Thermal Infrared Imaging Experiments of C-Type Asteroid 162173 Ryugu on Hayabusa2
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Overview of Hayabusa2 Mission and Asteroid 162173 Ryugu
Asteroid Science 2019 (LPI Contrib. No. 2189) 2086.pdf AN OVERVIEW OF HAYABUSA2 MISSION AND ASTEROID 162173 RYUGU. S. Watanabe1,2, M. Hira- bayashi3, N. Hirata4, N. Hirata5, M. Yoshikawa2, S. Tanaka2, S. Sugita6, K. Kitazato4, T. Okada2, N. Namiki7, S. Tachibana6,2, M. Arakawa5, H. Ikeda8, T. Morota6,1, K. Sugiura9,1, H. Kobayashi1, T. Saiki2, Y. Tsuda2, and Haya- busa2 Joint Science Team10, 1Nagoya University, Nagoya 464-8601, Japan ([email protected]), 2Institute of Space and Astronautical Science, JAXA, Japan, 3Auburn University, U.S.A., 4University of Aizu, Japan, 5Kobe University, Japan, 6University of Tokyo, Japan, 7National Astronomical Observatory of Japan, Japan, 8Research and Development Directorate, JAXA, Japan, 9Tokyo Institute of Technology, Japan, 10Hayabusa2 Project Summary: The Hayabusa2 mission reveals the na- Combined with the rotational motion of the asteroid, ture of a carbonaceous asteroid through a combination global surveys of Ryugu were conducted several times of remote-sensing observations, in situ surface meas- from ~20 km above the sub-Earth point (SEP), includ- urements by rovers and a lander, an active impact ex- ing global mapping from ONC-T (Fig. 1) and TIR, and periment, and analyses of samples returned to Earth. scan mapping from NIRS3 and LIDAR. Descent ob- Introduction: Asteroids are fossils of planetesi- servations covering the equatorial zone were performed mals, building blocks of planetary formation. In partic- from 3-7 km altitudes above SEP. Off-SEP observa- ular carbonaceous asteroids (or C-complex asteroids) tions of the polar regions were also conducted. Based are expected to have keys identifying the material mix- on these observations, we constructed two types of the ing in the early Solar System and deciphering the global shape models (using the Structure-from-Motion origin of water and organic materials on Earth [1]. -

Deep Impact As a World Observatory Event Held in Brussels, Belgium, 7–10 August 2006
Other Astronomical News Report on the Workshop on Deep Impact as a World Observatory Event held in Brussels, Belgium, 7–10 August 2006 Hans Ulrich Käufl1 One of the spectacular deconvolved images from the Christiaan Sterken2 Deep Impact Spacecraft High Resolution Imager shown in the conference (courtesy Mike A’Hearn and the Deep Impact Team). This is a colour composite of an infrared, a green and a violet filter forced to av- 1 ESO erage grey. Note the blueish areas on the surface 2 Vrije Universiteit Brussel, Belgium close to the crater-like structure. Those were entirely unexpected. It is highly interesting to find out if those structures can be correlated with the jets which were meticulously monitored from ground-based ob- In the context of NASA’s Deep Impact servers worldwide. This aspect in the picture – en- space mission, Comet 9P/Tempel1 tirely unrelated to the impact plume – illustrates very well how comet research, apart from the impact has been at the focus of an unprece- experiment, will profit from the synergy of spacecraft dented worldwide long-term multi- data and the unprecedented worldwide coordinated wavelength observation campaign. The observing campaign. comet has been studied through its perihelion passage by various spacecraft including the Deep Impact mission it- self, HST, Spitzer, Rosetta, XMM and all To make full use of the global data set, a To inspire new ideas, it was very helpful major ground-based observatories in workshop bringing together observers and interesting to have Roberta Olson basically all wavelength bands used in across the electromagnetic spectrum and from the New York Historical Society, astronomy, i.e. -

