Thesis Aims to Develop a Lightweight Execution Environment Exploiting Ap- Plication Semantics to Optimize Tail Performance for Cloud Services
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Listener Feedback #171
Security Now! Transcript of Episode #411 Page 1 of 40 Transcript of Episode #411 Listener Feedback #171 Description: Steve and Leo discuss the week's major security events and discuss questions and comments from listeners of previous episodes. They tie up loose ends, explore a wide range of topics that are too small to fill their own episode, clarify any confusion from previous installments, and present real world 'application notes' for any of the security technologies and issues we have previously discussed. High quality (64 kbps) mp3 audio file URL: http://media.GRC.com/sn/SN-411.mp3 Quarter size (16 kbps) mp3 audio file URL: http://media.GRC.com/sn/sn-411-lq.mp3 SHOW TEASE: It's time for Security Now!. Steve Gibson is here. We've got questions from our audience. We're going to answer those, talk a little bit about the math around NSA's 5ZB, also some more revelations on SSL security. It's all coming up next on Security Now!. Leo Laporte: This is Security Now! with Steve Gibson, Episode 411, recorded July 3rd, 2013: Your questions, Steve's answers, #171. It's time for Security Now!, the show that protects you and your loved ones online, your privacy, and also gives you deep insight into how computers work, how technology works, how the Internet works, with this guy here. Yeah, he's the Explainer in Chief, Mr. Steve Gibson. Hello, Steven. Steve Gibson: You know, Leo, I wondered whether maybe we'd gone a little, you know, there's the expression "jump the shark," or off, over the top or something last week. -
What Is Xkeyscore, and Can It 'Eavesdrop on Everyone, Everywhere'? (+Video) - Csmonitor.Com
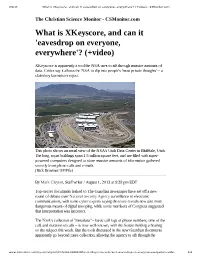
8/3/13 What is XKeyscore, and can it 'eavesdrop on everyone, everywhere'? (+video) - CSMonitor.com The Christian Science Monitor CSMonitor.com What is XKeyscore, and can it 'eavesdrop on everyone, everywhere'? (+video) XKeyscore is apparently a tool the NSA uses to sift through massive amounts of data. Critics say it allows the NSA to dip into people's 'most private thoughts' – a claim key lawmakers reject. This photo shows an aerial view of the NSA's Utah Data Center in Bluffdale, Utah. The long, squat buildings span 1.5 million square feet, and are filled with super powered computers designed to store massive amounts of information gathered secretly from phone calls and emails. (Rick Bowmer/AP/File) By Mark Clayton, Staff writer / August 1, 2013 at 9:38 pm EDT Topsecret documents leaked to The Guardian newspaper have set off a new round of debate over National Security Agency surveillance of electronic communications, with some cyber experts saying the trove reveals new and more dangerous means of digital snooping, while some members of Congress suggested that interpretation was incorrect. The NSA's collection of "metadata" – basic call logs of phone numbers, time of the call, and duration of calls – is now wellknown, with the Senate holding a hearing on the subject this week. But the tools discussed in the new Guardian documents apparently go beyond mere collection, allowing the agency to sift through the www.csmonitor.com/layout/set/print/USA/2013/0801/What-is-XKeyscore-and-can-it-eavesdrop-on-everyone-everywhere-video 1/4 8/3/13 What is XKeyscore, and can it 'eavesdrop on everyone, everywhere'? (+video) - CSMonitor.com haystack of digital global communications to find the needle of terrorist activity. -

