Embedded Linux Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

HTTP-FUSE Xenoppix
HTTP-FUSE Xenoppix Kuniyasu Suzaki† Toshiki Yagi† Kengo Iijima† Kenji Kitagawa†† Shuichi Tashiro††† National Institute of Advanced Industrial Science and Technology† Alpha Systems Inc.†† Information-Technology Promotion Agency, Japan††† {k.suzaki,yagi-toshiki,k-iijima}@aist.go.jp [email protected], [email protected] Abstract a CD-ROM. Furthermore it requires remaking the entire CD-ROM when a bit of data is up- dated. The other solution is a Virtual Machine We developed “HTTP-FUSE Xenoppix” which which enables us to install many OSes and ap- boots Linux, Plan9, and NetBSD on Virtual plications easily. However, that requires in- Machine Monitor “Xen” with a small bootable stalling virtual machine software. (6.5MB) CD-ROM. The bootable CD-ROM in- cludes boot loader, kernel, and miniroot only We have developed “Xenoppix” [1], which and most part of files are obtained via Internet is a combination of CD/DVD bootable Linux with network loopback device HTTP-FUSE “KNOPPIX” [2] and Virtual Machine Monitor CLOOP. It is made from cloop (Compressed “Xen” [3, 4]. Xenoppix boots Linux (KNOP- Loopback block device) and FUSE (Filesys- PIX) as Host OS and NetBSD or Plan9 as Guest tem USErspace). HTTP-FUSE CLOOP can re- OS with a bootable DVD only. KNOPPIX construct a block device from many small block is advanced in automatic device detection and files of HTTP servers. In this paper we describe driver integration. It prepares the Xen environ- the detail of the implementation and its perfor- ment and Guest OSes don’t need to worry about mance. lack of device drivers. -

How to Create a Custom Live CD for Secure Remote Incident Handling in the Enterprise
How to Create a Custom Live CD for Secure Remote Incident Handling in the Enterprise Abstract This paper will document a process to create a custom Live CD for secure remote incident handling on Windows and Linux systems. The process will include how to configure SSH for remote access to the Live CD even when running behind a NAT device. The combination of customization and secure remote access will make this process valuable to incident handlers working in enterprise environments with limited remote IT support. Bert Hayes, [email protected] How to Create a Custom Live CD for Remote Incident Handling 2 Table of Contents Abstract ...........................................................................................................................................1 1. Introduction ............................................................................................................................5 2. Making Your Own Customized Debian GNU/Linux Based System........................................7 2.1. The Development Environment ......................................................................................7 2.2. Making Your Dream Incident Handling System...............................................................9 2.3. Hardening the Base Install.............................................................................................11 2.3.1. Managing Root Access with Sudo..........................................................................11 2.4. Randomizing the Handler Password at Boot Time ........................................................12 -
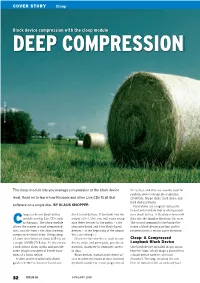
Deep Compression
COVER STORY Cloop DEEPBlock device compression COMPRESSION with the cloop module KYRO, photocase.com KYRO, The cloop module lets you manage compression at the block device 512 bytes), and they are usually used for random access storage like ramdisks, level. Read on to learn how Knoppix and other Live CDs fit all that CD-ROMs, floppy disks, hard disks, and hard disk partitions. software on a single disc. BY KLAUS KNOPPER Filesystems are a logical representa- tion of ordered data that is often present loop is a kernel block device block-based devices. If you look into the on a block device. A filesystem turns raw module used in Live CDs such output of ls -l /dev, you will easily recog- data