Dust Environment and Dynamical History of a Sample of Short-Period Comets II
A&A 571, A64 (2014) Astronomy DOI: 10.1051/0004-6361/201424331 & c ESO 2014 Astrophysics Dust environment and dynamical history of a sample of short-period comets II. 81P/Wild 2 and 103P/Hartley 2 F. J. Pozuelos1;3, F. Moreno1, F. Aceituno1, V. Casanova1, A. Sota1, J. J. López-Moreno1, J. Castellano2, E. Reina2, A. Climent2, A. Fernández2, A. San Segundo2, B. Häusler2, C. González2, D. Rodriguez2, E. Bryssinck2, E. Cortés2, F. A. Rodriguez2, F. Baldris2, F. García2, F. Gómez2, F. Limón2, F. Tifner2, G. Muler2, I. Almendros2, J. A. de los Reyes2, J. A. Henríquez2, J. A. Moreno2, J. Báez2, J. Bel2, J. Camarasa2, J. Curto2, J. F. Hernández2, J. J. González2, J. J. Martín2, J. L. Salto2, J. Lopesino2, J. M. Bosch2, J. M. Ruiz2, J. R. Vidal2, J. Ruiz2, J. Sánchez2, J. Temprano2, J. M. Aymamí2, L. Lahuerta2, L. Montoro2, M. Campas2, M. A. García2, O. Canales2, R. Benavides2, R. Dymock2, R. García2, R. Ligustri2, R. Naves2, S. Lahuerta2, and S. Pastor2 1 Instituto de Astrofísica de Andalucía (CSIC), Glorieta de la Astronomía s/n, 18008 Granada, Spain e-mail: [email protected] 2 Amateur Association Cometas-Obs, Spain 3 Universidad de Granada-Phd Program in Physics and Mathematics (FisyMat), 18071 Granada, Spain Received 3 June 2014 / Accepted 5 August 2014 ABSTRACT Aims. This paper is a continuation of the first paper in this series, where we presented an extended study of the dust environment of a sample of short-period comets and their dynamical history. On this occasion, we focus on comets 81P/Wild 2 and 103P/Hartley 2, which are of special interest as targets of the spacecraft missions Stardust and EPOXI. -

Size of Particles Ejected from an Artificial Impact Crater on Asteroid
A&A 647, A43 (2021) Astronomy https://doi.org/10.1051/0004-6361/202039777 & © K. Wada et al. 2021 Astrophysics Size of particles ejected from an artificial impact crater on asteroid 162173 Ryugu K. Wada1, K. Ishibashi1, H. Kimura1, M. Arakawa2, H. Sawada3, K. Ogawa2,4, K. Shirai2, R. Honda5, Y. Iijima3, T. Kadono6, N. Sakatani7, Y. Mimasu3, T. Toda3, Y. Shimaki3, S. Nakazawa3, H. Hayakawa3, T. Saiki3, Y. Takagi8, H. Imamura3, C. Okamoto2, M. Hayakawa3, N. Hirata9, and H. Yano3 1 Planetary Exploration Research Center, Chiba Institute of Technology, Narashino 275-0016, Japan e-mail: [email protected] 2 Department of Planetology, Kobe University, Kobe 657-8501, Japan 3 Institute of Space and Astronautical Science, Japan Aerospace Exploration Agency, Sagamihara 252-5210, Japan 4 JAXA Space Exploration Center, Japan Aerospace Exploration Agency, Sagamihara 252-5210, Japan 5 Department of Science and Technology, Kochi University, Kochi 780-8520, Japan 6 Department of Basic Sciences, University of Occupational and Environmental Health, Kitakyusyu 807-8555, Japan 7 Department of Physics, Rikkyo University, Tokyo 171-8501, Japan 8 Aichi Toho University, Nagoya 465-8515, Japan 9 School of Computer Science and Engineering, The University of Aizu, Aizu-Wakamatsu 965-8580, Japan Received 28 October 2020 / Accepted 26 January 2021 ABSTRACT A projectile accelerated by the Hayabusa2 Small Carry-on Impactor successfully produced an artificial impact crater with a final apparent diameter of 14:5 0:8 m on the surface of the near-Earth asteroid 162173 Ryugu on April 5, 2019. At the time of cratering, Deployable Camera 3 took± clear time-lapse images of the ejecta curtain, an assemblage of ejected particles forming a curtain-like structure emerging from the crater. -

