9. DC-DC Converters (DC –Choppers)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Power Electronics
Power Electronics Learning outcomes After completion of the chapter 1, students will be able to: Describe the construction, working principles of SCR, methods of SCR triggering, SCR specifications VI characteristics of SCR , TRIAC , UJT, DIAC Chapter 1 1. Introduction Thyristor is a unidirectional device, that is it will only conduct current in one direction only, but unlike a diode, the thyristor can be made to operate as either an open-circuit switch or as a rectifying diode depending upon how the thyristors gate is triggered. A thyristor is a solid-state semiconductor device with four layers of alternating P- and N-type materials. It acts exclusively as a bistable switch, conducting when the gate receives a current trigger, and continuing to conduct until the voltage across the device is reversed biased, or until the voltage is removed Silicon Controlled Rectifier (SCR) • The silicon controlled rectifier ( SCR ) is a three terminal semiconductor switching device which can be used asa controlled switch to perform various functions such as rectification, inversion and regulation of power flow. • An SCR can handle currents upto several thousand amperes and voltages upto more than 1kV. • The SCR has appeared in the market under different names such as thyristor, thyrode transistor. • Like the diode, SCR is a unidirectional device,i.e. it will only conduct current in one direction only, but unlike a diode, the SCR can be made to operate as either an open-circuit switch or as a rectifying diode depending upon how its gate is triggered. • In other words, SCR can operate only in the switching mode and cannot be used for amplification. -

Inverters and Choppers
TECHNOLOGY POWER ELECTRONICS TECHNOLOGY Inverters and Choppers Technology creates change. The Chopper The ability to evolve along Technology® in the with change is what Ranger® 305D offers distinguishes a successful the same control over the welding arc as an product from the rest. inverter machine Power source design is almost entirely devoted The inverter technology in the Invertec® V350-PRO to reliability. Fast power gives it equivalent power conversion is important to capabilities as a obtaining a smooth conventional welding output, but we transformer/rectifier also know that speed is such as the Lincoln CV-305, but in inconsequential without a much smaller and reliability. No matter how portable machine. fast your machine operates, if it is not durable, then it is not usable for welding. And if it is not welding, you are not meeting your production goals and making a living. QUICKER RESPONSE High-speed power conversion allows for quick response to changing arc conditions. SMALLER FOOTPRINT Power electronic components are compact, making equipment size smaller and therefore more portable. UNIVERSAL INPUT VOLTAGE Capable of operating from 208 to 575 volts on virtually any power supply for versatile, consistent performance. HIGHLY EFFICIENT Smaller transformer coils, higher thermal conductivity, and higher operating frequencies means more efficient output power, and more economical use of power. This translates to decreased utility costs and increased power source efficiency. WAVEFORM CONTROL TECHNOLOGY® COMPATIBLE Waveform Control Technology® gives the operator improved control over the characteristics of the welding arc. The future of welding is here.® NX-1.30 6/06 POWER ELECTRONICS TECHNOLOGY TECHNOLOGY Inverter Technology 2/8 What is Inverter Technology Inverter Technology? Inverter-based welding power sources operate at frequencies above 20 kHz, whereas traditional power sources operate at a line frequency of 50 or 60 Hz. -
Chapter 4: DC-DC Conversion: DC Choppers
