Developing a Ground-Based Search System for Transits of Extrasolar Planets
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Exploring Exoplanet Populations with NASA's Kepler Mission
SPECIAL FEATURE: PERSPECTIVE PERSPECTIVE SPECIAL FEATURE: Exploring exoplanet populations with NASA’s Kepler Mission Natalie M. Batalha1 National Aeronautics and Space Administration Ames Research Center, Moffett Field, 94035 CA Edited by Adam S. Burrows, Princeton University, Princeton, NJ, and accepted by the Editorial Board June 3, 2014 (received for review January 15, 2014) The Kepler Mission is exploring the diversity of planets and planetary systems. Its legacy will be a catalog of discoveries sufficient for computing planet occurrence rates as a function of size, orbital period, star type, and insolation flux.The mission has made significant progress toward achieving that goal. Over 3,500 transiting exoplanets have been identified from the analysis of the first 3 y of data, 100 planets of which are in the habitable zone. The catalog has a high reliability rate (85–90% averaged over the period/radius plane), which is improving as follow-up observations continue. Dynamical (e.g., velocimetry and transit timing) and statistical methods have confirmed and characterized hundreds of planets over a large range of sizes and compositions for both single- and multiple-star systems. Population studies suggest that planets abound in our galaxy and that small planets are particularly frequent. Here, I report on the progress Kepler has made measuring the prevalence of exoplanets orbiting within one astronomical unit of their host stars in support of the National Aeronautics and Space Admin- istration’s long-term goal of finding habitable environments beyond the solar system. planet detection | transit photometry Searching for evidence of life beyond Earth is the Sun would produce an 84-ppm signal Translating Kepler’s discovery catalog into one of the primary goals of science agencies lasting ∼13 h. -
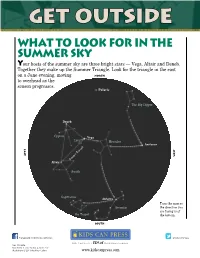
Get Outside What to Look for in the Summer Sky Your Hosts of the Summer Sky Are Three Bright Stars — Vega, Altair and Deneb
Get Outside What to Look for in the Summer Sky Your hosts of the summer sky are three bright stars — Vega, Altair and Deneb. Together they make up the Summer Triangle. Look for the triangle in the east on a June evening, moving NORTH to overhead as the season progresses. Polaris The Big Dipper Deneb Cygnus Vega Lyra Hercules Arcturus EaST West Summer Triangle Altair Aquila Sagittarius Antares Turn the map so Scorpius the direction you are facing is at the Teapot the bottom. south facebook.com/KidsCanBooks @KidsCanPress GET OUTSIDE Text © 2013 Jane Drake & Ann Love Illustrations © 2013 Heather Collins www.kidscanpress.com Get Outside Vega The Keystone The brightest star in the Between Vega and Arcturus, Summer Triangle, Vega is look for four stars in a wedge or The summer bluish white. It is in the keystone shape. This is the body solstice constellation Lyra, the Harp. of Hercules, the Strongman. His feet are to the north and Every day from late Altair his arms to the south, making December to June, the The second-brightest star in his figure kneel Sun rises and sets a little the triangle, Altair is white. upside down farther north along the Altair is in the constellation in the sky. horizon. But about June Aquila, the Eagle. 21, the Sun seems to stop Keystone moving north. It rises in Deneb the northeast and sets in The dimmest star of the the northwest, seemingly Summer Triangle, Deneb would in the same spots for be the brightest if it were not so Hercules several days. -