into the familiar directory/file view. Cas Knoppix. The cloop module nize these devices by the prefix – c for The mount command is the bridge be- allows the system to read compressed character-based and b for block-based tween a block device partition and its data, usually from a file, thus creating devices – at the beginning of the output projection into a mount point directory. compressed virtual disks. Using cloop, line (see Listing 1). a Linux installation of about 2GB fits on Character-based devices, such as tape Cloop: A Compressed a single 700MB CD-R disc. In this article, drives, mice, and gamepads, provide se- Loopback Block Device I look at how cloop works and provide quential, character-by-character access One block device included in any Linux some insight into general kernel struc- to data. -
Training Embedded Linux with Ac6 System Workbench: Implementing Linux on Embedded Systems - Operating Systems: Linux
Training Embedded Linux with Ac6 System Workbench: Implementing Linux on Embedded Systems - Operating Systems: Linux D1S - Embedded Linux with Ac6 System Workbench Implementing Linux on Embedded Systems Objectives Understanding the architecture of the Linux system Learn how to install Linux on your hardware and create a BSP Explore the Linux system architecture Booting Linux Initializing the system Install existing packages on the target Learn how to install Linux on flash chips Labs are conducted on target boards, that can be: Dual Cortex/A7-based "STM32MP15-DISCO" boards from STMicroelectronics. Quad Cortex/A9-based "SabreLite" boards from NXP. Quad Cortex/A53-based "imx8q-evk" boards from NXP. We use a recent (4.x) linux kernel, as supported by the chip supplier. All labs are conducted using the System Workbench for Linux IDE. Course environment Printed course material (in English) One Linux PC for two trainees. One target platform for two trainees A version of “Ac6 System Workbench for Linux – Basic Edition” is provided free of charge to each trainee Prerequisite Good C programming skills Knowledge of Linux user programming (see our D0 - Linux User Mode Programming course) Preferably knowledge of Linux kernel and driver programming (see our D3 - Linux Drivers course) D1S - Embedded Linux with Ac6 System Workbench 09/28/21 Plan First Day Introduction to Linux Linux history and Version management Linux system architecture Processes and MMU System calls Shared libraries Linux components Toolchain Bootloader Kernel Root file system Linux -
Embedded Linux Training
Free Electrons Embedded Linux training Gregory Clement Thomas Petazzoni Michael Opdenacker Free Electrons. Kernel, drivers and embedded Linux development, consulting, training and support. http//free-electrons.com Rights to copy © Copyright 2004-2011, Free Electrons [email protected] Electronic version of this document available on http://free-electrons.com/doc/training/embedded-linux Updates will be available on http://free-electrons.com/doc/training/embedded-linux/ Attribution ± ShareAlike 3.0 Corrections, suggestions, You are free contributions and translations are welcome! to copy, distribute, display, and perform the work to make derivative works Latest update: Feb 14, 2011 to make commercial use of the work Under the following conditions Attribution. You must give the original author credit. Share Alike. If you alter, transform, or build upon this work, you may distribute the resulting work only under a license identical to this one. For any reuse or distribution, you must make clear to others the license terms of this work. Any of these conditions can be waived if you get permission from the copyright holder. Your fair use and other rights are in no way affected by the above. License text: http://creativecommons.org/licenses/by-sa/3.0/legalcode Free Electrons. Kernel, drivers and embedded Linux development, consulting, training and support. http//free-electrons.com Linux kernel Linux device drivers Free Electrons Board support code Our services Mainstreaming kernel code Kernel debugging Custom Development System integration -

Implantación De Linux Sobre Microcontroladores
