Mechanisms of Navigation in Fiddler Crabs: an Analysis of Allocentric and Egocentric Contributions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Φ-Features in Animal Cognition
φ-Features in Animal Cognition Chris Golston This paper argues that the core φ-features behind grammatical person, number, and gender are widely used in animal cognition and are in no way limited to humans or to communication. Based on this, it is hypothesized (i) that the semantics behind φ-features were fixed long before primates evolved, (ii) that most go back as far as far as vertebrates, and (iii) that some are shared with insects and plants. Keywords: animal cognition; gender; number; person 1. Introduction Bickerton claims that language is ill understood as a communication system: [F]or most of us, language seems primarily, or even exclusively, to be a means of communication. But it is not even primarily a means of communication. Rather, it is a system of representation, a means for sorting and manipulating the plethora of information that deluges us throughout our waking life. (Bickerton 1990: 5) As Berwick & Chomsky (2016: 102) put it recently “language is fundamentally a system of thought”. Since much of our system of representation seems to be shared with other animals, it has been argued that we should “search for the ancestry of language not in prior systems of animal communication, but in prior representational systems” (Bickerton 1990: 23). In support of this, I provide evidence that all the major φ-features are shared with primates, most with vertebrates, and some with plants; and that there are no φ-features whose semantics are unique to humans. Specifically human categories, including all things that vary across human cultures, seem to I’d like to thank Steve Adisasmito-Smith, Charles Ettner, Sean Fulop, Steven Moran, Nadine Müller, three anonymous reviewers for EvoLang, two anonymous reviewers for Biolinguistics and Kleanthes Grohmann for help in identifying weakness in earlier drafts, as well as audiences at California State University Fresno, Marburg Universität, and Universitetet i Tromsø for helpful discussion. -
The Fiddler Crab Claw-Waving Display
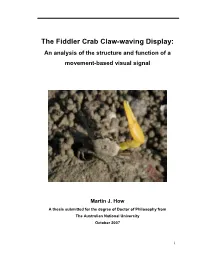
The Fiddler Crab Claw-waving Display: An analysis of the structure and function of a movement-based visual signal Martin J. How A thesis submitted for the degree of Doctor of Philosophy from The Australian National University October 2007 i Title page: Photograph of a male Uca mjoebergi in mid-wave. ii Declaration This thesis is an account of research undertaken between March 2004 and September 2007 at the Research School of Biological Sciences, The Australian National University, Canberra, Australia. Except where acknowledged in the customary manner, the material presented in this thesis is, to the best of my knowledge, original and has not been submitted in whole or in part for a degree in any other university. I am the senior author and the principal contributor to all aspects of the co-authored papers within. ……………………………………… Martin J. How iii iv Abstract Communication is an essential component of animal social systems and a diverse suite of signals can be found in the natural environment. An area of animal communication that, for technical reasons, we know very little about is the field of ‘movement-based’ or ‘dynamic’ visual signals. In this thesis, I make use of recent advances in measurement and analysis techniques, including digital video and image motion processing tools, to improve our understanding of how movement-based signals are adjusted according to signalling context. I measured and characterised the flamboyant claw-waving displays of male fiddler crabs (Genus Uca ) and made use of their transparent lifestyle to record the behavioural contexts in which these signals are produced The claw-waving displays of seven Australian species of fiddler crab are compared and contrasted to show that these signals are species-specific, but also vary within and between individuals. -

Diversity and Life-Cycle Analysis of Pacific Ocean Zooplankton by Video Microscopy and DNA Barcoding: Crustacea
