Rapportmall För Examensarbete
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Bit Y Aparte | N.º 1
SELLO ARSGAMES | Nº 1 | Enero 2014 Revista interdisciplinar de estudios videolúdicos EDITORIAL ARTE En el bit de Bit y aparte Hibridaciones contempo- / pág. 7 ráneas: el nuevo ambiente estético / pág. 8 María Luján Oulton / Eurídice Cabañes Martínez #ÍNDICE COMITÉ CIENTÍFICO ARTE EDUCACIÓN GÉNERO Implicaciones de aprender a God of War: consecuencias de Género y sexualidad más allá FLAVIO ESCRIBANO (España). Doctor por la Universidad Complu- crear videojuegos / pág. 22 la violencia a través de héroe de lo humano / pág. 50 tense de Madrid con la tesis doctoral “El videojuego como he- griego/ pág. 36 rramienta para la pedagogía artística. Innovación y creatividad”. Jacinto Quesnel Alvarez Juan Francisco Belmonte Ávila Begoña Cadiñanos Martínez / GRACIELA ESNAOLA (Argentina). Docente del Programa de Doc- Ruth García Martín torado “Formación del Profesorado en Entornos Virtuales”. Uni- versidad de Valencia. BIT Y APARTE GONZALO FRASCA (Uruguay). Catedrático de Videojuegos de la Facultad de Comunicación y Diseño de la Universidad ORT. Revista interdisciplinar de estudios videolúdicos ÓCAR GARCÍA PANELLA (España). Director del Grado en Vi- deojuegos de ENTIUB, del Máster en Gamificación ENTIUB y del Edita: Asociación ARSGAMES Máster en Gamifiación Online y Transmedia Storytelling de IEBS. Ilustración de la portada: PATRICIA GOUVEIA (Portugal). Profesora en el master de Arte digi- Juan Díaz-Faes GAME STUDIES GAME STUDIES INNOVACIÓN tal en la Faculdade de Ciências Sociais e Humanas. Universidade Evolución histórica de los CRPG Aprendizaje en MMOG Videojuegos, machinima y cine Diseño de portada, ilustración y Nova de Lisboa. (Computer Role-Playing Games) / pág. 84 clásico / pág. 94 producción gráfica: / pág. 64 MAR MARCOS MOLANO (España). Profesora Titular en la Facultad de SELLO ARSGAMES Ruth S. -

Video Games and the Mobilization of Anxiety and Desire
PLAYING THE CRISIS: VIDEO GAMES AND THE MOBILIZATION OF ANXIETY AND DESIRE BY ROBERT MEJIA DISSERTATION Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Communications in the Graduate College of the University of Illinois at Urbana-Champaign, 2012 Urbana, Illinois Doctoral Committee: Professor Kent A. Ono, Chair Professor John Nerone Professor Clifford Christians Professor Robert A. Brookey, Northern Illinois University ABSTRACT This is a critical cultural and political economic analysis of the video game as an engine of global anxiety and desire. Attempting to move beyond conventional studies of the video game as a thing-in-itself, relatively self-contained as a textual, ludic, or even technological (in the narrow sense of the word) phenomenon, I propose that gaming has come to operate as an epistemological imperative that extends beyond the site of gaming in itself. Play and pleasure have come to affect sites of culture and the structural formation of various populations beyond those conceived of as belonging to conventional gaming populations: the workplace, consumer experiences, education, warfare, and even the practice of politics itself, amongst other domains. Indeed, the central claim of this dissertation is that the video game operates with the same political and cultural gravity as that ascribed to the prison by Michel Foucault. That is, just as the prison operated as the discursive site wherein the disciplinary imaginary was honed, so too does digital play operate as that discursive site wherein the ludic imperative has emerged. To make this claim, I have had to move beyond the conventional theoretical frameworks utilized in the analysis of video games. -