CHAPTER FOUR DC-DC CONVERSION: DC CHOPPERS 4.1 INTRODUCTION A dc-to‐dc converter, also known as d.c. chopper, is a static device which is used to obtain a variable d.c. voltage from a constant d.c. voltage source. Also the dc-to-dc converter is defined in more general way as an electrical circuit that transfers energy from a d.c. voltage source to a load. The energy is first transferred via power electronic switches to energy storage devices and then subsequently switched from storage into the load. The switches used are GTO, IGBT, Power BJT, and Power MOSFET for low power application and thyristors or SCRs for high power application. The storage devices are inductors and capacitors. The power source is either a battery (d.c. volt) or a rectified a.c. volt. This process of energy transfer results in an output voltage that is related to the input voltage by the duty ratios of the switches. The dc-to-dc converter products are used extensively for divers applications in the healthcare (bio-life science, dental, imaging, labor- atory, medical), communications, computing, storage, business systems, test and measurement, instrumentation, and industrial equipment industries. They are used in electric motor drives, in switch mode power supplies (SMPS), trolley cars, battery operated vehicles, traction motor control, control of large number of d.c. motors, etc. They are also used as d.c. voltage regulators. Types of dc-to-dc converters There are mainly two types of dc-to-dc converters: (1) Step‐down choppers, and (2) Step‐up choppers. -

DC Power Electronics
Electricity and New Energy DC Power Electronics Courseware Sample 86356-F0 Order no.: 86356-10 Revision level: 12/2014 By the staff of Festo Didactic © Festo Didactic Ltée/Ltd, Quebec, Canada 2010 Internet: www.festo-didactic.com e-mail: [email protected] Printed in Canada All rights reserved ISBN 978-2-89640-395-0 (Printed version) ISBN 978-2-89747-237-5 (CD-ROM) Legal Deposit – Bibliothèque et Archives nationales du Québec, 2010 Legal Deposit – Library and Archives Canada, 2010 The purchaser shall receive a single right of use which is non-exclusive, non-time-limited and limited geographically to use at the purchaser's site/location as follows. The purchaser shall be entitled to use the work to train his/her staff at the purchaser's site/location and shall also be entitled to use parts of the copyright material as the basis for the production of his/her own training documentation for the training of his/her staff at the purchaser's site/location with acknowledgement of source and to make copies for this purpose. In the case of schools/technical colleges, training centers, and universities, the right of use shall also include use by school and college students and trainees at the purchaser's site/location for teaching purposes. The right of use shall in all cases exclude the right to publish the copyright material or to make this available for use on intranet, Internet and LMS platforms and databases such as Moodle, which allow access by a wide variety of users, including those outside of the purchaser's site/location. -
High-Frequency Power Transformers
Electricity and New Energy High-Frequency Power Transformers Courseware Sample 86378-F0 Order no.: 86378-10 First Edition Revision level: 11/2014 By the staff of Festo Didactic © Festo Didactic Ltée/Ltd, Quebec, Canada 2011 Internet: www.festo-didactic.com e-mail: [email protected] Printed in Canada All rights reserved ISBN 978-2-89640-543-5 (Printed version) ISBN 978-2-89640-797-2 (CD-ROM) Legal Deposit – Bibliothèque et Archives nationales du Québec, 2011 Legal Deposit – Library and Archives Canada, 2011 The purchaser shall receive a single right of use which is non-exclusive, non-time-limited and limited geographically to use at the purchaser's site/location as follows. The purchaser shall be entitled to use the work to train his/her staff at the purchaser's site/location and shall also be entitled to use parts of the copyright material as the basis for the production of his/her own training documentation for the training of his/her staff at the purchaser's site/location with acknowledgement of source and to make copies for this purpose. In the case of schools/technical colleges, training centers, and universities, the right of use shall also include use by school and college students and trainees at the purchaser's site/location for teaching purposes. The right of use shall in all cases exclude the right to publish the copyright material or to make this available for use on intranet, Internet and LMS platforms and databases such as Moodle, which allow access by a wide variety of users, including those outside of the purchaser's site/location. -