Embedded Linux system development Embedded Linux system development DSI Embedded Linux Free Electrons Developers © Copyright 2004-2018, Free Electrons. Creative Commons BY-SA 3.0 license. Latest update: March 14, 2018. Document updates and sources: http://free-electrons.com/doc/training/embedded-linux Corrections, suggestions, contributions and translations are welcome! DSI - FCEIA http://dsi.fceia.unr.edu.ar 1/263 Derechos de copia © Copyright 2018, Luciano Diamand Licencia: Creative Commons Attribution - Share Alike 3.0 http://creativecommons.org/licenses/by-sa/3.0/legalcode Ud es libre de: I copiar, distribuir, mostrar y realizar el trabajo I hacer trabajos derivados I hacer uso comercial del trabajo Bajo las siguientes condiciones: I Atribuci´on. Debes darle el cr´editoal autor original. I Compartir por igual. Si altera, transforma o construye sobre este trabajo, usted puede distribuir el trabajo resultante solamente bajo una licencia id´enticaa ´esta. I Para cualquier reutilizaci´ono distribuci´on,debe dejar claro a otros los t´erminos de la licencia de este trabajo. I Se puede renunciar a cualquiera de estas condiciones si usted consigue el permiso del titular de los derechos de autor. El uso justo y otros derechos no se ven afectados por lo anterior. DSI - FCEIA http://dsi.fceia.unr.edu.ar 2/263 Hiperv´ınculosen el documento Hay muchos hiperv´ınculosen el documento I Hiperv´ıncluosregulares: http://kernel.org/ I Enlaces a la documentaci´ondel Kernel: Documentation/kmemcheck.txt I Enlaces a los archivos fuente y directorios del kernel: drivers/input include/linux/fb.h I Enlaces a declaraciones, definiciones e instancias de los simbolos del kernel (funciones, tipos, datos, estructuras): platform_get_irq() GFP_KERNEL struct file_operations DSI - FCEIA http://dsi.fceia.unr.edu.ar 3/263 Introducci´ona Linux Embebido Introducci´ona DSI Linux Embebido Embedded Linux Developers Free Electrons © Copyright 2004-2018, Free Electrons. -
Linux Embebido Workshop Linux Embebido
Linux embebido Workshop Linux Embebido Lucas Chiesa Joaquín de Andrés Germán Bassi Laboratorio Sistemas embebidos FIUBA Creative Commons BY-SA 3.0 license Basado en : http://free-electrons.com/docs/embedded-linux-intro ¿Sistema embebido? Un sistema embebido o empotrado es un sistema de computación diseñado para realizar una o algunas pocas funciones dedicadas frecuentemente en un sistema de computación en tiempo real. Los sistemas embebidos se utilizan para usos muy diferentes a los usos generales a los que se suelen someter a las computadoras personales. Wikipedia, http://es.wikipedia.org/wiki/Sistema_embebido SASE 2011 - Workshop Linux embebido 2 Muchos sistemas diferentes Es una definición muy genérica: Cubre muchos tipos diferentes de sistemas Linea borrosa con sistemas tradicionales Productos ªConsumer electronics (CE)º: Routers hogareños, reproductores de DVD, Televisores, cámaras digitales, GPS, celulares ... Productos industriales: Controladores de máquinas, alarmas, equipos de vigilancia, autos, satélites... SASE 2011 - Workshop Linux embebido 3 Muchos productos diferentes SASE 2011 - Workshop Linux embebido 4 Linux Embebido El Software Libre y Abierto ofrece una rango muy amplio de herramientas para desarrollar sistemas embebidos. Ventajas Reutilizar componentes existentes para el sistema base. Permite concentrarse en el valor agregado del producto. Componentes de alta calidad y muy probados. (Kernel Linux , librerías de C ...) Control completo sobre la elección de componentes. Modificaciones posibles ilimitadas. Soporte por la comunidades: tutoriales, listas de correo... Bajo costo, sin licencias por unidad. Acceso más simple al software y a las herramientas. SASE 2011 - Workshop Linux embebido 5 Ejemplos de dispositivos GPS: TomTom y Garmin Routers hogareños: Linksys, Netgear PDA: Zaurus, Nokia N8x0 TVs, DVDs: Sony, Philips, .. -
Starting with the Yocto Project