A Ballistics Analysis of the Deep Impact Ejecta Plume: Determining Comet Tempel 1’S Gravity, Mass, and Density
Icarus 190 (2007) 357–390 www.elsevier.com/locate/icarus A ballistics analysis of the Deep Impact ejecta plume: Determining Comet Tempel 1’s gravity, mass, and density James E. Richardson a,∗,H.JayMeloshb, Carey M. Lisse c, Brian Carcich d a Center for Radiophysics and Space Research, Cornell University, Ithaca, NY 14853, USA b Lunar and Planetary Laboratory, University of Arizona, Tucson, AZ 85721-0092, USA c Planetary Exploration Group, Space Department, Johns Hopkins University Applied Physics Laboratory, 11100 Johns Hopkins Road, Laurel, MD 20723, USA d Center for Radiophysics and Space Research, Cornell University, Ithaca, NY 14853, USA Received 31 March 2006; revised 8 August 2007 Available online 15 August 2007 Abstract − In July of 2005, the Deep Impact mission collided a 366 kg impactor with the nucleus of Comet 9P/Tempel 1, at a closing speed of 10.2 km s 1. In this work, we develop a first-order, three-dimensional, forward model of the ejecta plume behavior resulting from this cratering event, and then adjust the model parameters to match the flyby-spacecraft observations of the actual ejecta plume, image by image. This modeling exercise indicates Deep Impact to have been a reasonably “well-behaved” oblique impact, in which the impactor–spacecraft apparently struck a small, westward-facing slope of roughly 1/3–1/2 the size of the final crater produced (determined from initial ejecta plume geometry), and possessing an effective strength of not more than Y¯ = 1–10 kPa. The resulting ejecta plume followed well-established scaling relationships for cratering in a medium-to-high porosity target, consistent with a transient crater of not more than 85–140 m diameter, formed in not more than 250–550 s, for the case of Y¯ = 0 Pa (gravity-dominated cratering); and not less than 22–26 m diameter, formed in not less than 1–3 s, for the case of Y¯ = 10 kPa (strength-dominated cratering). -
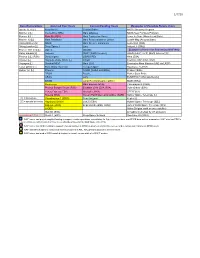
List of Missions Using SPICE (PDF)
1/7/20 Data Restorations Selected Past Users Current/Pending Users Examples of Possible Future Users Apollo 15, 16 [L] Magellan [L] Cassini Orbiter NASA Discovery Program Mariner 2 [L] Clementine (NRL) Mars Odyssey NASA New Frontiers Program Mariner 9 [L] Mars 96 (RSA) Mars Exploration Rover Lunar IceCube (Moorehead State) Mariner 10 [L] Mars Pathfinder Mars Reconnaissance Orbiter LunaH-Map (Arizona State) Viking Orbiters [L] NEAR Mars Science Laboratory Luna-Glob (RSA) Viking Landers [L] Deep Space 1 Juno Aditya-L1 (ISRO) Pioneer 10/11/12 [L] Galileo MAVEN Examples of Users not Requesting NAIF Help Haley armada [L] Genesis SMAP (Earth Science) GOLD (LASP, UCF) (Earth Science) [L] Phobos 2 [L] (RSA) Deep Impact OSIRIS REx Hera (ESA) Ulysses [L] Huygens Probe (ESA) [L] InSight ExoMars RSP (ESA, RSA) Voyagers [L] Stardust/NExT Mars 2020 Emmirates Mars Mission (UAE via LASP) Lunar Orbiter [L] Mars Global Surveyor Europa Clipper Hayabusa-2 (JAXA) Helios 1,2 [L] Phoenix NISAR (NASA and ISRO) Proba-3 (ESA) EPOXI Psyche Parker Solar Probe GRAIL Lucy EUMETSAT GEO satellites [L] DAWN Lunar Reconnaissance Orbiter MOM (ISRO) Messenger Mars Express (ESA) Chandrayan-2 (ISRO) Phobos Sample Return (RSA) ExoMars 2016 (ESA, RSA) Solar Orbiter (ESA) Venus Express (ESA) Akatsuki (JAXA) STEREO [L] Rosetta (ESA) Korean Pathfinder Lunar Orbiter (KARI) Spitzer Space Telescope [L] [L] = limited use Chandrayaan-1 (ISRO) New Horizons Kepler [L] [S] = special services Hayabusa (JAXA) JUICE (ESA) Hubble Space Telescope [S][L] Kaguya (JAXA) Bepicolombo (ESA, JAXA) James Webb Space Telescope [S][L] LADEE Altius (Belgian earth science satellite) ISO [S] (ESA) Armadillo (CubeSat, by UT at Austin) Last updated: 1/7/20 Smart-1 (ESA) Deep Space Network Spectrum-RG (RSA) NAIF has or had project-supplied funding to support mission operations, consultation for flight team members, and SPICE data archive preparation. -

EPOXI COMET ENCOUNTER FACT SHEET Nov
EPOXI COMET ENCOUNTER FACT SHEET Nov. 2, 2010 Quick Facts Flyby Spacecraft Dimensions: 3.3 meters (10.8 feet) long, 1.7 meters (5.6 feet) wide, and 2.3 meters (7.5 feet) high Weight: 601 kilograms (1,325 pounds) at launch, consisting of 517 kilograms (1,140 pounds) spacecraft and 84 kilograms (185 pounds) fuel. On 10/25/10 there was 4 kilograms (8.8 pounds) of fuel remaining. Power: 2.8-meter-by-2.8-meter (9-foot-by-9 foot) solar panel providing up to 750 watts, depending on distance from sun. Power storage via small, 16-amp- hourrechargeable nickel hydrogen battery Comet Hartley 2 Nucleus shape: Elongated Nucleus size (estimated): About 2.2 kilometers (1.4 miles) long Nucleus mass: Roughly 280 million metric tons Nucleus rotation period: About 18 hours Nucleus composition: Water ice, carbon dioxide ice, silicate dust Mission Launch: Jan. 12, 2005 Launch site: Cape Canaveral Air Force Station, Florida Launch vehicle: Delta II 7925 with Star 48 upper stage Impact with Tempel 1: 10:52 p.m. PDT July 3, 2005 (1:52 a.m. EDT July 4, 2005) Earth-comet distance at time of impact: 133.6 million kilometers (83 million miles) Total distance traveled by spacecraft from Earth to Tempel 1: 431 million kilometers (268 million miles) Flyby of Hartley 2: About 10 a.m. EDT or 7 a.m. PDT Nov. 4, 2010 Additional distance traveled by spacecraft to Hartley 2: About 4.6 billion kilometers (2.9 billion miles) Program Cost of Deep Impact: $267 million total (not including launch vehicle), consisting of $252 million spacecraft development and $15 million mission operations Cost of EPOXI extended mission: $42 million, for operations from 2007 to end of project at the end of fiscal year 2011. -

Arecibo Radar Observations of 14 High-Priority Near-Earth Asteroids in CY2020 and January 2021 Patrick A
Arecibo Radar Observations of 14 High-Priority Near-Earth Asteroids in CY2020 and January 2021 Patrick A. Taylor (LPI, USRA), Anne K. Virkki, Flaviane C.F. Venditti, Sean E. Marshall, Dylan C. Hickson, Luisa F. Zambrano-Marin (Arecibo Observatory, UCF), Edgard G. Rivera-Valent´ın, Sriram S. Bhiravarasu, Betzaida Aponte-Hernandez (LPI, USRA), Michael C. Nolan, Ellen S. Howell (U. Arizona), Tracy M. Becker (SwRI), Jon D. Giorgini, Lance A. M. Benner, Marina Brozovic, Shantanu P. Naidu (JPL), Michael W. Busch (SETI), Jean-Luc Margot, Sanjana Prabhu Desai (UCLA), Agata Rozek˙ (U. Kent), Mary L. Hinkle (UCF), Michael K. Shepard (Bloomsburg U.), and Christopher Magri (U. Maine) Summary We propose the continuation of the long-running project R3037 to physically and dynamically characterize the population of near-Earth asteroids with the Arecibo S-band (2380 MHz; 12.6 cm) planetary radar system. The objectives of project R3037 are to: (1) collect high-resolution radar images of and (2) report ultra-precise radar astrometry for the strongest predicted radar targets for the 2020 calendar year plus early January 2021. Such images will be used for