Disruptive Innovation and Internationalization Strategies: the Case of the Videogame Industry Par Shoma Patnaik
HEC MONTRÉAL Disruptive Innovation and Internationalization Strategies: The Case of the Videogame Industry par Shoma Patnaik Sciences de la gestion (Option International Business) Mémoire présenté en vue de l’obtention du grade de maîtrise ès sciences en gestion (M. Sc.) Décembre 2017 © Shoma Patnaik, 2017 Résumé Ce mémoire a pour objectif une analyse des deux tendances très pertinentes dans le milieu du commerce d'aujourd'hui – l'innovation de rupture et l'internationalisation. L'innovation de rupture (en anglais, « disruptive innovation ») est particulièrement devenue un mot à la mode. Cependant, cela n'est pas assez étudié dans la recherche académique, surtout dans le contexte des affaires internationales. De plus, la théorie de l'innovation de rupture est fréquemment incomprise et mal-appliquée. Ce mémoire vise donc à combler ces lacunes, non seulement en examinant en détail la théorie de l'innovation de rupture, ses antécédents théoriques et ses liens avec l'internationalisation, mais en outre, en situant l'étude dans l'industrie des jeux vidéo, il découvre de nouvelles tendances industrielles et pratiques en examinant le mouvement ascendant des jeux mobiles et jeux en lignes. Le mémoire commence par un dessein des liens entre l'innovation de rupture et l'internationalisation, sur le fondement que la recherche de nouveaux débouchés est un élément critique dans la théorie de l'innovation de rupture. En formulant des propositions tirées de la littérature académique, je postule que les entreprises « disruptives » auront une vitesse d'internationalisation plus élevée que celle des entreprises traditionnelles. De plus, elles auront plus de facilité à franchir l'obstacle de la distance entre des marchés et pénétreront dans des domaines inconnus et inexploités. -

Thesis Front Matter
UNIVERSITY OF CALGARY THE INVENTION OF GOOD GAMES: UNDERSTANDING LEARNING DESIGN IN COMMERCIAL VIDEO GAMES by KATRIN BECKER A THESIS SUBMITTED TO THE FACULTY OF GRADUATE STUDIES IN PARTIAL FULFILMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY GRADUATE DIVISION OF EDUCATIONAL RESEARCH CALGARY, ALBERTA JANUARY 2008 © KATRIN BECKER 2008 ii Abstract This work sought to help inform the design of educational digital games by the studying the design of successful commercial videogames. The main thesis question was: How does a commercially and critically successful modern video game support the learning that players must accomplish in order to succeed in the game (i.e. get to the end or win)? This work takes a two-pronged approach to supporting the main argument, which is that the reason we can learn about designing educational games by studying commercial games is that people already learn from games and the best ones are already quite effective at teaching players what they need to learn in order to succeed in the game. The first part of the research establishes a foundation for the argument, namely that accepted pedagogy can be found in existing commercial games. The second part of the work proposes new methods for analysing games that can uncover mechanisms used to support learning in games which can be emplyed even if those games were not originally designed as educational objects. In order to support the claim that ‘good’ commercial videogames already embody elements of sound pedagogy an explicit connection is made between game design and formally accepted theory and models in teaching and learning. -
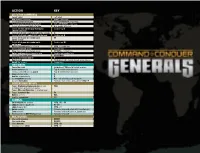
Command & Conquer: Generals Windows Manual 2
SECURITY COUNCIL SUB-COMMITTEE (RESOLUTION 1379) ON GLOBAL LIBERATION ARMY TABLE OF CONTENTS Report to Security Council: Situational Report (SIT REP) on GLA Activities SETTING UP THE GAME ....................................................2 Distribution: CLASSIFIED MAIN MENU............................................ 2 Hotan, China OPTIONS.............................................. 2 For several months, observers have expressed concern over the activities of the Global Liberation Army (GLA). A loose SOLO PLAY ................................................................................3 federation of freedom fighters and terrorists, the GLA has SOLO PLAY MAIN MENU................................. 4 established several strongholds in the republics of Central Asia. By distributing forces and leadership across the borders C&C GENERALS BASICS ................................ 4 of these developing nations, the GLA has thwarted efforts to SKIRMISHES .......................................... 7 engage in meaningful dialogue. Last year, this group without borders crossed into Western China and began building popular GAME SCREEN ......................................... 7 support for an independent state in this remote region. GLA GENERALS WINDOW .................................... 9 funding continues to grow from unknown sources, and its leadership remains a mystery. LOAD/SAVE ................................................................................12 For the Beijing government, this incursion along its western UNITS, STRUCTURES, -

Games and Learning Styles
University of Calgary PRISM: University of Calgary's Digital Repository Science Science Research & Publications 2005 Games and Learning Styles Becker, Katrin Katrin Becker, Games and Learning Styles Presented at the Special Session on Computer Games for Learning and Teaching, at The IASTED International Conference on Education and Technology ~ICET 2005~ July 4-6, 2005 Calgary, Alberta, Canada. http://hdl.handle.net/1880/46706 Presentation Downloaded from PRISM: https://prism.ucalgary.ca Games and Learning Styles Katrin Becker Graduate Division of Educational Research University of Calgary 2400 University Drive NW Calgary, Alberta Canada T2N 1N4 (403)220-5769 email: [email protected] individual’s strengths by presenting everything in their Abstract favorite style then we are doing them a disservice by not encouraging them to develop their other skills. Finally, Several ways to address learning are: 1) through while most teachers have definite preferences for teaching learning theories, 2) through learning styles (treated as styles, most can also learn to adopt others, given adequate distinct from learning theories here), and 3) through support. instructional design theories and models. This paper looks at the second approach to examine how modern games Digital games are beginning to rival movies and support various learning styles in their design and television as an entertainment pass time. Many now feel gameplay. Four well-known learning style models are that games constitute an important learning technology examined in the context of computer game design. These [2-4]. Modern games tend to be very complex, often are: the Keirsey Temperament Sorter, the Gregory Style requiring many hours to learn to play, and successful Delineator, Felder’s Index of Learning Styles, and Kolb’s games support players very effectively during this Learning Style Inventory. -

