Intra-Urban Spatial Variability of Surface Ozone and Carbon Dioxide in Riverside, CA: Viability and Validation of Low-Cost Sensors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Model AIR 2000 Carbon Dioxide Sensors Consist of a Patented Solid State Infrared CO2 Monitor Housed in an Attractive Plastic Case
CARBON DIOXIDE (CO2 ) MODEL AIR2000/ INDOOR AIR QUALITY SENSOR (TOXCO2/ANA) GENERAL DESCRIPTION: Toxalert’s AIR 2000 Carbon Dioxide (CO2) sensors come with a linearized signal output capability of 0 to 10 VDC and 4 to 20 mA over its 0-2000ppm range (other ranges available). It has an accuracy of ± 5% of reading and a repeatability of ± 20ppm. Options available with the Air 2000 are a digital dis- play for reading CO2 concentration in ppm; relay output with field adjustable set point; and duct mounting hardware. The AIR 2000 may input directly to a Toxalert controller, interface directly to any standard direct digital controller (DDC); or be a stand-alone unit for the control of ventilation equipment. SENSING ELEMENT: Model AIR 2000 Carbon Dioxide sensors consist of a patented solid state infrared CO2 monitor housed in an attractive plastic case. The AIR 2000 has a new state-of-the-art lithium tantalite detector, updated digital electronics and unique auto-zero function. This results in very stable calibration and longer trouble-free operation in the field. The new IR source is more rugged, operated at 10X derated power and has life expectancy of 10 yrs. The new lithium tantalite detector enhances stability, has less ambient temperature sensitivity, and faster response AIR2000 SENSOR time. The AIR 2000 space sensor has louvers to allow free passage of air to the sensing cell inside. AIR 2000DM duct sensor has pedo tubes for drawing a sample from the ventilation duct. STANDARD FEATURES: • Relay option available • 10 year sensing element life • Optional duct mounted unit • Low voltage circuits • Interfaces directly to DDC systems • Linear 4 to 20 mA output or 0 to 10 vdc output • Other ranges available • Optional digital display TOXALERT INTERNATIONAL, INC. -
Toward a National System of Postsecondary Education in the Federated States of Micronesia
DOCUMENT RESUME ED 322 978 JC 900 480 AUTHOR Lerner, Max J.; Drier, Harry N. TITLE Toward a National System of Postsecondary Education in the Federated States of Micronesia. A Special Report on Postsecondary Education. INSTITUTION Ohio State Univ., Columbus. Center on Education and Training for Employment. SPONS AGENCY Micronesia Dept. of Human Resources, Palikir, Pohnpei. Office of Education. PUB DATE Jan 90 CONTRACT FSM-45 NOTE 59p. PUB TYPE Reports - Research/Technical (143) EDRS PRICE EF01/PC03 Plus Postage. DESCRIPTORS *Administrative Organization; Attitudes; College Role; *Community Colleges; *Educational Development; *Educational Improvement; *Financial Support; Higher Education; International Cooperation; Interviews; Program Descriptions; School Surveys; Teacher Education; Two Year Colleges IDENTIFIERS *Micronesia ABSTRACT In 1989 the Center on Education and Training for Employment at Ohio State University was asked by the government of the Federated States of Micronesia (FSM) to conduct a study on the postsecondary educational system within the FSM. During the course of the study, the survey team's postsecondary specialist visited community college campuses and centers for continuing education throughout the Pacific rim, including the Republic of the Marshall Islands, the FSK, and the Republic of Palau, the three nations which maintain a treaty operating the College of Micronesia's multi-campus sites. During these visits, over 102 people were interviewed, including college administrators, teachers, students, state government officials, national government officials, and and off-island educators. Areas examined by the study included financing of current postsecondary programs including community college funding, scholarships, and Pell grants. Also examined were interviewee concerns and observations regarding eight basic issues for the FSK, including the three nation treaty, college governance, the predominant role of foreigners in skilled occupations, the need for and financing of a four-year institution, and private sector economic development. -