FOSDEM 2015 Starting with the Yocto Project Alexandre Belloni Free Electrons [email protected] Put your business card in the box to participate in the raffle! Free Electrons. Kernel, drivers and embedded Linux development, consulting, training and support. http://free-electrons.com 1/74 Alexandre Belloni I Embedded Linux engineer at Free Electrons I Embedded Linux expertise Free Electrons I Development, consulting and training I Strong open-source focus Embedded Linux Developers I Open-source contributor I Contributing the kernel support for Atmel ARM processors I Contributing the kernel support for Marvell ARM (Berlin) processors I Maintainer of the Crystalfontz boards in the meta-fsl-arm layer Free Electrons. Kernel, drivers and embedded Linux development, consulting, training and support. http://free-electrons.com 2/74 What is the Yocto Project ? I Umbrella project, including: I pseudo I cross-prelink I matchbox I opkg I psplash I ... I The core components of the Yocto Project are: I BitBake, the build engine. It is a task scheduler, like make. It interprets configuration files and recipes (also called metadata) to perform a set of tasks, to download, configure and build specified packages and filesystem images. I OpenEmbedded-Core, a set of base layers. It is a set of recipes, layers and classes which are shared between all OpenEmbedded based systems. I Poky, the reference system. It is a collection of projects and tools, used to bootstrap a new distribution based on the Yocto Project. Free Electrons. Kernel, drivers and embedded Linux development, consulting, training and support. http://free-electrons.com 3/74 The Yocto Project lexicon Free Electrons. -

QEMU Version 4.2.0 User Documentation I
QEMU version 4.2.0 User Documentation i Table of Contents 1 Introduction ::::::::::::::::::::::::::::::::::::: 1 1.1 Features :::::::::::::::::::::::::::::::::::::::::::::::::::::::: 1 2 QEMU PC System emulator ::::::::::::::::::: 2 2.1 Introduction :::::::::::::::::::::::::::::::::::::::::::::::::::: 2 2.2 Quick Start::::::::::::::::::::::::::::::::::::::::::::::::::::: 2 2.3 Invocation :::::::::::::::::::::::::::::::::::::::::::::::::::::: 3 2.3.1 Standard options :::::::::::::::::::::::::::::::::::::::::: 3 2.3.2 Block device options :::::::::::::::::::::::::::::::::::::: 12 2.3.3 USB options:::::::::::::::::::::::::::::::::::::::::::::: 23 2.3.4 Display options ::::::::::::::::::::::::::::::::::::::::::: 23 2.3.5 i386 target only::::::::::::::::::::::::::::::::::::::::::: 30 2.3.6 Network options :::::::::::::::::::::::::::::::::::::::::: 31 2.3.7 Character device options:::::::::::::::::::::::::::::::::: 38 2.3.8 Bluetooth(R) options ::::::::::::::::::::::::::::::::::::: 42 2.3.9 TPM device options :::::::::::::::::::::::::::::::::::::: 43 2.3.10 Linux/Multiboot boot specific ::::::::::::::::::::::::::: 44 2.3.11 Debug/Expert options ::::::::::::::::::::::::::::::::::: 45 2.3.12 Generic object creation :::::::::::::::::::::::::::::::::: 54 2.3.13 Device URL Syntax ::::::::::::::::::::::::::::::::::::: 66 2.4 Keys in the graphical frontends :::::::::::::::::::::::::::::::: 69 2.5 Keys in the character backend multiplexer ::::::::::::::::::::: 69 2.6 QEMU Monitor ::::::::::::::::::::::::::::::::::::::::::::::: 70 2.6.1 Commands ::::::::::::::::::::::::::::::::::::::::::::::: -

Smaller Flight Data Recorders{
Available online at http://docs.lib.purdue.edu/jate Journal of Aviation Technology and Engineering 2:2 (2013) 45–55 Smaller Flight Data Recorders{ Yair Wiseman and Alon Barkai Bar-Ilan University Abstract Data captured by flight data recorders are generally stored on the system’s embedded hard disk. A common problem is the lack of storage space on the disk. This lack of space for data storage leads to either a constant effort to reduce the space used by data, or to increased costs due to acquisition of additional space, which is not always possible. File compression can solve the problem, but carries with it the potential drawback of the increased overhead required when writing the data to the disk, putting an excessive load on the system and degrading system performance. The author suggests the use of an efficient compressed file system that both compresses data in real time and ensures that there will be minimal impact