Lecture Notes on Stability Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Order Types and Structure of Orders
ORDER TYPES AND STRUCTURE OF ORDERS BY ANDRE GLEYZALp) 1. Introduction. This paper is concerned with operations on order types or order properties a and the construction of order types related to a. The reference throughout is to simply or linearly ordered sets, and we shall speak of a as either property or type. Let a and ß be any two order types. An order A will be said to be of type aß if it is the sum of /3-orders (orders of type ß) over an a-order; i.e., if A permits of decomposition into nonoverlapping seg- ments each of order type ß, the segments themselves forming an order of type a. We have thus associated with every pair of order types a and ß the product order type aß. The definition of product for order types automatically associates with every order type a the order types aa = a2, aa2 = a3, ■ ■ ■ . We may further- more define, for all ordinals X, a Xth power of a, a\ and finally a limit order type a1. This order type has certain interesting properties. It has closure with respect to the product operation, for the sum of ar-orders over an a7-order is an a'-order, i.e., a'al = aI. For this reason we call a1 iterative. In general, we term an order type ß having the property that ßß = ß iterative, a1 has the following postulational identification: 1. a7 is a supertype of a; that is to say, all a-orders are a7-orders. 2. a1 is iterative. -

Solution Bounds, Stability and Attractors' Estimates of Some Nonlinear Time-Varying Systems
1 Solution Bounds, Stability and Attractors’ Estimates of Some Nonlinear Time-Varying Systems Mark A. Pinsky and Steve Koblik Abstract. Estimation of solution norms and stability for time-dependent nonlinear systems is ubiquitous in numerous applied and control problems. Yet, practically valuable results are rare in this area. This paper develops a novel approach, which bounds the solution norms, derives the corresponding stability criteria, and estimates the trapping/stability regions for a broad class of the corresponding systems. Our inferences rest on deriving a scalar differential inequality for the norms of solutions to the initial systems. Utility of the Lipschitz inequality linearizes the associated auxiliary differential equation and yields both the upper bounds for the norms of solutions and the relevant stability criteria. To refine these inferences, we introduce a nonlinear extension of the Lipschitz inequality, which improves the developed bounds and estimates the stability basins and trapping regions for the corresponding systems. Finally, we conform the theoretical results in representative simulations. Key Words. Comparison principle, Lipschitz condition, stability criteria, trapping/stability regions, solution bounds AMS subject classification. 34A34, 34C11, 34C29, 34C41, 34D08, 34D10, 34D20, 34D45 1. INTRODUCTION. We are going to study a system defined by the equation n (1) xAtxftxFttt , , [0 , ), x , ft ,0 0 where matrix A nn and functions ft:[ , ) nn and F : n are continuous and bounded, and At is also continuously differentiable. It is assumed that the solution, x t, x0 , to the initial value problem, x t0, x 0 x 0 , is uniquely defined for tt0 . Note that the pertained conditions can be found, e.g., in [1] and [2]. -

Strange Attractors and Classical Stability Theory
Nonlinear Dynamics and Systems Theory, 8 (1) (2008) 49–96 Strange Attractors and Classical Stability Theory G. Leonov ∗ St. Petersburg State University Universitetskaya av., 28, Petrodvorets, 198504 St.Petersburg, Russia Received: November 16, 2006; Revised: December 15, 2007 Abstract: Definitions of global attractor, B-attractor and weak attractor are introduced. Relationships between Lyapunov stability, Poincare stability and Zhukovsky stability are considered. Perron effects are discussed. Stability and instability criteria by the first approximation are obtained. Lyapunov direct method in dimension theory is introduced. For the Lorenz system necessary and sufficient conditions of existence of homoclinic trajectories are obtained. Keywords: Attractor, instability, Lyapunov exponent, stability, Poincar´esection, Hausdorff dimension, Lorenz system, homoclinic bifurcation. Mathematics Subject Classification (2000): 34C28, 34D45, 34D20. 1 Introduction In almost any solid survey or book on chaotic dynamics, one encounters notions from classical stability theory such as Lyapunov exponent and characteristic exponent. But the effect of sign inversion in the characteristic exponent during linearization is seldom mentioned. This effect was discovered by Oscar Perron [1], an outstanding German math- ematician. The present survey sets forth Perron’s results and their further development, see [2]–[4]. It is shown that Perron effects may occur on the boundaries of a flow of solutions that is stable by the first approximation. Inside the flow, stability is completely determined by the negativeness of the characteristic exponents of linearized systems. It is often said that the defining property of strange attractors is the sensitivity of their trajectories with respect to the initial data. But how is this property connected with the classical notions of instability? For continuous systems, it was necessary to remember the almost forgotten notion of Zhukovsky instability. -