Exomoon Habitability Constrained by Illumination and Tidal Heating
submitted to Astrobiology: April 6, 2012 accepted by Astrobiology: September 8, 2012 published in Astrobiology: January 24, 2013 this updated draft: October 30, 2013 doi:10.1089/ast.2012.0859 Exomoon habitability constrained by illumination and tidal heating René HellerI , Rory BarnesII,III I Leibniz-Institute for Astrophysics Potsdam (AIP), An der Sternwarte 16, 14482 Potsdam, Germany, [email protected] II Astronomy Department, University of Washington, Box 951580, Seattle, WA 98195, [email protected] III NASA Astrobiology Institute – Virtual Planetary Laboratory Lead Team, USA Abstract The detection of moons orbiting extrasolar planets (“exomoons”) has now become feasible. Once they are discovered in the circumstellar habitable zone, questions about their habitability will emerge. Exomoons are likely to be tidally locked to their planet and hence experience days much shorter than their orbital period around the star and have seasons, all of which works in favor of habitability. These satellites can receive more illumination per area than their host planets, as the planet reflects stellar light and emits thermal photons. On the contrary, eclipses can significantly alter local climates on exomoons by reducing stellar illumination. In addition to radiative heating, tidal heating can be very large on exomoons, possibly even large enough for sterilization. We identify combinations of physical and orbital parameters for which radiative and tidal heating are strong enough to trigger a runaway greenhouse. By analogy with the circumstellar habitable zone, these constraints define a circumplanetary “habitable edge”. We apply our model to hypothetical moons around the recently discovered exoplanet Kepler-22b and the giant planet candidate KOI211.01 and describe, for the first time, the orbits of habitable exomoons. -
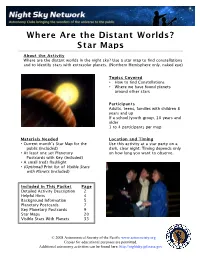
Where Are the Distant Worlds? Star Maps
W here Are the Distant Worlds? Star Maps Abo ut the Activity Whe re are the distant worlds in the night sky? Use a star map to find constellations and to identify stars with extrasolar planets. (Northern Hemisphere only, naked eye) Topics Covered • How to find Constellations • Where we have found planets around other stars Participants Adults, teens, families with children 8 years and up If a school/youth group, 10 years and older 1 to 4 participants per map Materials Needed Location and Timing • Current month's Star Map for the Use this activity at a star party on a public (included) dark, clear night. Timing depends only • At least one set Planetary on how long you want to observe. Postcards with Key (included) • A small (red) flashlight • (Optional) Print list of Visible Stars with Planets (included) Included in This Packet Page Detailed Activity Description 2 Helpful Hints 4 Background Information 5 Planetary Postcards 7 Key Planetary Postcards 9 Star Maps 20 Visible Stars With Planets 33 © 2008 Astronomical Society of the Pacific www.astrosociety.org Copies for educational purposes are permitted. Additional astronomy activities can be found here: http://nightsky.jpl.nasa.gov Detailed Activity Description Leader’s Role Participants’ Roles (Anticipated) Introduction: To Ask: Who has heard that scientists have found planets around stars other than our own Sun? How many of these stars might you think have been found? Anyone ever see a star that has planets around it? (our own Sun, some may know of other stars) We can’t see the planets around other stars, but we can see the star. -

The Copernican Principle Rules out BLC1 As a Technological Radio Signal from the Alpha Centauri System
Draft version January 13, 2021 Typeset using LATEX twocolumn style in AASTeX62 The Copernican Principle Rules Out BLC1 as a Technological Radio Signal from the Alpha Centauri System Amir Siraj1 and Abraham Loeb1 1Department of Astronomy, Harvard University, 60 Garden Street, Cambridge, MA 02138, USA ABSTRACT Without evidence for occupying a special time or location, we should not assume that we inhabit privileged circumstances in the Universe. As a result, within the context of all Earth-like planets orbiting Sun-like stars, the origin of a technological civilization on Earth should be considered a single outcome of a random process. We show that in such a Copernican framework, which is inherently optimistic about the prevalence of life in the Universe, the likelihood of the nearest star system, Alpha Centauri, hosting a radio-transmitting civilization is ∼ 10−8. This rules out, a priori, Breakthrough Listen Candidate 1 (BLC1) as a technological radio signal from the Alpha Centauri system, as such a scenario would violate the Copernican principle by about eight orders of magnitude. We also show that the Copernican principle is consistent with the vast majority of Fast Radio Bursts being natural in origin. Keywords: technosignatures; astrobiology; search for extraterrestrial intelligence; biosignatures 1. INTRODUCTION lihood of searches for primitive and intelligent life, us- The Copernican principle asserts that we are not priv- ing a Drake-type approach. Westby & Conselice(2020) ileged observers of the Universe. Successes of its appli- applied the Copernican principle to the search for intel- cation include the rejection of Ptolemaic geocentrism ligent life, but in forms that featured strict boundaries and the adoption of the modern cosmological princi- in time, thereby not reflecting a truly random process. -