Onderzoek V3.Pdf
Onderzoek Christophe Deloo, Roy Straver & Machiel Visser Versie 3 (26-06-2010) Inhoudsopgave Voorwoord ................................................................................................................................. 2 1 Inleiding .................................................................................................................................. 3 2 Onderzoeksmethode ................................................................................................................ 4 3 Analyse .................................................................................................................................... 6 3.1 FACSIM Editor ................................................................................................................ 6 3.2 DFBHDMED (Delta Force Black Hawk Down) ............................................................. 9 3.3 N.I.L.E. (Joint Operations Typhoon Rising) .................................................................. 11 3.4 Operation Flashpoint Mission Editor ............................................................................. 14 3.5 Battlefield 2 Editor ......................................................................................................... 17 3.6 Sandbox (Far Cry) .......................................................................................................... 20 3.7 World Builder (Command & Conquer Generals) .......................................................... 23 3.7 The Elder Scrolls Construction Set (Morrowind) -
Command & Conquer
CCG pc Man (E) 15/1/03 3:47 pm Page 2 SECURITY COUNCIL SUB-COMMITTEE (RESOLUTION 1379) ON GLOBAL LIBERATION ARMY Report to Security Council: Situational Report (SIT REP) on GLA Activities Distribution: Classified Hotan, China For several months, observers have expressed concern over the activities of the Global Liberation Army (GLA). A loose federation of freedom fighters and terrorists, the GLA has established several strongholds in the republics of Central Asia. By distributing forces and leadership across the borders of these developing nations, the GLA has thwarted efforts to engage in meaningful dialogue. Last year, this group without borders crossed into Western China and began building popular support for an independent state in this remote region. GLA funding continues to grow from unknown sources and its leadership remains a mystery. For the Beijing government, this incursion along its western border could not have come at a worse time. The reforms in China’s “Modern Way” program have produced new civil liberties and excellent growth in Chinese exports, particularly in light manufacturing and agricultural products. Beijing has repeatedly stated that these changes are here to stay, a position that does not sit well with the GLA. Last week, the GLA struck a military depot at Yecheng, stole thousands of rounds of munitions and destroyed a nuclear power plant. Dangerous levels of radiation have been detected over 100 kilometres downwind. The Chinese government is furious and has refused to allow observers to mediate discussions with the GLA. Several divisions of the Red Army have established positions in the province along major roadways and rivers. -