微软郑宇:大数据解决城市大问题 18 更智能的家庭 19 微博拾粹 Weibo Highlights
2015年1月 第33期 P7 WWT: 数字宇宙,虚拟星空 P16 P12 带着微软坐过山车 P4 P10 1 微软亚洲研究院 2015年1月 第33期 以“开放”和“极客创新”精神铸造一个“新”微软 3 第十六届“二十一世纪的计算”学术研讨会成功举办 4 微软与清华大学联合举办2014年微软亚太教育峰会 5 你还记得一夜暴红的机器人小冰吗? 7 Peter Lee:带着微软坐过山车 10 计算机科学家周以真专访 12 WWT:数字宇宙,虚拟星空 16 微软郑宇:大数据解决城市大问题 18 更智能的家庭 19 微博拾粹 Weibo Highlights @微软亚洲研究院 官方微博精彩选摘 20 让虚拟世界更真实 22 4K时代,你不能不知道的HEVC 25 小冰的三项绝技是如何炼成的? 26 科研伴我成长——上海交通大学ACM班学生在微软亚洲研究院的幸福实习生活 28 年轻的心与渐行渐近的梦——记微软-斯坦福产品设计创新课程ME310 30 如何写好简历,找到心仪的暑期实习 32 微软研究员Eric Horvitz解读“人工智能百年研究” 33 2 以“开放”和“极客创新”精神 铸造一个“新”微软 爆竹声声辞旧岁,喜气洋“羊”迎新年。转眼间,这一 年的时光即将伴着哒哒的马蹄声奔驰而去。在这辞旧迎新的 时刻,我们怀揣着对技术改变未来的美好憧憬,与所有为推 动互联网不断发展、为人类科技进步不断奋斗的科技爱好者 一起,敲响新年的钟声。挥别2014,一起期盼那充满希望 的新一年! 即将辞行的是很不平凡的一年。这一年的互联网风起云 涌,你方唱罢我登场,比起往日的峥嵘有过之而无不及:可 穿戴设备和智能家居成为众人争抢的高地;人工智能在逐渐 触手可及的同时又引起争议不断;一轮又一轮创业大潮此起 彼伏,不断有优秀的新公司和新青年展露头角。这一年的微 软也在众人的关注下发生着翻天覆地的变化:第三任CEO Satya Nadella屡新,确定以移动业务和云业务为中心 的公司战略,以开放的姿态拥抱移动互联的新时代,发布新一代Windows 10操作系统……于我个人而言,这一 年,就任微软亚太研发集团主席开启了我20年微软旅程上的新篇章。虽然肩上的担子更重了,但心中的激情却 丝毫未减。 “开放”和“极客创新”精神是我们在Satya时代看到微软文化的一个演进。“开放”是指不固守陈规,不囿 于往日的羁绊,用户在哪里需要我们,微软的服务就去哪里。推出Office for iOS/Android,开源.Net都是“开放” 的“新”微软对用户做出的承诺。关于“极客创新”,大家可能都已经听说过“车库(Garage)”这个词了,当年比 尔∙盖茨最早就是在车库里开始创业的。2014年,微软在全球范围内举办了“极客马拉松大赛(Hackthon)”,并鼓 励员工在业余时间加入“微软车库”项目,将自己的想法变为现实。这一系列的举措都是希望激发微软员工的“极 客创新”精神,我们也欣喜地看到变化正在微软内部潜移默化地进行着。“微软车库”目前已经公布了一部分有趣 的项目,我相信,未来还会有更多让人眼前一亮的创新。 2015年,我希望微软亚洲研究院和微软亚太研发集团的同事能够保持和发扬“开放”和“极客创新”的精 神。我们一起铸造一个“新”微软,为用户创造更多的惊喜! 微软亚洲研究院院长 3 第十六届“二十一世纪的计算”学术研讨会成功举办 2014年10月29日由微软亚洲研究院与北京大学联合主办的“二 形图像等领域的突破:微软语音助手小娜的背后,蕴藏着一系列人 十一世纪的计算”大型学术研讨会,在北京大学举行。包括有“计 工智能技术;大数据和机器学习技术帮助我们更好地认识城市和生 算机科学领域的诺贝尔奖”之称的图灵奖获得者、来自微软及学术 -

Hardware Configuration with Dynamically-Queried Formal Models
Master’s Thesis Nr. 180 Systems Group, Department of Computer Science, ETH Zurich Hardware Configuration With Dynamically-Queried Formal Models by Daniel Schwyn Supervised by Reto Acherman Dr. David Cock Prof. Dr. Timothy Roscoe April 2017 – October 2017 Abstract Hardware is getting increasingly complex and heterogeneous. With different compo- nents having different views of the system, the traditional assumption of unique phys- ical addresses has become an illusion. To adapt to such hardware, an operating system (OS) needs to understand the complex address translation chains and be able to handle the presence of multiple address spaces. This thesis takes a recently proposed model that formally captures these aspects and applies it to hardware configuration in the Barrelfish OS. To this end, I present Sockeye, a domain specific language that uses the model to de- scribe hardware. I then show, that code relying on knowledge about the address spaces in a system can be statically generated from these specifications. Furthermore, the model is successfully applied to device management, showing that it can also be used to configure hardware at runtime. The implementation presented here does not rely on any platform specific code and it reduced the amount of such code in Barrelfish’s device manager by over 30%. Applying the model to further hardware configuration tasks is expected to have similar effects. i Acknowledgements First of all, I want to thank my advisers Timothy Roscoe, David Cock and Reto Acher- mann for their guidance and support. Their feedback and critical questions were a valuable contribution to this thesis. I’d also like to thank the rest of the Barrelfish team and other members of the Systems Group at ETH for the interesting discussions during meetings and coffee breaks. -