Probes Facilitate Rollout of Environmentally Friendly Refrigeration
CO2 PROBES FACILITATE ROLLOUT OF ENVIRONMENTALLY FRIENDLY REFRIGERATION Supermarkets all over Australia and New Zealand are benefiting from advanced carbon dioxide monitors as new natural refrigeration systems are installed in the fight against climate change. Introduction Over the last 8 years, Vaisala carbon dioxide probes have been employed widely across Woolworths Group stores, delivering a The Woolworths Group employs over 205,000 staff and range of benefits and helping the group to achieve its strategic serves 900 million customers each year. As a large and goals. diverse organisation, Woolworths knows that its approach to sustainability has an impact on national economies, communities and environments, and this is reflected in the Group’s Corporate Global move to natural refrigerants Responsibility Strategy 2020. Synthetic refrigerant gases have been utilised in a wide variety The strategy is built around twenty key targets which cover of industries for many decades. However, Chlorofluorocarbons Woolworths’ engagement with customers, communities, supply (CFCs) caused damage to the ozone layer and were phased chain and team members, as well as its responsibility to minimise out following the Montreal Protocol in 1987. Production of the environmental impact of its operations. One of the twenty Hydrochlorofluorocarbons (HCFCs) then increased globally, commitments within the strategy is to innovate with natural because they are less harmful to stratospheric ozone. However, refrigerants and reduce refrigerant leakage in its stores by 15 per HCFCs are very powerful greenhouse gases so Hydrofluorocarbons cent (of carbon dioxide equivalent) below 2015 levels. (HFCs) became more popular. Nevertheless, most HCFCs and HFCs have a global warming potential (GWP) that is thousands of times Carbon dioxide (CO2) is commonly regarded as the ideal natural refrigerant. -

US5345830.Pdf
|||||I||||||||US005345830A United States Patent (19) 11 Patent Number: 5,345,830 Rogers et al. 45 Date of Patent: ck Sep. 13, 1994 54 FIRE FIGHTING TRAINER AND APPARATUS INCLUDING A OTHER PUBLICATIONS TEMPERATURE SENSOR "Fire Trainer T-2000” manual, AAI corporation, un dated. 75) Inventors: William Rogers, Hopatcong; James "Trainer Engineering Report for Advanced Fire Fight J. Ernst, Livingston; Steven ing Surface Ship Trainer', Austin Electronics, Jan. Williamson, Haledon; Dominick J. 1988 (excerpt). Musto, Middlesex, all of N.J. Primary Examiner-Hezron E. Williams 73) Assignee: Symtron Systems, Inc., Fair Lawn, Assistant Examiner-George M. Dombroske N.J. Attorney, Agent, or Firm-Richard T. Laughlin * Notice: The portion of the term of this patent 57 ABSTRACT subsequent to Jan. 8, 2008 has been A fire fighting trainer for use in training fire fighters is disclaimed. provided. The fire fighting trainer includes a structure (21) Appl. No.: 80,484 having a plurality of chambers having concrete or grat ing floors. Each chamber contains one or a series of real 22 Filed: Jun. 18, 1993 or simulated items, which are chosen from a group of items, such as furniture and fixtures and equipment. The Related U.S. Application Data trainer also includes a smoke generating system having 60 Division of Ser. No. 873,965, Apr. 24, 1992, Pat. No. a smoke generator having a smoke line with an outlet 5,233,869, which is a continuation of Ser. No. 625,210, for each chamber. The trainer also includes a propane Dec. 10, 1990, abandoned, which is a continuation-in gas flame generating system having at least one propane part of Ser. -

Sensor Suite Sensors Overview
Sensor Suite Sensors Overview Sensor Suite Sensors: Overview Sensor Suite Sensors enable OptiNet® to cost effectively monitor and control a breadth of environmental parameters throughout a facility. Located within a Sensor Suite, the sensors evaluate an array of environmental conditions using a shared sensing architecture. In lieu of locating individual discrete sensors in each space, OptiNet gathers air samples from the spaces and multiplexes them across the OptiNet network back to the Sensor Suite for analysis. OptiNet’s centralized sensor platform affords a more robust, cost effective approach to monitoring many parameters at many locations. A “virtual” sensor function is created as if the sensors were actually located in the environment being monitored. A shared platform additionally negates sensor errors through a true differential measurement (comparing outside to inside conditions via a common shared FEATURES sensor); while minimizing calibration and maintenance costs. • Sensor Suite Sensors are tailored to match specific monitoring and Sensor Suite Sensors have unique performance specifications and product features control needs. to meet specific applications, such as demand controlled ventilation, differential • Calibration and maintenance enthalpy economizer control; or for monitoring only purposes. The ability to sense of sensors is automatically and a variety of conditions, combined with a specific level of sensor performance, routinely scheduled through optimizes an application’s potential energy savings, control or monitoring capacity. Aircuity’s calibration depot and Assurance Services program. OptiNet’s Assurance Services plan assures that the sensors will continue to perform • Flexible architecture for future today, tomorrow, and in to the future. Aircuity’s Calibration Depot services routinely sensor enhancements and refresh all sensors within the Sensor Suite with factory calibrated and serviced units technology updates. -

