The Pulsed Linear Induction Motor Concept for High-Speed Trains
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Brooklyn Transit Primary Source Packet
BROOKLYN TRANSIT PRIMARY SOURCE PACKET Student Name 1 2 INTRODUCTORY READING "New York City Transit - History and Chronology." Mta.info. Metropolitan Transit Authority. Web. 28 Dec. 2015. Adaptation In the early stages of the development of public transportation systems in New York City, all operations were run by private companies. Abraham Brower established New York City's first public transportation route in 1827, a 12-seat stagecoach that ran along Broadway in Manhattan from the Battery to Bleecker Street. By 1831, Brower had added the omnibus to his fleet. The next year, John Mason organized the New York and Harlem Railroad, a street railway that used horse-drawn cars with metal wheels and ran on a metal track. By 1855, 593 omnibuses traveled on 27 Manhattan routes and horse-drawn cars ran on street railways on Third, Fourth, Sixth, and Eighth Avenues. Toward the end of the 19th century, electricity allowed for the development of electric trolley cars, which soon replaced horses. Trolley bus lines, also called trackless trolley coaches, used overhead lines for power. Staten Island was the first borough outside Manhattan to receive these electric trolley cars in the 1920s, and then finally Brooklyn joined the fun in 1930. By 1960, however, motor buses completely replaced New York City public transit trolley cars and trolley buses. The city's first regular elevated railway (el) service began on February 14, 1870. The El ran along Greenwich Street and Ninth Avenue in Manhattan. Elevated train service dominated rapid transit for the next few decades. On September 24, 1883, a Brooklyn Bridge cable-powered railway opened between Park Row in Manhattan and Sands Street in Brooklyn, carrying passengers over the bridge and back. -
Investigation, Analysis and Design of the Linear Brushless Doubly-Fed
AN ABSTRACT OF THE THESIS OF Farroh Seifkhani for the degree of Master of Science in Electrical and Computer Engineering presented on February 8, 1991 . Title: Investigation, Analysis and Design of the Linear Brush less Doubly-Fed Machine.Redacted for Privacy Abstract approved: K. Wallace This thesis covers theefforts of thedesign, analysis, characteristics, and construction of a Linear Brush less Doubly-Fed Machine (LBDFM), as well as the results of the investigations and comparison with its actual prototype. In recent years, attempts to develop new means of high-speed, efficient transportation have led to considerable world-wide interest in high-speed trains. This concern has generated interests in the linear induction motor which has been considered as one of the more appropriate propulsion systems for Super-High-Speed Trains (SHST). Research and experiments on linear induction motors arebeing actively pursued in a number of countries. Linear induction motors are generally applicable for the production of motion in a straight line, eliminating the need for gears and other mechanisms for conversion of rotational motion to linear motion. The idea of investigation and construction of the linear brushless doubly-fed motor was first propounded at Oregon State University, because of potential applications as Variable-Speed Transportation (VST) system. The perceived advantages of a LBDFM over other LIM's are significant reduction of cost and maintenance requirements. The cost of this machine itself is expected to be similar to that of a conventionalLIM. However, it is believed that the rating of the power converter required for control of the traveling magnetic wave in the air gap is a fraction of the machine rating. -

Elevated Railway. SEE--Ste-A-SEE
J. W. POST Elevated Railway. No. 206,385. Patented July 23, 1878. SEE--Ste-A-SEE- - -A-C-E- N 2- to sa, 4. YYl 2%a.SSSSSSS-412 A. 22 2 22 o a. WITNESSES Ze w A NVENTOR 2% ATORNEY . N. PerERs, Photo-LTHOGRAPHER, washington, D. c. ga, as UNITED STATES PATENT OFFICE. - JOIN W. POST, OF NEW YORK, N. Y. IMPROVEMENT IN ELEVATED RALWAYS. Specification forming part of Letters Patent No. 206, 3S-5, lated July 23, 1S7s; application filed July 11, 1878. To all chon it may concern: foundlation-plate of suitable size, which is Be it known that I, JoHN W. POST, of New firmly laid on bed-rock or other substantial York city, in the county of New York and base in a suitable excavation, and securely State of New York, have invented certain new embedded in proper position by cement or oth and useful Improvements in Elevated Rail erwise. Upon the top of said plate is laid roads; and I do hereby declare that the fol some indestructible non-conducting and non lowing is a full, clear, and exact description vibrating substance B. thereof, which will enable others skilled in The letter C represents the columns, stand the art to which it appertains to make and use ards, or posts which support the superstruc the same, reference being had to the accompa ture. These are made hollow, and each are inying drawings, and to letters of reference provided with a flanged base, D, which rests lmarked thereon, which form a part of this upon the top of the base-plate and its packing, specification. -