Chapter 8 Stability Theory
Chapter 8 Stability theory We discuss properties of solutions of a first order two dimensional system, and stability theory for a special class of linear systems. We denote the independent variable by ‘t’ in place of ‘x’, and x,y denote dependent variables. Let I ⊆ R be an interval, and Ω ⊆ R2 be a domain. Let us consider the system dx = F (t, x, y), dt (8.1) dy = G(t, x, y), dt where the functions are defined on I × Ω, and are locally Lipschitz w.r.t. variable (x, y) ∈ Ω. Definition 8.1 (Autonomous system) A system of ODE having the form (8.1) is called an autonomous system if the functions F (t, x, y) and G(t, x, y) are constant w.r.t. variable t. That is, dx = F (x, y), dt (8.2) dy = G(x, y), dt Definition 8.2 A point (x0, y0) ∈ Ω is said to be a critical point of the autonomous system (8.2) if F (x0, y0) = G(x0, y0) = 0. (8.3) A critical point is also called an equilibrium point, a rest point. Definition 8.3 Let (x(t), y(t)) be a solution of a two-dimensional (planar) autonomous system (8.2). The trace of (x(t), y(t)) as t varies is a curve in the plane. This curve is called trajectory. Remark 8.4 (On solutions of autonomous systems) (i) Two different solutions may represent the same trajectory. For, (1) If (x1(t), y1(t)) defined on an interval J is a solution of the autonomous system (8.2), then the pair of functions (x2(t), y2(t)) defined by (x2(t), y2(t)) := (x1(t − s), y1(t − s)), for t ∈ s + J (8.4) is a solution on interval s + J, for every arbitrary but fixed s ∈ R. -
Stability Theory
Department of Mathematics Master's thesis Stability Theory Author: Supervisor: Sven Bosman Dr. Jaap van Oosten Second reader: Prof. Dr. Gunther Cornelissen May 15, 2018 Acknowledgements First and foremost, I would like to thank my supervisor, Dr. Jaap van Oosten, for guiding me. He gave me a chance to pursue my own interests for this project, rather then picking a topic which would have been much easier to supervise. He has shown great patience when we were trying to determine how to get a grip on this material, and has made many helpful suggestions and remarks during the process. I would like to thank Prof. Dr. Gunther Cornelissen for being the second reader of this thesis. I would like to thank Dr. Alex Kruckman for his excellent answer to my question on math.stackexchange.com. He helped me with a problem I had been stuck with for quite some time. I have really enjoyed the master's thesis logic seminar the past year, and would like to thank the participants Tom, Menno, Jetze, Mark, Tim, Bart, Feike, Anton and Mireia for listening to my talks, no matter how boring they might have been at times. Special thanks go to Jetze Zoethout for reading my entire thesis and providing me with an extraordinary number of helpful tips, comments, suggestions, corrections and improvements. Most of my thesis was written in the beautiful library of the Utrecht University math- ematics department, which has been my home away from home for the last three years. I would like to thank all my friends there for the many enjoyable lunchbreaks, the interesting political discussions, and the many, many jokes. -
![Arxiv:1801.06566V1 [Math.LO] 19 Jan 2018](https://docslib.b-cdn.net/cover/6906/arxiv-1801-06566v1-math-lo-19-jan-2018-526906.webp)
Arxiv:1801.06566V1 [Math.LO] 19 Jan 2018
MODEL THEORY AND MACHINE LEARNING HUNTER CHASE AND JAMES FREITAG ABSTRACT. About 25 years ago, it came to light that a single combinatorial property deter- mines both an important dividing line in model theory (NIP) and machine learning (PAC- learnability). The following years saw a fruitful exchange of ideas between PAC learning and the model theory of NIP structures. In this article, we point out a new and similar connection between model theory and machine learning, this time developing a correspon- dence between stability and learnability in various settings of online learning. In particular, this gives many new examples of mathematically interesting classes which are learnable in the online setting. 1. INTRODUCTION The purpose of this note is to describe the connections between several notions of com- putational learning theory and model theory. The connection between probably approxi- mately correct (PAC) learning and the non-independence property (NIP) is well-known and was originally noticed by Laskowski [8]. In the ensuing years, there have been numerous interactions between the combinatorics associated with PAC learning and model theory in the NIP setting. Below, we provide a quick introduction to the PAC-learning setting as well as learning in general. Our main purpose, however, is to explain a new connection between the model theory and machine learning. Roughly speaking, our manuscript is similar to [8], but develops the connection between stability and online learning. That the combinatorial quantity of VC-dimension plays an essential role in isolating the main dividing line in both PAC-learning and perhaps the second most prominent dividing line in model-theoretic classification theory (NIP/IP) is a remarkable fact. -
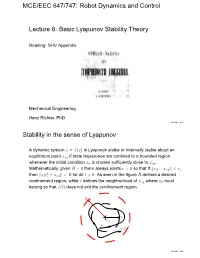
Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory
MCE/EEC 647/747: Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory Reading: SHV Appendix Mechanical Engineering Hanz Richter, PhD MCE503 – p.1/17 Stability in the sense of Lyapunov A dynamic system x˙ = f(x) is Lyapunov stable or internally stable about an equilibrium point xeq if state trajectories are confined to a bounded region whenever the initial condition x0 is chosen sufficiently close to xeq. Mathematically, given R> 0 there always exists r > 0 so that if ||x0 − xeq|| <r, then ||x(t) − xeq|| <R for all t> 0. As seen in the figure R defines a desired confinement region, while r defines the neighborhood of xeq where x0 must belong so that x(t) does not exit the confinement region. R r xeq x0 x(t) MCE503 – p.2/17 Stability in the sense of Lyapunov... Note: Lyapunov stability does not require ||x(t)|| to converge to ||xeq||. The stronger definition of asymptotic stability requires that ||x(t)|| → ||xeq|| as t →∞. Input-Output stability (BIBO) does not imply Lyapunov stability. The system can be BIBO stable but have unbounded states that do not cause the output to be unbounded (for example take x1(t) →∞, with y = Cx = [01]x). The definition is difficult to use to test the stability of a given system. Instead, we use Lyapunov’s stability theorem, also called Lyapunov’s direct method. This theorem is only a sufficient condition, however. When the test fails, the results are inconclusive. It’s still the best tool available to evaluate and ensure the stability of nonlinear systems. -
![Arxiv:1609.03252V6 [Math.LO] 21 May 2018 M 00Sbetcasfiain Rmr 34.Secondary: 03C48](https://docslib.b-cdn.net/cover/6647/arxiv-1609-03252v6-math-lo-21-may-2018-m-00sbetcas-ain-rmr-34-secondary-03c48-816647.webp)
Arxiv:1609.03252V6 [Math.LO] 21 May 2018 M 00Sbetcasfiain Rmr 34.Secondary: 03C48
TOWARD A STABILITY THEORY OF TAME ABSTRACT ELEMENTARY CLASSES SEBASTIEN VASEY Abstract. We initiate a systematic investigation of the abstract elementary classes that have amalgamation, satisfy tameness (a locality property for or- bital types), and are stable (in terms of the number of orbital types) in some cardinal. Assuming the singular cardinal hypothesis (SCH), we prove a full characterization of the (high-enough) stability cardinals, and connect the sta- bility spectrum with the behavior of saturated models. We deduce (in ZFC) that if a class is stable on a tail of cardinals, then it has no long splitting chains (the converse is known). This indicates that there is a clear notion of superstability in this framework. We also present an application to homogeneous model theory: for D a homogeneous diagram in a first-order theory T , if D is both stable in |T | and categorical in |T | then D is stable in all λ ≥|T |. Contents 1. Introduction 2 2. Preliminaries 4 3. Continuity of forking 8 4. ThestabilityspectrumoftameAECs 10 5. The saturation spectrum 15 6. Characterizations of stability 18 7. Indiscernibles and bounded equivalence relations 20 arXiv:1609.03252v6 [math.LO] 21 May 2018 8. Strong splitting 22 9. Dividing 23 10. Strong splitting in stable tame AECs 25 11. Stability theory assuming continuity of splitting 27 12. Applications to existence and homogeneous model theory 31 References 32 Date: September 7, 2018 AMS 2010 Subject Classification: Primary 03C48. Secondary: 03C45, 03C52, 03C55, 03C75, 03E55. Key words and phrases. Abstract elementary classes; Tameness; Stability spectrum; Saturation spectrum; Limit models. 1 2 SEBASTIEN VASEY 1. -