Technical Specification
• 1.09.280E • 5.3.2007 © VALLOX Code 3486 SE TECHNICAL SPECIFICATION DIGIT SED ELECTRONIC CONTROLLER WITH LCD DISPLAY TECHNICAL SPECIFICATION • For dwelling-specific ventilation Input power 230 V, 50 Hz, 11 A in large detached houses (+ post-heating unit 4.3 A) • Supply and extract air ventilation Class of protection IP34 with heat recovery Fans alternating Extract air 300 W 1.31 A 205 dm3/s 100 Pa • Heat recovery efficiency of the 3 counter-current cell up to 80% current (AC) Supply air 300 W 1.31 A 185 dm /s 100 Pa Fans, direct Extract air 2 x 90 W 0.6 A 180 dm3/s 100 Pa • Electronic control panel with LCD display current (DC) Supply air 2 x 90 W 0.6 A 165 dm3/s 100 Pa • Week clock control as a standard feature Heat recovery Counter-current cell, > 80% • Humidity control (option) Heat recovery bypass Summer / winter automation • Carbon dioxide control (option) Electric preheating unit 2.0 kW 8.7 A • Maintenance reminder Electric post-heating unit (option) 1.0 kW 4.3 A • Fireplace / booster switch function Water post-heating radiator (option) ca 3 kW at the controller Filters Supply air G3, F7 • Silent operation Extract air G3 Weight / basic unit 146 kg • Good filtering Ventilation adjustment options – control via control panel • Summer / winter automation – CO2 and %RH control • Fixed air flow measuring outlets – remote monitoring control (LON converter) – remote monitoring control (voltage / current signal) Options – electric post-heating unit – water post-heating unit – CO2 sensor – %RH sensor – pressure difference switch – LON converter – Silencer TECHNICAL SPECIFICATION © VALLOX • We reserve the right to make changes without prior notification. -

City Sandy 3 Dor Tax District Number: 32860000
1 PLAN AREA NAME: CITY SANDY DOR PLAN AREA NUMBER 30008745 2 TAXING DISTRICT NAME: CITY SANDY 3 DOR TAX DISTRICT NUMBER: 32860000 COUNTY WHERE SHARED VALUE TOTAL SHARED 4 CLACKAMAS RESIDES VALUE 5 SHARED VALUE BY COUNTY 1,076,183,049 1,076,183,049 6 % OF TOTAL SHARED 100.0% 0.0% 0.0% 7 PLAN AREA CURRENT VALUE 163,961,072 8 PLAN AREA FROZEN VALUE 47,944,037 9 EXCESS VALUE USED 116,017,035 116,017,035 PERMANENT RATE LOCAL OPTION(S) "GAP" BONDS BONDS OUTSIDE TOTAL 10 DISTRICT BILLING RATE 4.1152 4.1152 11 AMT RATE WOULD RAISE (dot) 477,433.30 477,433.30 12 URBAN RENEWAL RATE (dot) 0.4436 0.4436 13 AMT UR RAISE CTY 1 477,394.80 477,394.80 14 AMT UR RAISE CTY 2 15 AMT UR RAISE CTY 3 16 TOT AMT ALL COUNTIES 477,394.80 477,394.80 17 AGENCY TRUNC LOSS 38.50 38.50 18 AMOUNT EXT CTY 1 477,394.80 477,394.80 19 AMOUNT EXT CTY 2 20 AMOUNT EXT CTY 3 21 TOTAL AMT EXTENDED 477,394.80 477,394.80 22 GAIN/LOSS EXT CTY 1 0.00 0.00 23 GAIN/LOSS EXT CTY 2 24 GAIN/LOSS EXT CTY 3 25 TOTAL GAIN/LOSS EXT 0.00 0.00 26 UR COMP LOSS CTY 1 206.77 206.77 27 UR COMP LOSS CTY 2 28 UR COMP LOSS CTY 3 29 TOTAL COMP LOSS 206.77 206.77 30 AMT IMPOSED CTY 1 477,188.03 477,188.03 31 AMT IMPOSED CTY 2 32 AMT IMPOSED CTY 3 33 TOTAL AMT IMPOSED 477,188.03 477,188.03 1 PLAN AREA NAME: CITY SANDY DOR PLAN AREA NUMBER 30008745 2 TAXING DISTRICT NAME: COMM COLL MT HOOD 3 DOR TAX DISTRICT NUMBER: 30608000 COUNTY WHERE SHARED VALUE TOTAL SHARED 4 CLACKAMAS RESIDES VALUE 5 SHARED VALUE BY COUNTY 1,076,183,049 1,076,183,049 6 % OF TOTAL SHARED 100.0% 0.0% 0.0% 7 PLAN AREA CURRENT VALUE -