Advocating for Basic Constitutional Search Protections to Apply to Cell Phones from Eavesdropping and Tracking by Government and Corporate Entities
University of Central Florida STARS HIM 1990-2015 2013 Brave New World Reloaded: Advocating for Basic Constitutional Search Protections to Apply to Cell Phones from Eavesdropping and Tracking by Government and Corporate Entities Mark Berrios-Ayala University of Central Florida Part of the Legal Studies Commons Find similar works at: https://stars.library.ucf.edu/honorstheses1990-2015 University of Central Florida Libraries http://library.ucf.edu This Open Access is brought to you for free and open access by STARS. It has been accepted for inclusion in HIM 1990-2015 by an authorized administrator of STARS. For more information, please contact [email protected]. Recommended Citation Berrios-Ayala, Mark, "Brave New World Reloaded: Advocating for Basic Constitutional Search Protections to Apply to Cell Phones from Eavesdropping and Tracking by Government and Corporate Entities" (2013). HIM 1990-2015. 1519. https://stars.library.ucf.edu/honorstheses1990-2015/1519 BRAVE NEW WORLD RELOADED: ADVOCATING FOR BASIC CONSTITUTIONAL SEARCH PROTECTIONS TO APPLY TO CELL PHONES FROM EAVESDROPPING AND TRACKING BY THE GOVERNMENT AND CORPORATE ENTITIES by MARK KENNETH BERRIOS-AYALA A thesis submitted in partial fulfillment of the requirements for the Honors in the Major Program in Legal Studies in the College of Health and Public Affairs and in The Burnett Honors College at the University of Central Florida Orlando, Florida Fall Term 2013 Thesis Chair: Dr. Abby Milon ABSTRACT Imagine a world where someone’s personal information is constantly compromised, where federal government entities AKA Big Brother always knows what anyone is Googling, who an individual is texting, and their emoticons on Twitter. -

Drowning in Data 15 3
BRENNAN CENTER FOR JUSTICE WHAT THE GOVERNMENT DOES WITH AMERICANS’ DATA Rachel Levinson-Waldman Brennan Center for Justice at New York University School of Law about the brennan center for justice The Brennan Center for Justice at NYU School of Law is a nonpartisan law and policy institute that seeks to improve our systems of democracy and justice. We work to hold our political institutions and laws accountable to the twin American ideals of democracy and equal justice for all. The Center’s work ranges from voting rights to campaign finance reform, from racial justice in criminal law to Constitutional protection in the fight against terrorism. A singular institution — part think tank, part public interest law firm, part advocacy group, part communications hub — the Brennan Center seeks meaningful, measurable change in the systems by which our nation is governed. about the brennan center’s liberty and national security program The Brennan Center’s Liberty and National Security Program works to advance effective national security policies that respect Constitutional values and the rule of law, using innovative policy recommendations, litigation, and public advocacy. The program focuses on government transparency and accountability; domestic counterterrorism policies and their effects on privacy and First Amendment freedoms; detainee policy, including the detention, interrogation, and trial of terrorist suspects; and the need to safeguard our system of checks and balances. about the author Rachel Levinson-Waldman serves as Counsel to the Brennan Center’s Liberty and National Security Program, which seeks to advance effective national security policies that respect constitutional values and the rule of law. -

A Tensor Compiler for Unified Machine Learning Prediction Serving
A Tensor Compiler for Unified Machine Learning Prediction Serving Supun Nakandala, UC San Diego; Karla Saur, Microsoft; Gyeong-In Yu, Seoul National University; Konstantinos Karanasos, Carlo Curino, Markus Weimer, and Matteo Interlandi, Microsoft https://www.usenix.org/conference/osdi20/presentation/nakandala This paper is included in the Proceedings of the 14th USENIX Symposium on Operating Systems Design and Implementation November 4–6, 2020 978-1-939133-19-9 Open access to the Proceedings of the 14th USENIX Symposium on Operating Systems Design and Implementation is sponsored by USENIX A Tensor Compiler for Unified Machine Learning Prediction Serving Supun Nakandalac,∗, Karla Saurm, Gyeong-In Yus,∗, Konstantinos Karanasosm, Carlo Curinom, Markus Weimerm, Matteo Interlandim mMicrosoft, cUC San Diego, sSeoul National University {<name>.<surname>}@microsoft.com,[email protected], [email protected] Abstract TensorFlow [13] combined, and growing faster than both. Machine Learning (ML) adoption in the enterprise requires Acknowledging this trend, traditional ML capabilities have simpler and more efficient software infrastructure—the be- been recently added to DNN frameworks, such as the ONNX- spoke solutions typical in large web companies are simply ML [4] flavor in ONNX [25] and TensorFlow’s TFX [39]. untenable. Model scoring, the process of obtaining predic- When it comes to owning and operating ML solutions, en- tions from a trained model over new data, is a primary con- terprises differ from early adopters in their focus on long-term tributor to infrastructure complexity and cost as models are costs of ownership and amortized return on investments [68]. trained once but used many times. In this paper we propose As such, enterprises are highly sensitive to: (1) complexity, HUMMINGBIRD, a novel approach to model scoring, which (2) performance, and (3) overall operational efficiency of their compiles featurization operators and traditional ML models software infrastructure [14]. -