three-dimensional shape modeling as the data sets allow. These observations will be carried out as part of the NASA- funded Arecibo planetary radar program, Grant No. 80NSSC19K0523, to PI Anne Virkki (Arecibo Observatory, University of Central Florida) with Patrick Taylor as Institutional PI at the Lunar and Planetary Institute (Universities Space Research Association). Background Radar is arguably the most powerful Earth-based technique for post-discovery physical and dynamical characterization of near-Earth asteroids (NEAs) and plays a crucial role in the nation’s planetary defense initiatives led through the NASA Planetary Defense Coordination Office. -

An Artificial Impact on the Asteroid (162173) Ryugu Formed a Crater in the Gravity-Dominated Regime M
An artificial impact on the asteroid (162173) Ryugu formed a crater in the gravity-dominated regime M. Arakawa, T. Saiki, K. Wada, K. Ogawa, T. Kadono, K. Shirai, H. Sawada, K. Ishibashi, R. Honda, N. Sakatani, et al. To cite this version: M. Arakawa, T. Saiki, K. Wada, K. Ogawa, T. Kadono, et al.. An artificial impact on the asteroid (162173) Ryugu formed a crater in the gravity-dominated regime. Science, American Association for the Advancement of Science, 2020, 368 (6486), pp.67-71. 10.1126/science.aaz1701. hal-02986191 HAL Id: hal-02986191 https://hal.archives-ouvertes.fr/hal-02986191 Submitted on 7 Jan 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Submitted Manuscript Title: An artificial impact on the asteroid 162173 Ryugu formed a crater in the gravity-dominated regime Authors: M. Arakawa1*, T. Saiki2, K. Wada3, K. Ogawa21,1, T. Kadono4, K. Shirai2,1, H. Sawada2, K. Ishibashi3, R. Honda5, N. Sakatani2, Y. Iijima2§, C. Okamoto1§, H. Yano2, Y. 5 Takagi6, M. Hayakawa2, P. Michel7, M. Jutzi8, Y. Shimaki2, S. Kimura9, Y. Mimasu2, T. Toda2, H. Imamura2, S. Nakazawa2, H. Hayakawa2, S. -

Planetary Science
Mission Directorate: Science Theme: Planetary Science Theme Overview Planetary Science is a grand human enterprise that seeks to discover the nature and origin of the celestial bodies among which we live, and to explore whether life exists beyond Earth. The scientific imperative for Planetary Science, the quest to understand our origins, is universal. How did we get here? Are we alone? What does the future hold? These overarching questions lead to more focused, fundamental science questions about our solar system: How did the Sun's family of planets, satellites, and minor bodies originate and evolve? What are the characteristics of the solar system that lead to habitable environments? How and where could life begin and evolve in the solar system? What are the characteristics of small bodies and planetary environments and what potential hazards or resources do they hold? To address these science questions, NASA relies on various flight missions, research and analysis (R&A) and technology development. There are seven programs within the Planetary Science Theme: R&A, Lunar Quest, Discovery, New Frontiers, Mars Exploration, Outer Planets, and Technology. R&A supports two operating missions with international partners (Rosetta and Hayabusa), as well as sample curation, data archiving, dissemination and analysis, and Near Earth Object Observations. The Lunar Quest Program consists of small robotic spacecraft missions, Missions of Opportunity, Lunar Science Institute, and R&A. Discovery has two spacecraft in prime mission operations (MESSENGER and Dawn), an instrument operating on an ESA Mars Express mission (ASPERA-3), a mission in its development phase (GRAIL), three Missions of Opportunities (M3, Strofio, and LaRa), and three investigations using re-purposed spacecraft: EPOCh and DIXI hosted on the Deep Impact spacecraft and NExT hosted on the Stardust spacecraft. -