Carbon Dioxide Sensors GG-VL2-CO2
VENT LINE GG-VL2-CO2 CARBON DIOXIDE SENSOR Key Features • Carbon dioxide-selective infrared sensor technology prevents false alarms • Continuous monitoring of refrigeration system relief valves • Rugged, long life, and low power catalytic-bead sensor • Designed for harsh environments (-40°F to +140°F) • Sensor and preamp in one assembly • 0-5% CO2 (0-50,000 ppm) detection range • Ability to detect “weeping valves” to prevent refrigerant loss over time Carbon Dioxide sensors Carbon Dioxide • Sensor housing allows for easy sensor replacement and calibration • 316 stainless steel 18 gauge enclosure • Industry standard 24 VDC, linear 4/20 mA output From unlikely high-pressure releases to the inevitable “weepers”, the CTI Vent Line sensor will notify you … before your neighbors do. The GG VL2 utilizes a rugged infrared High concentrations of carbon diox- The GG-VL2-CO2 provides an industry sensor technology for fast leak detec- ide gases in your vent line are usually standard linear 4/20 mA output signal tion and long life. The standard 0-5% indications of a leaking valve or system compatible with most gas detection CO2 detection range of the GG-VL2- overpressure. This could mean costly systems and PLCs. Expect long sensor CO2 provides real-time continuous repairs or plant downtime, not to men- life and no zero-signal drift over time. monitoring of carbon dioxide concen- tion loss of refrigerant and regulatory trations in your high-pressure relief fines. Early detection can save money vent header. while also protecting equipment, prod- uct, -

2016.03.28 CR4559 AMT Ambulance, Inc. V
Department of Health and Human Services DEPARTMENTAL APPEALS BOARD Civil Remedies Division AMT Ambulance, Inc. (NPI: 1295007904), Petitioner, v. Centers for Medicare & Medicaid Services. Docket No. C-14-1477 Decision No. CR4559 Date: March 28, 2016 DECISION The Medicare billing privileges of Petitioner, AMT Ambulance, Inc., are revoked pursuant to 42 C.F.R. § 424.535(a)(1)1 because Petitioner was not in compliance with Medicare enrollment requirements for a supplier of ambulance services. The effective date of the revocation is March 5, 2014, 30 days after a Medicare administrative contractor acting on behalf of the Centers for Medicare & Medicaid Services (CMS) notified Petitioner of the revocation. 42 C.F.R. § 424.535(g). CMS established a two year bar to Petitioner’s re-enrollment in the Medicare program. 42 C.F.R. § 424.545(c). _______________ 1 Citations are to the 2013 revision of the Code of Federal Regulations (C.F.R.), unless otherwise indicated. 2 I. Background Petitioner was enrolled in the Medicare program as a supplier2 of ambulance services, and operated only in Los Angeles County, California. Palmetto GBA, a Medicare administrative contractor, notified Petitioner on July 16, 2013, that Petitioner’s Medicare billing privileges were retroactively deactivated as of January 31, 2012. Petitioner (P.) Exhibit (Ex.) 4. On February 3, 2014, Noridian Healthcare Solutions (Noridian), the Medicare administrative contractor that replaced Palmetto GBA for certain functions, notified Petitioner that its Medicare billing privileges were retroactively revoked as of January 31, 2012. CMS Ex. 1 at 9. Noridian determined that Petitioner was “[n]ot in compliance with Medicare requirements,” citing 42 C.F.R. -

6 Cumulative and Growth Inducing Impacts
6 CUMULATIVE AND GROWTH INDUCING IMPACTS This section includes a detailed analysis of the cumulative impacts that would be anticipated with the proposed project with a specific focus on the project’s cumulative traffic impacts. In addition, this section includes a detailed discussion of the proposed project’s growth-inducing impacts, the project’s significant and irreversible commitment of resources, and the project’s effects on global climate change. 6.1 CUMULATIVE IMPACTS OF THE PROPOSED PROJECT This draft environmental impact report (Draft EIR) provides an analysis of overall cumulative impacts of the project taken together with other past, present, and probable future projects producing related impacts, as required by Section 15130 of the California Environmental Quality Act Guidelines (State CEQA Guidelines). The goal of such an exercise is twofold: first, to determine whether the overall long-term impacts of all such projects would be cumulatively significant; and second, to determine whether the Rocklin Crossings project itself would cause a “cumulatively considerable” (and thus significant) incremental contribution to any such cumulatively significant impacts. (See State CEQA Guidelines Sections 15130[a]-[b], Section 15355[b], Section 15064[h], Section 15065[c]; Communities for a Better Environment v. California Resources Agency [2002] 103 Ca1.App.4th 98, 120.) In other words, the required analysis intends to first create a broad context in which to assess the project’s incremental contribution to anticipated cumulative impacts, viewed on a geographic scale well beyond the project site itself, and then to determine whether the project’s incremental contribution to any significant cumulative impacts from all projects is itself significant (i.e., “cumulatively considerable” in CEQA parlance). -