JPB Board of Directors Meeting of October 3, 2019 Correspondence
JPB Board of Directors Meeting of October 3, 2019 Correspondence as of October 1, 2019 # Subject 1. The Gravity of RWC Station 2. Caltrain Business Plan Long Range Service Vision 3. Redwood trees along San Carlos Station Platform 4. Caltrain 2.0 – Elevated: Save $7B+, Better SF Stations, Bike Path From: Ian Bain To: Jeremy Smith Cc: GRP-City Council; Board (@caltrain.com); Board (@samtrans.com); Warren Slocum; Sequoia Center Vision Subject: Re: The Gravity of RWC Station Date: Friday, September 27, 2019 2:58:18 PM Dear Mr. Smith, On behalf of the City Council, thank you for writing to express your thoughts on the Sequoia Station proposal. If this proposal were to go forward, it would require a general plan amendment. As part of due process, City staff will evaluate the developer's proposal, and I believe it will take a couple of months before this issue comes before the Council to consider whether to initiate an amendment process. When it does, your thoughts and concerns will be considered. Thank you again for writing to us. Respectfully, Ian Bain IAN BAIN Mayor City of Redwood City Phone: (650) 780-7565 E-mail: [email protected] www.redwoodcity.org On Fri, Sep 27, 2019 at 10:06 AM Jeremy Smith <[email protected]> wrote: Esteemed council members, I am one of the “young” people riddled with worry about climate change and how the destruction it poses to our world and local communities. Living densely around transit is one of the best ways we in the Bay Area can reduce our carbon emissions and maintain economic growth per a UC Berkeley report in 2017 and several others since then. -
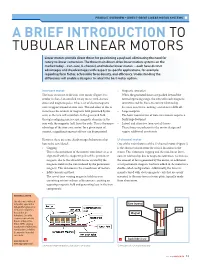
A BRIEF INTRODUCTION to TUBULAR LINEAR MOTORS Linear Motors Provide Direct Thrust for Positioning a Payload, Eliminating the Need for Rotary-To-Linear Conversion
PRODUCT OVERVIEW – DIRECT-DRIVE LINEAR MOTOR SYSTEMS A BRIEF INTRODUCTION TO TUBULAR LINEAR MOTORS Linear motors provide direct thrust for positioning a payload, eliminating the need for rotary-to-linear conversion. The three main direct-drive linear motion systems on the market today – iron-core, U-channel, and tubular linear motors – each have distinct advantages and disadvantages with respect to specific applications, for example regarding form factor, achievable force density, and efficiency. Understanding the differences will enable a designer to select the best motor option. Iron-core motor • Magnetic saturation The basic structure of the iron-core motor (Figure 1) is When the generated forces are pushed beyond the similar to that of an unrolled rotary motor with discrete normal operating range, the iron will reach magnetic stator and magnetic poles. It has a set of electromagnetic saturation and the force-to-current relationship coils wrapped around an iron core. The end effect of this is becomes non-linear, making control more difficult. to increase the amount of magnetic field generated by the • Large footprint coils, as the iron will contribute to the generated field The basic construction of iron-core motors requires a through realigning microscopic magnetic domains in the fairly large footprint. iron with the magnetic field from the coils. This is the major • Lateral and attractive (non-useful) forces advantage of the iron-core motor: for a given input of These forces are inherent to the motor design and current, a significant amount of force can be generated. require additional constraints. However, there are some disadvantages/behaviours that U-channel motor have to be considered: One of the main features of the U-channel motor (Figure 2) • Cogging is the absence of iron from the critical locations in the This is the movement of the motor’s iron forcer so as to motor. -