Planetary Science Update & Perspectives on Venus Exploration
Planetary Science Update & Perspectives on Venus Exploration Presentation at VEXAG James L. Green Director, Planetary Science Division May 6, 2008 1 Outline • FY09 Presidents Budget • Venus exploration opportunities: – Plans for next New Frontiers – Plans for next Discovery – Plans for SALMON – R&A opportunities 2 BUDGET BY SCIENCE THEME 3 Planetary Division 4 Planetary Division 5 What Changed, What’s the Same What Changed: • Initiated an Outer Planets Flagship (OPF) study activity joint with ESA/JAXA. • Lunar Science Research augmented to include a series of small lunar spacecraft. • Augments and enhances R&A to return more results from Planetary missions. • Discovery Program: Includes the recently selected MoOs (EPOXI and Stardust-NExT), adds Aspera-3 2nd extension (ESA/Mars Express), and selected GRAIL. • Preserves critical ISP work FY08 thru FY10, but deletes outyear activities in favor of more critical R&A and RPS enhancements. • Completes the Advanced Stirling RPS development and prepares for flight demonstration. • Mars Scout 2011 delayed to 2013 due to conflict of interest discovered during proposal evaluation. • Direction to the Mars Program to study Mars Sample Return (MSR) as a next decade goal • Expands US participation on the ESA/ExoMars mission by funding the potential selection of BOTH candidate U.S. instruments and EDL support. What’s the Same: • Discovery Program: MESSENGER, Dawn, Mars Express/Aspera-3, Chandraayn/MMM • New Frontiers Program: Juno and New Horizons • Mars Program: Odyssey, MER, MRO, Phoenix, MSL • Research -

Thermal Inertia of Asteroid Ryugu Using Dawn-Side Thermal Images by TIR on Hayabusa2
EPSC Abstracts Vol. 13, EPSC-DPS2019-268-1, 2019 EPSC-DPS Joint Meeting 2019 c Author(s) 2019. CC Attribution 4.0 license. Thermal inertia of asteroid Ryugu using dawn-side thermal images by TIR on Hayabusa2 Tatsuaki Okada (1,2), Tetsuya Fukuhara (3), Satoshi Tanaka (1), Makoto Taguchi (3), Takehiko Arai (4), Naoya Sakatani (1), Yuri Shimaki (1), Hiroki Senshu (5), Hirohide Demura (6), Yoshiko Ogawa (6), Kentaro Suko (6), Tomohiko Sekiguchi (7), Toru Kouyama (8), Jorn Helbert (9), Thomas G. Mueller (10), Axel Hagermann (11), Jens Biele (12), Matthias Grott (9), Maximilian Hamm (9), Marco Delbo (13), and Hayabusa2 TIR Team (1) Institute of Space and Astronautical Science, Japan Aerospace Exploration Agency, Sagamihara, Japan, (2) University of Tokyo, Japan, (3) Rikkyo University, Tokyo, Japan, (4) Ashikaga University, Japan, (5) Chiba Institute of Technology, Narashino, Japan, (6) University of Aizu, Aizu-Wakamatsu, Japan, (7) Hokkaido University of Education, Asahikawa, Japan, (8) National Institute of Advanced Industrial Science and Technology, Tokyo, Japan, (9) German Aerospace Centre, Berlin, Germany, (10) Max-Planck Institute for Extraterrestrial Physics, Garching, Germany, (11) University of Stirling, UK, (12) German Aerospace Centre, Cologne, Germany, (13) Code d’Azur Observatory, Nice, France. Abstract 30 % porosity. The surface features imaged by MasCAM on MASCOT indicated the very fluffy A thermal inertia map of the C-type Near-Earth surface [5]. This time the temperature at the night asteroid 162173 Ryugu has been derived using the side area observed by TIR was applied improve the one-rotation global thermal image sets observed from estimate of the global thermal inertia of Ryugu.