Measures in Model Theory
Measures in model theory Anand Pillay University of Leeds Logic and Set Theory, Chennai, August 2010 IntroductionI I I will discuss the growing use and role of measures in \pure" model theory, with an emphasis on extensions of stability theory outside the realm of stable theories. I The talk is related to current work with Ehud Hrushovski and Pierre Simon (building on earlier work with Hrushovski and Peterzil). I I will be concerned mainly, but not exclusively, with \tame" rather than \foundational" first order theories. I T will denote a complete first order theory, 1-sorted for convenience, in language L. I There are canonical objects attached to T such as Bn(T ), the Boolean algebra of formulas in free variables x1; ::; xn up to equivalence modulo T , and the type spaces Sn(T ) of complete n-types (ultrafilters on Bn(T )). IntroductionII I Everything I say could be expressed in terms of the category of type spaces (including SI (T ) for I an infinite index set). I However it has become standard to work in a fixed saturated model M¯ of T , and to study the category Def(M¯ ) of sets X ⊆ M¯ n definable, possibly with parameters, in M¯ , as well as solution sets X of types p 2 Sn(A) over small sets A of parameters. I Let us remark that the structure (C; +; ·) is a saturated model of ACF0, but (R; +; ·) is not a saturated model of RCF . I The subtext is the attempt to find a meaningful classification of first order theories. Stable theoriesI I The stable theories are the \logically perfect" theories (to coin a phrase of Zilber). -