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -

Overlapped Electromagnetic Coilgun for Low Speed Projectiles
ISSN (Print) 1226-1750 ISSN (Online) 2233-6656 Journal of Magnetics 20(3), 322-329 (2015) http://dx.doi.org/10.4283/JMAG.2015.20.3.322 Overlapped Electromagnetic Coilgun for Low Speed Projectiles Hany M. Mohamed1, Mahmoud A. Abdalla2*, Abdelazez Mitkees, and Waheed Sabery Electrical Engineering Branch, MTC College, Cairo, Egypt [email protected] [email protected] (Received 20 February 2015, Received in final form 16 June 2015, Accepted 16 June 2015) This paper presents a new overlapped coilgun configuration to launch medium weight projectiles. The proposed configuration consists of a two-stage coilgun with overlapped coil covers with spacing between them. The theoretical operation of a multi-stage coilgun is introduced, and a transient simulation was conducted for projectile motion through the launcher by using a commercial transient finite element software, ANSOFT MAXWELL. The excitation circuit design for each coilgun is reported, and the results indicate that the overlapped configuration increased the exit velocity relative to a non-overlapped configuration. Different configurations in terms of the optimum length and switching time were attempted for the proposed structure, and all of these cases exhibited an increase in the exit velocity. The exit velocity tends to increase by 27.2% relative to that of a non-overlapped coilgun of the same length. Keywords : electromagnetic launch, excitation circuit, lorentz force, overlapped coilgun 1. Introduction is not easy to obtain the main performance parameters and optimize the design [3]. Electromagnetic (EM) launch technology is a strong Sandia National Laboratories has succeeded in coilgun candidate to launch objects with high velocities over long design and operations by developing four guns with distances. -

Amtrak SMP 28603 Mechanical Standards for Operating Privately
Amtrak Equipment Maintenance Department Standard Maintenance Procedure SMP NO.: 28603 ISSUE DATE: January 12, 1982 REVISION DATE: September 13, 2013 TITLE: Mechanical Standard for Operating Privately Owned Cars in Amtrak Trains EQUIPMENT TYPE MAINTENANCE TYPE All Passenger Trains L – Locomotive Locomotives Cars C – Cars All Locomotives All Cars X All Types C All Maintenance – L/C Acela HST Power Car Acela Baggage Daily – L/C AEM-7 Amfleet I Cafe 30 Day – C Cab Car: (Under Cars) Amfleet II Coach Quarterly –L/C Car Movers Auto Carrier Diner Semi-Annual – L/C Commuter Commuter Dinette Annual – L/C F59PHI Freight Lounge 720 Day – L GP38-3 Heritage HEP Sleeper COT&S – C GP15D Horizon Other: Initial Terminal – L/C HHP8 Material Handling Cars Intermediate Terminal – L/C MP15 X Private Cars Modification – L/C Non Powered Control Units Superliner I Overhaul – L/C P32-8 Superliner II Running Repair – L/C P32AC-DM Surfliner Seasonal – C P-40 Talgo Wheels – L/C P-42 Turboliner Facility SW1001 Viewliner Other: SW1200 X Other: Railroad Business Cars SW1500 Turboliner Talgo Other: 1.0 PURPOSE This document describes the Amtrak Mechanical Department requirements for the handling in Amtrak trains of privately owned passenger cars, as well as railroad-owned business cars of freight carriers which have an Amtrak operating agreement. For the purpose of this document, a passenger car is defined as a vehicle meeting Association of American Railroads (AAR) or American Public Transportation Association Standard S-034 for the construction of passenger equipment cars, or similar standard for older cars, for operation in passenger train service, and does not include caboose cars, freight cars, or maintenance of way equipment. -

Comparison of Helicopter Turboshaft Engines
Comparison of Helicopter Turboshaft Engines John Schenderlein1, and Tyler Clayton2 University of Colorado, Boulder, CO, 80304 Although they garnish less attention than their flashy jet cousins, turboshaft engines hold a specialized niche in the aviation industry. Built to be compact, efficient, and powerful, turboshafts have made modern helicopters and the feats they accomplish possible. First implemented in the 1950s, turboshaft geometry has gone largely unchanged, but advances in materials and axial flow technology have continued to drive higher power and efficiency from today's turboshafts. Similarly to the turbojet and fan industry, there are only a handful of big players in the market. The usual suspects - Pratt & Whitney, General Electric, and Rolls-Royce - have taken over most of the industry, but lesser known companies like Lycoming and Turbomeca still hold a footing in the Turboshaft world. Nomenclature shp = Shaft Horsepower SFC = Specific Fuel Consumption FPT = Free Power Turbine HPT = High Power Turbine Introduction & Background Turboshaft engines are very similar to a turboprop engine; in fact many turboshaft engines were created by modifying existing turboprop engines to fit the needs of the rotorcraft they propel. The most common use of turboshaft engines is in scenarios where high power and reliability are required within a small envelope of requirements for size and weight. Most helicopter, marine, and auxiliary power units applications take advantage of turboshaft configurations. In fact, the turboshaft plays a workhorse role in the aviation industry as much as it is does for industrial power generation. While conventional turbine jet propulsion is achieved through thrust generated by a hot and fast exhaust stream, turboshaft engines creates shaft power that drives one or more rotors on the vehicle. -