Journal of Aquaculture & Marine Biology Research Article Open Access Diversity and life-cycle analysis of Pacific Ocean zooplankton by video microscopy and DNA barcoding: Crustacea Abstract Volume 10 Issue 3 - 2021 Determining the DNA sequencing of a small element in the mitochondrial DNA (DNA Peter Bryant,1 Timothy Arehart2 barcoding) makes it possible to easily identify individuals of different larval stages of 1Department of Developmental and Cell Biology, University of marine crustaceans without the need for laboratory rearing. It can also be used to construct California, USA taxonomic trees, although it is not yet clear to what extent this barcode-based taxonomy 2Crystal Cove Conservancy, Newport Coast, CA, USA reflects more traditional morphological or molecular taxonomy. Collections of zooplankton were made using conventional plankton nets in Newport Bay and the Pacific Ocean near Correspondence: Peter Bryant, Department of Newport Beach, California (Lat. 33.628342, Long. -117.927933) between May 2013 and Developmental and Cell Biology, University of California, USA, January 2020, and individual crustacean specimens were documented by video microscopy. Email Adult crustaceans were collected from solid substrates in the same areas. Specimens were preserved in ethanol and sent to the Canadian Centre for DNA Barcoding at the Received: June 03, 2021 | Published: July 26, 2021 University of Guelph, Ontario, Canada for sequencing of the COI DNA barcode. From 1042 specimens, 544 COI sequences were obtained falling into 199 Barcode Identification Numbers (BINs), of which 76 correspond to recognized species. For 15 species of decapods (Loxorhynchus grandis, Pelia tumida, Pugettia dalli, Metacarcinus anthonyi, Metacarcinus gracilis, Pachygrapsus crassipes, Pleuroncodes planipes, Lophopanopeus sp., Pinnixa franciscana, Pinnixa tubicola, Pagurus longicarpus, Petrolisthes cabrilloi, Portunus xantusii, Hemigrapsus oregonensis, Heptacarpus brevirostris), DNA barcoding allowed the matching of different life-cycle stages (zoea, megalops, adult). -

Salt Marsh Food Web a Food Chain Shows How Each Living Thing Gets Its Food
North Carolina Aquariums Education Section Salt Marsh Food Web A food chain shows how each living thing gets its food. Some animals eat plants and some animals eat other animals. For example, a simple food chain links the plants, snails (that eats the plants), and the birds (that eat the snails). Each link in this chain is food for the next link. Food Webs are networks of several food chains. They show how plants and animals are connected in many ways to help them all survive. Below are some helpful terms associated with food chains and food webs. Helpful Terms Ecosystem- is a community of living and non-living things that work together. Producers- are plants that make their own food or energy. Consumers-are animals, since they are unable to produce their own food, they must consume (eat) plants or animals or both. There are three types of consumers: Herbivores-are animals that eat only plants. Carnivores- are animals that eat other animals. Omnivores- are animals that eat both plants and animals. Decomposers-are bacteria or fungi which feed on decaying matter. They are very important for any ecosystem. If they weren't in the ecosystem, the plants would not get essential nutrients, and dead matter and waste would pile up. Salt Marsh Food Web Activities The salt marsh houses many different plants and animals that eat each other, which is an intricately woven web of producers, consumers, and decomposers. Consumers usually eat more than one type of food, and they may be eaten by many other consumers. This means that several food chains become connected together to form a food web. -

Individual Versus Collective Cognition in Social Insects
Individual versus collective cognition in social insects Ofer Feinermanᴥ, Amos Kormanˠ ᴥ Department of Physics of Complex Systems, Weizmann Institute of Science, 7610001, Rehovot, Israel. Email: [email protected] ˠ Institut de Recherche en Informatique Fondamentale (IRIF), CNRS and University Paris Diderot, 75013, Paris, France. Email: [email protected] Abstract The concerted responses of eusocial insects to environmental stimuli are often referred to as collective cognition on the level of the colony.To achieve collective cognitiona group can draw on two different sources: individual cognitionand the connectivity between individuals.Computation in neural-networks, for example,is attributedmore tosophisticated communication schemes than to the complexity of individual neurons. The case of social insects, however, can be expected to differ. This is since individual insects are cognitively capable units that are often able to process information that is directly relevant at the level of the colony.Furthermore, involved communication patterns seem difficult to implement in a group of insects since these lack clear network structure.This review discusses links between the cognition of an individual insect and that of