Message Passing for Programming Languages and Operating Systems
Master’s Thesis Nr. 141 Systems Group, Department of Computer Science, ETH Zurich Message Passing for Programming Languages and Operating Systems by Martynas Pumputis Supervised by Prof. Dr. Timothy Roscoe, Dr. Antonios Kornilios Kourtis, Dr. David Cock October 7, 2015 Abstract Message passing as a mean of communication has been gaining popu- larity within domains of concurrent programming languages and oper- ating systems. In this thesis, we discuss how message passing languages can be ap- plied in the context of operating systems which are heavily based on this form of communication. In particular, we port the Go program- ming language to the Barrelfish OS and integrate the Go communi- cation channels with the messaging infrastructure of Barrelfish. We show that the outcome of the porting and the integration allows us to implement OS services that can take advantage of the easy-to-use concurrency model of Go. Our evaluation based on LevelDB benchmarks shows comparable per- formance to the Linux port. Meanwhile, the overhead of the messag- ing integration causes the poor performance when compared to the native messaging of Barrelfish, but exposes an easier to use interface, as shown by the example code. i Acknowledgments First of all, I would like to thank Timothy Roscoe, Antonios Kornilios Kourtis and David Cock for giving the opportunity to work on the Barrelfish OS project, their supervision, inspirational thoughts and critique. Next, I would like to thank the Barrelfish team for the discussions and the help. In addition, I would like to thank Sebastian Wicki for the conversations we had during the entire period of my Master’s studies. -

Operating System Support for Redundant Multithreading
Operating System Support for Redundant Multithreading Dissertation zur Erlangung des akademischen Grades Doktoringenieur (Dr.-Ing.) Vorgelegt an der Technischen Universität Dresden Fakultät Informatik Eingereicht von Dipl.-Inf. Björn Döbel geboren am 17. Dezember 1980 in Lauchhammer Betreuender Hochschullehrer: Prof. Dr. Hermann Härtig Technische Universität Dresden Gutachter: Prof. Frank Mueller, Ph.D. North Carolina State University Fachreferent: Prof. Dr. Christof Fetzer Technische Universität Dresden Statusvortrag: 29.02.2012 Eingereicht am: 21.08.2014 Verteidigt am: 25.11.2014 FÜR JAKOB *† 15. Februar 2013 Contents 1 Introduction 7 1.1 Hardware meets Soft Errors 8 1.2 An Operating System for Tolerating Soft Errors 9 1.3 Whom can you Rely on? 12 2 Why Do Transistors Fail And What Can Be Done About It? 15 2.1 Hardware Faults at the Transistor Level 15 2.2 Faults, Errors, and Failures – A Taxonomy 18 2.3 Manifestation of Hardware Faults 20 2.4 Existing Approaches to Tolerating Faults 25 2.5 Thesis Goals and Design Decisions 36 3 Redundant Multithreading as an Operating System Service 39 3.1 Architectural Overview 39 3.2 Process Replication 41 3.3 Tracking Externalization Events 42 3.4 Handling Replica System Calls 45 3.5 Managing Replica Memory 49 3.6 Managing Memory Shared with External Applications 57 3.7 Hardware-Induced Non-Determinism 63 3.8 Error Detection and Recovery 65 4 Can We Put the Concurrency Back Into Redundant Multithreading? 71 4.1 What is the Problem with Multithreaded Replication? 71 4.2 Can we make Multithreading -