Space and Place As Expressive Categories in Videogames
Space and place as expressive categories in videogames A thesis submitted for the degree of Doctor of Philosophy by Paul Martin School of Arts Brunel University August 2011 1 Abstract This thesis sets out to explore some of the ways in which videogames use space as a means of expression. This expression takes place in two registers: representation and embodiment. Representation is understood as a form of expression in which messages and ideas are communicated. Embodiment is understood as a form of expression in which the player is encouraged to take up a particular position in relation to the game. This distinction between representation and embodiment is useful analytically but the thesis attempts to synthesise these modes in order to account for the experience of playing videogames, where representation and embodiment are constantly happening and constantly influencing and shaping each other. Several methods are developed to analyse games in a way that brings these two modes to the fore. The thesis attempts to arrive at a number of spatial aesthetics of videogames by adapting methods from game studies, literary criticism, phenomenology, onomastics (the study of names), cartographic theory, choreography and architectural and urban formation analysis. 2 Table of Contents Abstract............................................................................................................................. 2 Table of Figures ................................................................................................................ 4 -
Table of Contents
Table of Contents 01 Let's Talk Games! - Introduction to the Special Issue on Religion in Digital Games Simone Heidbrink and Tobias Knoll 05 Theorizing Religion in Digital Games - Perspectives and Approaches Simone Heidbrink, Tobias Knoll and Jan Wysocki 51 Studying Religion in Digital Gaming - A Critical Review of an Emerging Field Gregory Price Grieve and Heidi A. Campbell 68 Developing a Framework for Understanding the Relationship Between Religion and Videogames Richard E. Ferdig 86 Locating the Locus of Study on "Religion" in Video Games J.D.F. Tuckett and David G. Robertson 108 Game Cultures as Sub-Creations - Case Studies on Religion & Digital Plays Elke Hemminger 134 Maker's Breath - Religion, Magic, and the 'godless' World of BioWare's Dragon Age II (2011) Kristin M.S. Bezio 162 'The Lamb of Comstock' - Dystopia and Religion in Video Games Frank G. Bosman 183 Religion as Resource in Digital Games Ryan Clark Thames 197 'When people pray, a god is born... This god is you!' - An Introduction to Religion and God in Digital Games Markus Wiemker and Jan Wysocki Online – Heidelberg Journal for Religions on the Internet Volume 5 (2014) Religion in Digital Games http://online.uni-hd.de 224 The Lord is My Shepard - Confronting Religion in the Mass Effect Trilogy Joshua A. Irizarry and Ita T. Irizarry 249 Religion(s) in Videogames - Historical and Anthropological Observations Alessandro Testa 279 Socialization of Teenagers Playing The Sims - The Paradoxical Use of Video Games to Re- enchant Life Pascaline Lorentz 301 Fátima Postmortem Luis -
Break Into the Game Industry. How to Get a Job Making Video Games
Color profile: Generic CMYK printer profile Composite Default screen Blow the Lid Off! / Break into the Game Industry / Adams / 222660-9 / Blind Folio i Ernest Adams McGraw-Hill/Osborne New York Chicago San Francisco Lisbon London Madrid Mexico City Milan New Delhi San Juan Seoul Singapore Sydney Toronto P:\010Comp\BlowLid\660-9\fm.vp Monday, May 05, 2003 1:06:39 PM Color profile: Generic CMYK printer profile Composite Default screen Blow the Lid Off! / Break into the Game Industry / Adams / 222660-9 / Blind Folio ii McGraw-Hill/Osborne Brandon A. Nordin 2100 Powell Street, 10th Floor Emeryville, California 94608 U.S.A. Scott Rogers To arrange bulk purchase discounts for sales promotions, premiums, or fund-raisers, please contact McGraw-Hill/Osborne Gareth Hancock at the above address. For information on translations or book distributors outside the U.S.A., please see the International Contact Jennifer Malnick Information page immediately following the index of this book. Break into the Game Industry: How to Get A Job Making Video Jessica Wilson Games Copyright © 2003 by The McGraw-Hill Companies. All rights Ellen Beeman reserved. Printed in the United States of America. Except as permitted under the Copyright Act of 1976, no part of this publication may be reproduced or distributed in any form or by Mike McGee any means, or stored in a database or retrieval system, without the prior written permission of publisher, with the exception that the program listings may be entered, stored, and executed in a Claire Splan computer system, but they may not be reproduced for publication. -

June/July 2005
>> THE FIRST ANNUAL BUSINESS ISSUE JUNE/JULY 2005 THE LEADING GAME INDUSTRY MAGAZINE >>STUDIO STANCE >>LICENSE TO PLAY? >>E3 HIGHLIGHTS DEVELOPMENT STUDIOS, DEAD PRESIDENTS, INSIDE THE FILTH POST-ACQUISITION GAME ADAPTATIONS AND THE FURY STUDIO POSTMORTEM: A COLLECTIVE BACKBONE $5.95US $6.95CAN 07 0 71486 02133 9 DISPLAY UNTIL AUGUST 16, 2005 []CONTENTS JUNE/JULY 2005 VOLUME 12, NUMBER 6 FEATURES 10 THE STUDIO STANCE When a publisher acquires a development studio or studios, it must decide how the acquisition will play out in terms of practical considerations. Will the studio remain fairly autonomous and in its home city, or will the publisher assemble the employees into a more centralized office? Other approaches—such as streamlining only meta- processes, like payroll, benefits, and tech support—are also available. What does a studio’s stance mean for you? By Paul Hyman 17 PLAYING SMART WITH IP 10 The quandary of whether to create original intellectual property or use licensed characters or settings for a game is, at this point, fairly well- discussed. But how closely have the potential pitfalls of licensing, which is generally considered to be a 'safer bet', been examined, or the greater effort required to popularize original IP? With specific input from both licensors and publishers, we look at the state of licensing as the next 24 hardware generation rapidly approaches. By Dan Lee Rogers STUDIO POSTMORTEM 24 A COLLECTIVE BACKBONE: FOUNDATION 9’S DEVELOPMENT DREAM 17 When Backbone Entertainment and The Collective joined forces, they created the largest independent developer in North America, Foundation 9, with about 400 employees under its care.