the colony. We provide examples for collective cognition whose sources span the full spectrum between amplification of individual insect cognition and emergent group-level processes. Introduction The individuals that make up a social insect colony are so tightly knit that they are often regarded as a single super-organism(Wilson and Hölldobler, 2009). This point of view seems to go far beyond a simple metaphor(Gillooly et al., 2010)and encompasses aspects of the colony that are analogous to cell differentiation(Emerson, 1939), metabolic rates(Hou et al., 2010; Waters et al., 2010), nutrient regulation(Behmer, 2009),thermoregulation(Jones, 2004; Starks et al., 2000), gas exchange(King et al., 2015), and more. -

Andy Clark and His Critics
Andy Clark and His Critics E D I T E D BY MATTEO COLOMBO ELIZABETH IRVINE and MOG STAPLETON 1 1 Oxford University Press is a department of the University of Oxford. It furthers the University’s objective of excellence in research, scholarship, and education by publishing worldwide. Oxford is a registered trade mark of Oxford University Press in the UK and certain other countries. Published in the United States of America by Oxford University Press 198 Madison Avenue, New York, NY 10016, United States of America. © Oxford University Press 2019 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, without the prior permission in writing of Oxford University Press, or as expressly permitted by law, by license, or under terms agreed with the appropriate reproduction rights organization. Inquiries concerning reproduction outside the scope of the above should be sent to the Rights Department, Oxford University Press, at the address above. You must not circulate this work in any other form and you must impose this same condition on any acquirer. CIP data is on file at the Library of Congress ISBN 978– 0– 19– 066281– 3 9 8 7 6 5 4 3 2 1 Printed by Sheridan Books, Inc., United States of America CONTENTS Foreword ix Daniel C. Dennett Acknowledgements xi List of Contributors xiii Introduction 1 Matteo Colombo, Liz Irvine, and Mog Stapleton PART 1 EXTENSIONS AND ALTERATIONS 1. Extended Cognition and Extended Consciousness 9 David J. Chalmers 2. The Elusive Extended Mind: Extended Information Processing Doesn’t Equal Extended Mind 21 Fred Adams 3. -
Magnetic and Celestial Orientation of Migrating European Glass Eels
Magnetic and Celestial Orientation of Migrating European Glass Eels (Anguilla anguilla) Cresci, Alessandro https://scholarship.miami.edu/view/delivery/01UOML_INST/12356199980002976 Cresci, A. (2020). Magnetic and Celestial Orientation of Migrating European Glass Eels (Anguilla anguilla) (University of Miami). Retrieved from https://scholarship.miami.edu/discovery/fulldisplay/alma991031453189802976/01U OML_INST:ResearchRepository Open 2020/05/11 19:16:33 UNIVERSITY OF MIAMI MAGNETIC AND CELESTIAL ORIENTATION OF MIGRATING EUROPEAN GLASS EELS (ANGUILLA ANGUILLA) By Alessandro Cresci A DISSERTATION Submitted to the Faculty of the University of Miami in partial fulfillment of the requirements for the degree of Doctor of Philosophy Coral Gables, Florida May 2020 ©2020 Alessandro Cresci All Rights Reserved UNIVERSITY OF MIAMI A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy MAGNETIC AND CELESTIAL ORIENTATION OF MIGRATING EUROPEAN GLASS EELS (ANGUILLA ANGUILLA) Alessandro Cresci Approved: ________________ _________________ Josefina Olascoaga, Ph.D. Joseph E. Serafy, Ph.D. Professor of Physical Oceanography Research Professor Ocean Sciences Marine Biology and Ecology ________________ _________________ William E. Johns, Ph.D. Evan K. D’Alessandro, Ph.D. Professor of Physical Oceanography Lecturer and Director, M.P.S Ocean Sciences Marine Biology and Ecology ________________ ________________ Howard I. Browman, Ph.D. Caroline M.F. Durif, Ph.D. Principal Research Scientist Principal Research Scientist Institute of Marine Research Institute of Marine Research ________________ Guillermo Prado, Ph.D. Dean of the Graduate School CRESCI, ALESSANDRO (Ph.D., Ocean Sciences) Magnetic and Celestial Orientation of Migrating (May 2020) European Glass Eels (Anguilla anguilla) Abstract of a dissertation at the University of Miami. Dissertation supervised by Professor Josefina Olascoaga. -

Mechanisms of Homing in the Fiddler Crab Uca Rapax