on the performance of other tasks. Keywords: flight data recorder, data compression, file system Introduction A flight data recorder is a small line-replaceable computer unit employed in aircraft. Its function is recording pilots’ inputs, electronic inputs, sensor positions and instructions sent to any electronic systems on the aircraft. It is unofficially referred to as a "black box". Flight data recorders are designed to be small and thoroughly fabricated to withstand the influence of high speed impacts and extreme temperatures. A flight data recorder from a commercial aircraft can be seen in Figure 1. State-of-the-art high density flash memory devices have permitted the solid state flight data recorder (SSFDR) to be implemented with much larger memory capacity. -

Embedded Real-Time Linux from Bootloader to Real-Time System (Linux RTOS) - Face-To-Face Training
As of 01.10.2021 Embedded Real-Time Linux from Bootloader to Real-Time System (Linux RTOS) - Face-to-Face Training Objectives If you have to build an embedded Linux target - how do you begin? What do you need? How do you get a real-time system? This embedded Linux training focuses on the setup and operation of an embedded Linux system with hard real-time requirements. In part 1, we start with the embedded board without SW and create the necessary components, from the bootloader to the finished real-time Linux operating system and the first embedded Linux application. You get familiar with the process and can transfer the new knowledge to your individual project and your target architecture. Part 2 highlights the scheduling and real-time features of the RT preemption patch. Operation and use in real-time relevant application systems as well as useful synchronization mechanisms are covered in detail. The tools used in the embedded Linux training are available for a wide variety of architectures. Thus, we make sure that you can apply the practical knowledge gained in the embedded Linux training when working with your embedded board. Participants The embedded Linux training addresses software developers and software architects. Requirements Profound ANSI-C programming knowledge as well as good basic knowledge of Linux Embedded Real-Time Linux from Bootloader to Real-Time System (Linux RTOS) - Face-to-Face Training Content Development Environment - Cross-development toolchain - Creating a toolchain, kernel and root filesystem --> build systems -

Training Embedded Linux with Yocto: Building Embedded Linux Platforms Using Yocto - Operating Systems: Linux
Training Embedded Linux with Yocto: Building embedded Linux platforms using Yocto - Operating Systems: Linux D1Y - Embedded Linux with Yocto Building embedded Linux platforms using Yocto Objectives Understanding the architecture of the Linux system Learn how to install Linux on your hardware and create a BSP Explore the Linux system architecture Booting Linux Initializing the system Install existing packages on the target Learn how to install Linux on flash chips Using and customizing Yocto Creating Yocto-based Embedded Linux platforms Using Yocto to develop components Labs can be conducted either on qemu or on target boards, that can be: Dual Cortex/A7-based "STM32MP15-DK2" boards from STMicroelectronics. Quad Cortex/A9-based "SabreLite" boards from NXP. Quad Cortex/A53-based "imx8q-evk" boards from NXP. We use the latest Yocto version supported by the chip provider We use a recent (4.x) linux kernel, as supported by the chip supplier Course environment Printed course material (in English) One Linux PC for two trainees. One target platform for two trainees (if not using qemu) Prerequisite Good C programming skills Knowledge of Linux user programming (see our D0 - Linux user mode programming course) Preferably knowledge of Linux kernel and driver programming (see our D3 - Linux Drivers course) Plan First Day Introduction to Linux D1Y - Embedded Linux with Yocto 10/01/21 Linux history and Version management Linux system architecture Processes and MMU System calls Shared libraries Linux system components Toolchain Bootloader Kernel Root