Analysis and Simulation of Mechanical Trains Driven By
ANALYSIS AND SIMULATION OF MECHANICAL TRAINS DRIVEN BY VARIABLE FREQUENCY DRIVE SYSTEMS A Thesis by XU HAN Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE December 2010 Major Subject: Mechanical Engineering ANALYSIS AND SIMULATION OF MECHANICAL TRAINS DRIVEN BY VARIABLE FREQUENCY DRIVE SYSTEMS A Thesis by XU HAN Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Approved by: Chair of Committee, Alan B. Palazzolo Committee Members, Won-jong Kim Hamid A. Toliyat Head of Department, Dennis O'Neal December 2010 Major Subject: Mechanical Engineering iii ABSTRACT Analysis and Simulation of Mechanical Trains Driven by Variable Frequency Drive Systems. (December 2010) Xu Han, B.S., Zhejiang University, P.R.China Chair of Advisory Committee: Dr. Alan B. Palazzolo Induction motors and Variable Frequency Drives (VFDs) are widely used in in- dustry to drive machinery trains. However, some mechanical trains driven by VFD- motor systems have encountered torsional vibration problems. This vibration can induce large stresses on shafts and couplings, and reduce the lifetime of these me- chanical parts. Long before the designed lifetime, the mechanical train may encounter failure. This thesis focuses on VFDs with voltage source rectifiers for squirrel-cage induction motors of open-loop Volts/Hertz and closed-loop Field Oriented Control (FOC). First, the torsional vibration problems induced by VFDs are introduced. Then, the mathematical model for a squirrel-cage induction motor is given. -
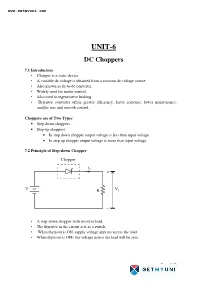
UNIT-6 DC Choppers
www.getmyuni.com UNIT-6 DC Choppers 7.1 Introduction • Chopper is a static device. • A variable dc voltage is obtained from a constant dc voltage source. • Also known as dc-to-dc converter. • Widely used for motor control. • Also used in regenerative braking. • Thyristor converter offers greater efficiency, faster response, lower maintenance, smaller size and smooth control. Choppers are of Two Types • Step-down choppers. • Step-up choppers. • In step down chopper output voltage is less than input voltage. • In step up chopper output voltage is more than input voltage. 7.2 Principle of Step-down Chopper Chopper i0 + V R V0 − • A step-down chopper with resistive load. • The thyristor in the circuit acts as a switch. • When thyristor is ON, supply voltage appears across the load • When thyristor is OFF, the voltage across the load will be zero. Page 168 www.getmyuni.com v0 V Vdc t tON tOFF i0 V/R Idc t T VAdc = verage value of output or load voltage. IAdc = verage value of output or load current. tON = Time interval for which SCR conducts. tOFF = Time interval for which SCR is OFF. T= tON + t OFF = Period of switching or chopping period. 1 f = = Freq. of chopper switching or chopping freq. T Average Output Voltage t VV= ON dc tON+ t OFF tON Vdc = V = V. d T t but ON = d = duty cycle t Average Output Current V I = dc dc R VVtON Idc = = d RTR RMS value of output voltage tON 1 2 VO= ∫ v o dt T 0 But during t, v= V ON o Therefore RMS output voltage t ON 1 2 VO = ∫ V dt T 0 2 V tON VO= t ON = . -

Abrasion 298, 307, 310, 316 ABS 217 AC Chopper Converter 146 AC
Index abrasion 298, 307, 310, 316 BLDC motor 104, 105, 132, 147, 148, ABS 217 152 AC chopper converter 146 blocking force 262,281 AC commutator motor 93 Bode-diagram 165 AC induction motor 146 boost converter 61 AC magnet 141 bootstrap driver 42 AC motor 113, 115, 126, 216 brake 312, 316 achievable accuracy 177 breakdown field 82 active vibration absorber 16 breakdown voltage 24, 36 active-clamping circuit 51 breakthrough voltage 22, 25 adaptive control, AC 4 Bridgman method 278 adaptronics 5, 6 brushes 92,94 air-gap windings 91 Buck-topology 61 AlNiCo magnet 96 amplification system 15 canned motor 128 amplified piezo actuator 266 capacitor 118 analogue amplifier 271 capacitor AC motor 120 anti-lock braking system 177, 217 cascade-circuit 113 application areas 20 