The Journal of Experimental Biology 206, 4425-4442 4425 © 2003 The Company of Biologists Ltd doi:10.1242/jeb.00661 Mechanisms of homing in the fiddler crab Uca rapax 2. Information sources and frame of reference for a path integration system John E. Layne*, W. Jon P. Barnes and Lindsey M. J. Duncan Division of Environmental and Evolutionary Biology, Institute of Biomedical and Life Sciences, University of Glasgow, Glasgow G12 8QQ, Scotland, UK *Author for correspondence at present address: Department of Entomology, Cornell University, Ithaca, NY 14853, USA (e-mail: [email protected]) Accepted 11 August 2003 Summary Fiddler crabs Uca rapax are central-place foragers, the digitized paths of the real crabs. The home vector making feeding excursions of up to several meters from computed by the model crab was then compared to the their burrows. This study investigates the sources of homing direction observed in the real crab. The model directional and distance information used by these crabs home vector that most closely matched that of the real when returning to their burrows. We tested the spatial crab was taken to comprise the path integration frame of reference (egocentric or exocentric), and the mechanism employed by fiddler crabs. The model that source of spatial information (idiothetic or allothetic) used best matched the real crab gained direction and distance during homing. We also tested which components of their idiothetically (from internal sources such as locomotion they integrated (only voluntary, or voluntary proprioceptors), and integrated only voluntary plus reflexive). locomotory information. Fiddler crabs in their natural mudflat habitat were Crabs were also made to run home across a patch of wet passively rotated during normal foraging behavior using acetate, on which they slipped and were thus forced to experimenter-controlled disks, before they returned home. -

Redalyc.Redescription of the Fiddler Crab Uca Spinicarpa Rathbun, 1900
Latin American Journal of Aquatic Research E-ISSN: 0718-560X [email protected] Pontificia Universidad Católica de Valparaíso Chile Arruda Bezerra, Luis; Alves Coelho, Petrônio Redescription of the fiddler crab Uca spinicarpa Rathbun, 1900 (Decapoda: Ocypodidae) Latin American Journal of Aquatic Research, vol. 38, núm. 2, julio, 2010, pp. 270-273 Pontificia Universidad Católica de Valparaíso Valparaiso, Chile Available in: http://www.redalyc.org/articulo.oa?id=175015266012 How to cite Complete issue Scientific Information System More information about this article Network of Scientific Journals from Latin America, the Caribbean, Spain and Portugal Journal's homepage in redalyc.org Non-profit academic project, developed under the open access initiative Lat. Am. J. Aquat. Res., 38(2): 270-273, 2010 Lat. Am. J. Aquat. Res. 270 DOI: 10.3856/vol38-issue2-fulltext-12 Short Communication Redescription of the fiddler crab Uca spinicarpa Rathbun, 1900 (Decapoda: Ocypodidae) Luis Arruda Bezerra1 & Petrônio Alves Coelho1 1Programa de Pós-Graduação em Oceanografia, Departamento de Oceanografia Universidade Federal de Pernambuco Avenida da Arquitetura, S/N, 50740-550, Recife, Pernambuco, Brazil ABSTRACT. The fiddler crab Uca spinicarpa was presented by M.J. Rathbun; however, no original description or figures were provived. The species was presented in a key and the registration number of the type material mentioned. Thus, a redescription and figures of this species based on a specimen from the type locality are provided herein. Additional morphological characters based on specimens deposited in the National Museum of Natural History (Smithsonian Institution), Washington, DC, and in the American Museum of Natural History, New York City, as well as remarks regarding its geographic distribution are also provided. -

Uca Rapax (Mudflat Fiddler Crab)
UWI The Online Guide to the Animals of Trinidad and Tobago Ecology Uca rapax (Mudflat Fiddler Crab) Order: Decapoda (Crabs, Lobsters and Shrimps) Class: Malacostraca (Crustaceans: Crabs, Sand-hoppers and Woodlice) Phylum: Arthropoda (Arthropods) Fig. 1. Mudflat fiddler crab, Uca rapax. [http://ocean.si.edu/mangroves, downloaded 10 March 2016] TRAITS. The mudflat fiddler crab Uca rapax is considered dimorphic since the males have a large claw on one side of the body (Fig. 1) and the females have two small claws. Males are also larger in body size: in Brazil, the carapace width at maturity was 13-15mm in males and 11- 12mm in females (Castiglioni and Negreiros-Fransozo, 2004). Both females and males are generally greyish-white in colour, but green to blue can be seen in the large claw and the eyestalks. Colour is dependent upon environmental factors, and hints of orange and yellow are also found in the claws. Fiddler crabs are darker during the day time and light during the night (Tpwd.Texas.Gov., 