High Velocity Kernel File Systems with Bento
High Velocity Kernel File Systems with Bento Samantha Miller, Kaiyuan Zhang, Mengqi Chen, and Ryan Jennings, University of Washington; Ang Chen, Rice University; Danyang Zhuo, Duke University; Thomas Anderson, University of Washington https://www.usenix.org/conference/fast21/presentation/miller This paper is included in the Proceedings of the 19th USENIX Conference on File and Storage Technologies. February 23–25, 2021 978-1-939133-20-5 Open access to the Proceedings of the 19th USENIX Conference on File and Storage Technologies is sponsored by USENIX. High Velocity Kernel File Systems with Bento Samantha Miller Kaiyuan Zhang Mengqi Chen Ryan Jennings Ang Chen‡ Danyang Zhuo† Thomas Anderson University of Washington †Duke University ‡Rice University Abstract kernel-level debuggers and kernel testing frameworks makes this worse. The restricted and different kernel programming High development velocity is critical for modern systems. environment also limits the number of trained developers. This is especially true for Linux file systems which are seeing Finally, upgrading a kernel module requires either rebooting increased pressure from new storage devices and new demands the machine or restarting the relevant module, either way on storage systems. However, high velocity Linux kernel rendering the machine unavailable during the upgrade. In the development is challenging due to the ease of introducing cloud setting, this forces kernel upgrades to be batched to meet bugs, the difficulty of testing and debugging, and the lack of cloud-level availability goals. support for redeployment without service disruption. Existing Slow development cycles are a particular problem for file approaches to high-velocity development of file systems for systems. -

Utah Data Center, As Well As Any Search Results Pages
This document is made available through the declassification efforts and research of John Greenewald, Jr., creator of: The Black Vault The Black Vault is the largest online Freedom of Information Act (FOIA) document clearinghouse in the world. The research efforts here are responsible for the declassification of hundreds of thousands of pages released by the U.S. Government & Military. Discover the Truth at: http://www.theblackvault.com NATIONAL SECURITY AGENCY CENTRAL SECURITY SERVICE FORT GEORGE G. MEADE, MARYLAND 20755-6000 FOIA Case: 84688A 2 May 2017 JOHN GREENEWALD Dear Mr. Greenewald : This responds to your Freedom of Information Act (FOIA) request of 14 June 2016 for Intellipedia pages on Boundless Information and/or BOUNDLESS INFORMANT and/or Bull Run and/or BULLRUN and/or Room 641A and/ or Stellar Wind and/ or Tailored Access Operations and/ or Utah Data Center, as well as any search results pages. A copy of your request is enclosed. As stated in our previous response, dated 15 June 2016, your request was assigned Case Number 84688. For purposes of this request and based on the information you provided in your letter, you are considered an "all other" requester. As such, you are allowed 2 hours of search and the duplication of 100 pages at no cost. There are no assessable fees for this request. Your request has been processed under the FOIA. For your information, NSA provides a service of common concern for the Intelligence Community (IC) by serving as the executive agent for Intelink. As such, NSA provides technical services that enable users to access and share information with peers and stakeholders across the IC and DoD. -
Lightgbm Release 3.2.1.99
LightGBM Release 3.2.1.99 Microsoft Corporation Sep 26, 2021 CONTENTS: 1 Installation Guide 3 2 Quick Start 21 3 Python-package Introduction 23 4 Features 29 5 Experiments 37 6 Parameters 43 7 Parameters Tuning 65 8 C API 71 9 Python API 99 10 Distributed Learning Guide 175 11 LightGBM GPU Tutorial 185 12 Advanced Topics 189 13 LightGBM FAQ 191 14 Development Guide 199 15 GPU Tuning Guide and Performance Comparison 201 16 GPU SDK Correspondence and Device Targeting Table 205 17 GPU Windows Compilation 209 18 Recommendations When Using gcc 229 19 Documentation 231 20 Indices and Tables 233 Index 235 i ii LightGBM, Release 3.2.1.99 LightGBM is a gradient boosting framework that uses tree based learning algorithms. It is designed to be distributed and efficient with the following advantages: • Faster training speed and higher efficiency. • Lower memory usage. • Better accuracy. • Support of parallel, distributed, and GPU learning. • Capable of handling large-scale data. For more details, please refer to Features. CONTENTS: 1 LightGBM, Release 3.2.1.99 2 CONTENTS: CHAPTER ONE INSTALLATION GUIDE This is a guide for building the LightGBM Command Line Interface (CLI). If you want to build the Python-package or R-package please refer to Python-package and R-package folders respectively. All instructions below are aimed at compiling the 64-bit version of LightGBM. It is worth compiling the 32-bit version only in very rare special cases involving environmental limitations. The 32-bit version is slow and untested, so use it at your own risk and don’t forget to adjust some of the commands below when installing.