Autoridades Nacionales Competentes En Materia De Productos Cosméticos
13.11.2004 ES Diario Oficial de la Unión Europea C 278/9 Autoridades nacionales competentes en materia de productos cosméticos (2004/C 278/03) De conformidad con el artículo 10 de la Directiva 95/17/CE de la Comisión, de 19 de junio de 1995, por la que se establecen las disposiciones de aplicación de la Directiva 76/768/CEE del Consejo en lo relativo a la exclusión de uno o varios ingredientes de la lista prevista para el etiquetado de productos cosméticos, la lista de las autoridades nacionales competentes es la siguiente: AUSTRIA FINLAND Bundesministerium für Gesundheit und Frauen Kuluttajavirasto Sektion IV Haapaniemenkatu 4 A Radetzkystr. 2 PL 5 A-1030 Wien FI-00531 Helsinki Contact: — Dr. Amire Mahmood Phone: +43 1 71100 4741 FRANCE Fax: +43 1 71100 4681 E-mail: [email protected] Direction Générale de la Concurrence, de la Consomma- — Dr Alexander Zilberszac tion et de la Répression des fraudes Phone: +43 1 71100 4617 Bureau E1, Santé Fax: +43 1 71379 52 Télédoc 241 E-mail: [email protected] 59, boulevard Vincent Auriol F-75703 Paris Cedex 13 Phone: +33 1 44 97 29 24/29 25 Fax: +33 1 44 97 23 30 BELGIUM Service Fédéral de Santé Publique, Sécurité de la Chaîne GERMANY Alimentaire et Environnement Direction générale Animaux, Végétaux et Alimentation Verzeichnis von zuständigen Behörden, die eine Division Denrées Alimentaires et autres produits de Consom- Ausnahme von der Etikettierungspflicht genehmigen mation können Cité administrative de l'Etat Quartier Arcades 4ème étage B-1010 Bruxelles 1. Land Baden – Württemberg Phone: +32 2 210 48 43 Fax: +32 2 210 48 16 Regierungsbezirk Stuttgart CZECH REPUBLIC Landratsamt Böblingen Veterinär- und Lebensmittelüberwachungsamt Ministry of Health of the Czech Republic Parkstr. -
Answers to Four Questions About Carbon Dioxide Sensor Self-Heating
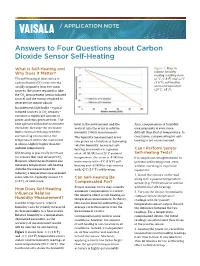
/ APPLICATION NOTE Answers to Four Questions about Carbon Dioxide Sensor Self-Heating What Is Self-Heating and Figure 1: Error in relative humidity Why Does It Matter? reading resulting from The self-heating of electronics in +1°C (1.8°F) and +2°C (3.6°F) self-heating carbon dioxide (CO2) instruments usually originates from two main at room temperature sources: the power required to take (20°C, 68°F). the CO2 measurement (sensor infrared source) and the energy required to generate the output signals. Incandescent light bulbs – typical infrared sources in CO2 sensors – consume a significant amount of power and thus generate heat. The heat spreads within the instrument level in the environment and the Also, compensation of humidity enclosure. Because the enclosure vertical axis the error in relative measurements is even more limits thermal exchange with the humidity (%RH) measurement. difficult than that of temperature. In surrounding environment, the The humidity measurement error conclusion, compensating for self- temperature within the instrument rate grows as a function of increasing heating is not recommended. is always slightly higher than the relative humidity. Increased self- ambient temperature. heating also results in a greater Can I Perform Sensor Self-heating is practically irrelevant error. At 50%RH and 20°C ambient Self-Heating Tests? for sensors that only measure CO2. temperature, the error is -3%RH for It is simple and straightforward to However, when the instrument also instruments with +1°C (1.8°F) self- perform self-heating tests, even measures temperature, self-heating heating and -6%RH for instruments without investing in expensive disturbs the measurement by with +2°C (3.6°F) self-heating.