Multiplication in Vector Lattices
MULTIPLICATION IN VECTOR LATTICES NORMAN M. RICE 1. Introduction. B. Z. Vulih has shown (13) how an essentially unique intrinsic multiplication can be defined in a Dedekind complete vector lattice L having a weak order unit. Since this work is available only in Russian, a brief outline is given in § 2 (cf. also the review by E. Hewitt (4), and for details, consult (13) or (11)). In general, not every pair of elements in L will have a product in L. In § 3 we discuss certain properties which ensure that, in fact, the multiplication will be universally defined, and it turns out that L can always be embedded as an order-dense order ideal in a larger space L# which has these properties. It is then possible to define multiplication in spaces without a unit. In § 4 we show that if L has a normal integral 0, then 4> can be extended to a normal integral on a larger space Li(<t>) in L#, and £i(0) may be regarded as an abstract integral space. In § 5 a very general form of the Radon-Niko- dym theorem is proved, and in § 6 this is used to give a relatively simple proof of a theorem of Segal giving a necessary and sufficient condition for the Radon-Nikodym theorem to hold in a measure space. 2. Multiplication in spaces with a unit. Let L be a vector lattice which is Dedekind complete (i.e., every set which is bounded above has a least upper bound) and has a weak order unit 1 (i.e., inf (1, x) > 0, whenever x > 0). -

Analysis of ODE Models
Analysis of ODE Models P. Howard Fall 2009 Contents 1 Overview 1 2 Stability 2 2.1 ThePhasePlane ................................. 5 2.2 Linearization ................................... 10 2.3 LinearizationandtheJacobianMatrix . ...... 15 2.4 BriefReviewofLinearAlgebra . ... 20 2.5 Solving Linear First-Order Systems . ...... 23 2.6 StabilityandEigenvalues . ... 28 2.7 LinearStabilitywithMATLAB . .. 35 2.8 Application to Maximum Sustainable Yield . ....... 37 2.9 Nonlinear Stability Theorems . .... 38 2.10 Solving ODE Systems with matrix exponentiation . ......... 40 2.11 Taylor’s Formula for Functions of Multiple Variables . ............ 44 2.12 ProofofPart1ofPoincare–Perron . ..... 45 3 Uniqueness Theory 47 4 Existence Theory 50 1 Overview In these notes we consider the three main aspects of ODE analysis: (1) existence theory, (2) uniqueness theory, and (3) stability theory. In our study of existence theory we ask the most basic question: are the ODE we write down guaranteed to have solutions? Since in practice we solve most ODE numerically, it’s possible that if there is no theoretical solution the numerical values given will have no genuine relation with the physical system we want to analyze. In our study of uniqueness theory we assume a solution exists and ask if it is the only possible solution. If we are solving an ODE numerically we will only get one solution, and if solutions are not unique it may not be the physically interesting solution. While it’s standard in advanced ODE courses to study existence and uniqueness first and stability 1 later, we will start with stability in these note, because it’s the one most directly linked with the modeling process. -

Notes on Totally Categorical Theories
Notes on totally categorical theories Martin Ziegler 1991 0 Introduction Cherlin, Harrington and Lachlan’s paper on ω0-categorical, ω0-stable theories ([CHL]) was the starting point of geometrical stability theory. The progress made since then allows us better to understand what they did in modern terms (see [PI]) and also to push the description of totally categorical theories further, (see [HR1, AZ1, AZ2]). The first two sections of what follows give an exposition of the results of [CHL]. Then I explain how a totally categorical theory can be decomposed by a sequence of covers and in the last section I discuss the problem how covers can look like. I thank the parisian stabilists for their invation to lecture on these matters, and also for their help during the talks. 1 Fundamental Properties Let T be a totally categorical theory (i.e. T is a complete countable theory, without finite models which is categorical in all infinite cardinalities). Since T is ω1-categorical we know that a) T has finite Morley-rank, which coincides with the Lascar rank U. b) T is unidimensional : All non-algebraic types are non-orthogonal. The main result of [CHL] is that c) T is locally modular. A pregeometry X (i.e. a matroid) is modular if two subspaces are always independent over their intersection. X is called locally modular if two subspaces are independent over their intersection provided this intersection has positive dimension. A pregeometry is a geometry if the closure of the empty set is empty and the one-dimensional subspaces are singletons.