ELECTRICAL ENERGY UTLISATION Jacek F
ELECTRICAL ENERGY UTLISATION Jacek F. Gieras and Izabella A. Gieras Adam Marszalek Publishing House, Torun, 1998 This text evolved from notes used in teaching an undergraduate course Energy Utilisation at the University of Cape Town. As the curricula of electrical engineering programmes became more and more overcrowded, many electrical engineering departments decided to limit the number of compulsory courses in heavy current electrical engineering. As a result, the number of lectures in electrical machines and related subjects have been reduced. Under such circumstances students need a concise textbook which covers electrical motors with emphasis on their performance, selection and applications, characteristics of modern electrical drives including variable speed drives and the use of electrical energy in households. This textbook deals with fundamentals of electrical motors, drives, electrical traction and domestic use of electrical energy. It is intended to serve second or third year students taking a one-semester course in energy utilisation or electric power engineering. Transformers and electromechanical generators have been omitted as transformation and generation of electric power is usually covered by a parallel course in power systems. The textbook consists of seven chapters: 1. Energy and drives, 2. D.c. motors, 3. Three- phase induction motors, 4. Synchronous motors, 5. Variable-speed drives, 6. Electrical traction and 7. Domestic use of electrical energy. Chapter 7 also contains principles of illumination. For a one semester course and two lectures per week the authors recommend the first four chapters. For four lectures per week the authors recommend all seven chapters. Students using this textbook should have taken courses in circuit theory and electromagnetism as prerequisites. -

Industrial Linear Motors
Industrial Linear Motors Smart solutions are driven by PRODUCT OVERVIEW www.linmot.com Precision and dynamics In the products and in the everyday life of NTI AG, these values are inseparable. NTI AG NTI AG is a global manufacturer of high quality tubular style linear motors and linear motor systems and thus focuses on the development, production and distribution of linear direct drives for use in industrial environments. Founded in 1993 as an independent business unit of the Sulzer Group, NTI AG has been in operation since 2000 as an independent company. NTI AG headquarters are located in Spreitenbach, near Zurich in Switzerland. In addition to three production sites in Switzerland and Slovakia, NTI AG maintains a sales and support office LinMot® USA Inc. to cover the Americas. Mission The brands LinMot® for industrial linear motors and MagSpring® for magnetic springs are offered LinMot offers its customers a sophisticated and dedicated linear to customers worldwide. NTI AG drive system that can be easily integrated into all leading control maintains an experienced customer systems. A high degree of standardization, delivery from stock and consultant sales and support a worldwide distribution network insure the immediate availability network of over 80 locations and excellent customer support. worldwide. For the realization of linear motion Our aim is to push linear direct drive technology and make it a NTI AG is always a competent and standard machine design element. We offer highly efficient drive reliable partner. solutions that make a major contribution to the overall resource conservation effort. 2 3 Linear Motors Position and Temperature sensors Electronic nameplate Stator Winding Slider with Neodynium Magnets Payload Mounting LinMot linear motors employ a direct electromagnetic principle. -

Direct Torque Control of Induction Motors
DIRECT TORQUE CONTROL FOR INDUCTION MOTOR DRIVES MAIN FEATURES OF DTC · Decoupled control of torque and flux · Absence of mechanical transducers · Current regulator, PWM pulse generation, PI control of flux and torque and co-ordinate transformation are not required · Very simple control scheme and low computational time · Reduced parameter sensitivity BLOCK DIAGRAM OF DTC SCHEME + _ s* s j s + Djs _ Voltage Vector s * T + j s DT Selection _ T S S S s Stator a b c Torque j s s E Flux vs 2 Estimator Estimator 3 s is 2 i b i a 3 Induction Motor In principle the DTC method selects one of the six nonzero and two zero voltage vectors of the inverter on the basis of the instantaneous errors in torque and stator flux magnitude. MAIN TOPICS Þ Space vector representation Þ Fundamental concept of DTC Þ Rotor flux reference Þ Voltage vector selection criteria Þ Amplitude of flux and torque hysteresis band Þ Direct self control (DSC) Þ SVM applied to DTC Þ Flux estimation at low speed Þ Sensitivity to parameter variations and current sensor offsets Þ Conclusions INVERTER OUTPUT VOLTAGE VECTORS I Sw1 Sw3 Sw5 E a b c Sw2 Sw4 Sw6 Voltage-source inverter (VSI) For each possible switching configuration, the output voltages can be represented in terms of space vectors, according to the following equation æ 2p 4p ö s 2 j j v = ç v + v e 3 + v e 3 ÷ s ç a b c ÷ 3 è ø where va, vb and vc are phase voltages.