2016). DISTRIBUTION. Uca rapax is found along tropical coasts of the USA (southern Florida, Texas), West Indies and the Caribbean, and Brazil (Fig. 2). HABITAT AND ACTIVITY. As the name suggests (mud fiddler crab), they reside in intertidal zones of muddy areas of the salt marsh and mangroves (Figueiredo et al., 2008) (Fig. 3). The soft mud is not only home to these creatures but also their feeding ground and protection. Uca rapax are diurnal, skilled at burrowing into the mud, creating holes that provide a nest for their young, privacy for mating, for sleeping and in the colder regions “hibernation” during the winter UWI The Online Guide to the Animals of Trinidad and Tobago Ecology (Gcrl.Usm.Edu., 2016). -

Formatting Your Paper for Submission in the Moorea
RECOVERY OF THE TERRESTRIAL CRAB CARDISOMA CARNIFEX AFTER BURROW DISTURBANCE JACQUELINE M. HURLEY Integrative Biology, University of California, Berkeley, California 94720 USA Abstract. The importance of disturbance ecology grows as pristine habitat becomes increasingly encroached upon by land use change. This study focuses on the behavior of the burrowing terrestrial crab Cardisoma carnifex (Herbst 1794) on the island of Moorea after its semi‐permanent burrow was disrupted. In the first manipulation, a set of four disturbance treatments was applied to burrows in sand and dirt substrate to examine recovery time. The second manipulation increased the intensity of the disturbance to see if the crabs’ strategies change. The results showed a significant increase in recovery time with the intensity of disturbance in dirt substrates, but not in sand. There was also a significant combined effect of treatment and substrate type on recovery. The second set of data showed the same set of recovery strategies even as the disturbances were more intense. This shows that these crabs can restore their burrows in relatively lows level of disturbance, but it remains to be seen how they and other species cope with larger scale influences such as urbanization. Key words: disturbance ecology; Cardisoma carnifex; crustacean; recovery; burrowing behavior; Society Islands; French Polynesia INTRODUCTION subject to disturbances of both natural and anthropogenic causes. Due to its proximity to As the world becomes more influenced by picturesque ocean views, crab habitat is often development, organisms are faced with the paved over or landscaped for developmental constant requirement to adapt their behavior purposes. The soils are compacted for roads, to their changing surroundings, i.e. -
Collective Behavior As a Driver of Critical Transitions in Migratory Populations Andrew Berdahl1,2*†, Anieke Van Leeuwen2†, Simon A
Berdahl et al. Movement Ecology (2016) 4:18 DOI 10.1186/s40462-016-0083-8 RESEARCH Open Access Collective behavior as a driver of critical transitions in migratory populations Andrew Berdahl1,2*†, Anieke van Leeuwen2†, Simon A. Levin2 and Colin J. Torney2,3 Abstract Background: Mass migrations are among the most striking examples of animal movement in the natural world. Such migrations are major drivers of ecosystem processes and strongly influence the survival and fecundity of individuals. For migratory animals, a formidable challenge is to find their way over long distances and through complex, dynamic environments. However, recent theoretical and empirical work suggests that by traveling in groups, individuals are able to overcome these challenges and increase their ability to navigate. Here we use models to explore the implications of collective navigation on migratory, and population, dynamics, for both breeding migrations (to-and-fro migrations between distinct, fixed, end-points) and feeding migrations (loop migrations that track favorable conditions). Results: We show that while collective navigation does improve a population’s ability to migrate accurately, it can lead to Allee effects, causing the sudden collapse of populations if numbers fall below a critical threshold. In some scenarios, hysteresis prevents the migration from recovering even after the cause of the collapse has been removed. In collectively navigating populations that are locally adapted to specific breeding sites, a slight increase in mortality can cause a collapse of genetic population structure, rather than population size, making it more difficult to detect and prevent. Conclusions: Despite the large interest in collective behavior and its ubiquity in many migratory species, there is a notable lack of studies considering the implications of social navigation on the ecological dynamics of migratory species.