charge control 270, 277 asynchronous point-to-point controls charge pump 44, 80 206 cheap motors 86 axial piston motor 181 chopper 93, 98 clamping force 262 backdrop 227 class-A amplifier 272 backward brush shift 92 class-C amplifier 272 Baker clamp 26 classification of drive circuits 38 BCD technology 80 claw-pole construction 152 bell-rotor 97 claw-pole principle 104 bell-type motor 95 claw-pole stator 128 bending element 264 claw-pole type 131 bi-metallic actuator 234 close-loop position control 114 bimetal effect 320 closed loop control 4, 85, 237 bimetals 6 clutch 312, 317 Bingham body 293, 307 collocation 8 Bingham model 295 commutator 92 bipolar connection 106, 137 compensation filter 11, 13 bipolar power transistors 24 complementary drive stage 39 bipolar transistor 21 -

One-Quadrant Switched-Mode Power Converters
Published by CERN in the Proceedings of the CAS-CERN Accelerator School: Power Converters, Baden, Switzerland, 7–14 May 2014, edited by R. Bailey, CERN-2015-003 (CERN, Geneva, 2015) One-Quadrant Switched-Mode Power Converters R. Petrocelli ALBA Synchrotron, Barcelona, Spain Abstract This article presents the main topics related to one-quadrant power convert- ers. The basic topologies are analysed and a simple methodology to obtain the steady-state output–input voltage ratio is set out. A short discussion of dif- ferent methods to control one-quadrant power converters is presented. Some of the reported derived topologies of one-quadrant power converters are also considered. Some topics related to one-quadrant power converters such as syn- chronous rectification, hard and soft commutation, and interleaved converters are discussed. Finally, a brief introduction to resonant converters is given. Keywords One-quadrant; converter; topology; switch-mode; magnet; energy. 1 Introduction Switched-mode power converters are a very efficient way to transfer energy from a source to a load. A switched-mode power converter is formed from switches, inductors, and capacitors. If these components are ideal, they do not dissipate energy, and the efficiency of the power converter is 100%. A further advantage of switched-mode power converters is the increase in power density that has occurred in recent years. The power density is defined as the ratio between the nominal power of the converter and its volume. This power density has been constantly increasing owing to an increasing switching frequency. As this is a broad topic, there are several different ways to classify switched-mode power convert- ers. -

9. DC-DC Converters (DC –Choppers)
Power Electronics Lecture No.9 Dr.Mohammed Tawfeeq 9. DC-DC Converters (DC –Choppers) A dc‐to‐dc converter, also known as dc chopper, is a static device which is used to obtain a variable dc voltage from a constant dc voltage source. Choppers are widely used in trolley cars, battery operated vehicles, traction motor control, control of large number of dc motors, etc….. They are also used as dc voltage regulators. Choppers are of two types: (1) Step‐down choppers, and (2) Step‐up choppers. In step‐down choppers, the output voltage will be less than the input voltage, whereas in step‐up choppers output voltage will be more than the input voltage. 9.1 PRINCIPLE OF STEP‐DOWN CHOPPER Figure 9.1 shows a step‐down chopper with resistive load. The thyristor in the circuit acts as a switch. When thyristor is ON, supply voltage appears across the load and when thyristor is OFF, the voltage across the load will be zero. The output voltage waveform is as shown in Fig. 9.2. Fig.9.1 Chopper circuit. Fig.9.2 Chopper output voltage waveform, R- load. 1 Power Electronics Lecture No.9 Dr.Mohammed Tawfeeq Methods of Control The output dc voltage can be varied by the following methods. Pulse width modulation control or constant frequency operation. Variable frequency control. Pulse Width Modulation tON is varied keeping chopping frequency ‘f’ & chopping period ‘T’ constant. Output voltage is varied by varying the ON time tON 9.2 ANALYSIS OF A STEP‐DOWN CHOPPER WITH R- LOAD Referring to Fig.9.2, the average output voltage can be found as Let T= control period = ton + toff Maximum value of γ =1 when ton =T (toff= 0) Minimum value of γ = 0 when ton = 0 (toff = 0) The output voltage is stepped down by the factor γ (0 ≤ Vo ≤ Vd ) .Therefore this form of chopper is a step down chopper. -

Courseware Sample
Electric Power / Controls Courseware Sample 85822-F0 A ELECTRIC POWER / CONTROLS COURSEWARE SAMPLE by the Staff of Lab-Volt Ltd. Copyright © 2009 Lab-Volt Ltd. All rights reserved. No part of this publication may be reproduced, in any form or by any means, without the prior written permission of Lab-Volt Ltd. Printed in Canada October 2009 Table of Contents Introduction ................................................... V Courseware Outline Asynchronous and Doubly-Fed Generators ........................ VII Sample Exercise Extracted from Asynchronous and Doubly-Fed Generators Exercise 3-9 The Boost Chopper ...............................3 Instructor Guide Sample Exercise Extracted from Asynchronous and Doubly-Fed Generators Exercise 3-11 The Four-Quadrant Chopper .......................17 Bibliography III IV Introduction The Lab-Volt Asynchronous and Doubly-Fed Generators system, model 8052-1, introduces the principles of electrical power generation and control in the field of wind turbines. Known as the standard for technical training systems in use across virtually every industry and around the globe, Lab-Volt is now using its expertise to facilitate the development, production, installation, and maintenance of the widest variety of Alternative and Renewable Energy Power Training Systems. While most power generation requires the creation, management, and conversion of heat energy into motion—with most variations simply involving the way heat is produced—alternative and renewable sources are far more varied. Many take advantage of the motion already found in nature; others harness nature’s own renewable forms of heat and energy. Capturing and converting that motion or energy often requires very non-traditional methods. Accustomed to breaking down processes and procedures into elemental blocks, Lab-Volt’s new training systems take the esoteric and theoretical out of the laboratory and translate it into apparatus that introduce practical, understandable teaching methods. -

Design and Implementation of Switched Mode Power Supply Using Pwm Concepts
DESIGN AND IMPLEMENTATION OF SWITCHED MODE POWER SUPPLY USING PWM CONCEPTS A Thesis Submitted in Partial fulfillment of the requirements for the degree of Bachelor of Technology In Electronics and Instrumentation Engineering By Sarika Tripathi Roll no.-10607021 GUIDED AND APPROVED BY: Prof. Dr. K. K. Mahapatra At Department of Electronics & Communication Engineering National Institute of Technology Rourkela May 2010 1 National Institute of Technology Rourkela CERTIFICATE This is to certify that the thesis titled “Design of SMPS Converter using PWM Feedback Mechanism”, submitted by Miss Sarika Tripathi (Roll No.- 10607021) in partial fulfillment of the requirements for the award of Bachelor of Technology Degree in Electronics and Instrumentation Engineering at National Institute of Technology, Rourkela (Deemed University) is an authentic work carried out by her under my supervision and guidance. To the best of my knowledge, the matter embodied in the thesis has not been submitted to any other University/ Institute for the award of any Degree or Diploma. Date: Prof. Dr. K. K. Mahapatra Department of E.C.E National Institute of Technology Rourkela - 769008 2 ACKNOWLEDGEMENT Foremost I wish to thank Prof. S. K. Patra, Head of Department, Electronics and Communication at NIT Rourkela, for providing appropriate learning atmosphere and laboratory with proper facilities in the department, without which this project couldn’t have been developed. I am extremely grateful to my guide Prof. Dr. K. K. Mahapatra, Professor, Department of Electronics and communication at National Institute of Technology Rourkela, for his revered guidance and supervision, which led to the completion of this Project. He was always there to help, providing me with all the necessary resources and guidance which helped in successful completion of this project work.