YETI – Search for Young Transiting Planets
YETI – search for young transiting planets Ronny Errmann, Astrophysikalisches Institut und Universitäts-Sternwarte Jena, in collaboration with: Ralph Neuhäuser, AIU Jena Gracjan Maciejewski, Centre for Astronomy of the Nicolaus Copernicus University Ronald Redmer, University of Rostock Martin Seeliger, AIU Jena YETI Observers, all over the world Mercury transit Hot Planets and Cool Stars 8. Nov. 06 (SOHO) Garching 12. November 2012 Venus transit 6. June 12 Motivation youngest transiting planets: ●Corot 2: 130 – 500 Myr (from star spots) 30 – 40 Myr (from planet radius) ●Corot 20: 100 – 800 Myr (from Li-abundance) M = 1 MJup ●Wasp 10: 200 – 350 Myr (from gyro-chronology) → younger transiting planets (Radius+true Mass) needed, to test models, and planet formation scenarios Observation strategies increase probability for transiting planet: monitoring of many young stars -> Young open clusters orbital periods: ~1 to ~10 days transit duration: ~1 to few hours → 1 to 5% of orbit in transit phase observation with single telescope: data gaps because of daytime, weather, ... increase probability for observing transit signal: long continuous observation -> YETI YETI-network (Young Exoplanet Transit Initiative) Tenagra II Llano del Gettysburg Sierra Nevada Jena Stara Lesna Byurakan Xinglong Gunma Hato Astrophysical 0.8-m telescope Observatory Collage Astronomical 1.0 and 2.6 Observatory Astronomical 1.5-m telescope Institute Observatory Institute telescopes 90/60 cm Observatory 0.9/0.6-m 0.6-m telescope 1.5-m telescope 1-m Schmidt 0.4-m telescope -

Naming the Extrasolar Planets
Naming the extrasolar planets W. Lyra Max Planck Institute for Astronomy, K¨onigstuhl 17, 69177, Heidelberg, Germany [email protected] Abstract and OGLE-TR-182 b, which does not help educators convey the message that these planets are quite similar to Jupiter. Extrasolar planets are not named and are referred to only In stark contrast, the sentence“planet Apollo is a gas giant by their assigned scientific designation. The reason given like Jupiter” is heavily - yet invisibly - coated with Coper- by the IAU to not name the planets is that it is consid- nicanism. ered impractical as planets are expected to be common. I One reason given by the IAU for not considering naming advance some reasons as to why this logic is flawed, and sug- the extrasolar planets is that it is a task deemed impractical. gest names for the 403 extrasolar planet candidates known One source is quoted as having said “if planets are found to as of Oct 2009. The names follow a scheme of association occur very frequently in the Universe, a system of individual with the constellation that the host star pertains to, and names for planets might well rapidly be found equally im- therefore are mostly drawn from Roman-Greek mythology. practicable as it is for stars, as planet discoveries progress.” Other mythologies may also be used given that a suitable 1. This leads to a second argument. It is indeed impractical association is established. to name all stars. But some stars are named nonetheless. In fact, all other classes of astronomical bodies are named. -
On the Detection of Exoplanets Via Radial Velocity Doppler Spectroscopy
The Downtown Review Volume 1 Issue 1 Article 6 January 2015 On the Detection of Exoplanets via Radial Velocity Doppler Spectroscopy Joseph P. Glaser Cleveland State University Follow this and additional works at: https://engagedscholarship.csuohio.edu/tdr Part of the Astrophysics and Astronomy Commons How does access to this work benefit ou?y Let us know! Recommended Citation Glaser, Joseph P.. "On the Detection of Exoplanets via Radial Velocity Doppler Spectroscopy." The Downtown Review. Vol. 1. Iss. 1 (2015) . Available at: https://engagedscholarship.csuohio.edu/tdr/vol1/iss1/6 This Article is brought to you for free and open access by the Student Scholarship at EngagedScholarship@CSU. It has been accepted for inclusion in The Downtown Review by an authorized editor of EngagedScholarship@CSU. For more information, please contact [email protected]. Glaser: Detection of Exoplanets 1 Introduction to Exoplanets For centuries, some of humanity’s greatest minds have pondered over the possibility of other worlds orbiting the uncountable number of stars that exist in the visible universe. The seeds for eventual scientific speculation on the possibility of these "exoplanets" began with the works of a 16th century philosopher, Giordano Bruno. In his modernly celebrated work, On the Infinite Universe & Worlds, Bruno states: "This space we declare to be infinite (...) In it are an infinity of worlds of the same kind as our own." By the time of the European Scientific Revolution, Isaac Newton grew fond of the idea and wrote in his Principia: "If the fixed stars are the centers of similar systems [when compared to the solar system], they will all be constructed according to a similar design and subject to the dominion of One." Due to limitations on observational equipment, the field of exoplanetary systems existed primarily in theory until the late 1980s. -

Extra-Solar Planetary Systems
From the Academy Extra-solar planetary systems Joan Najita*†, Willy Benz‡, and Artie Hatzes§ *National Optical Astronomy Observatories, 950 North Cherry Avenue, Tucson, AZ 85719; ‡Physikalisches Institut, Universita¨t Bern, Sidlerstrasse 5, Ch-3012, Bern, Switzerland; and §McDonald Observatory, University of Texas, Austin, TX 78712 he discovery of extra-solar planets has captured the imagi- Table 1. Properties of extra-solar planet candidates Tnation and interest of the public and scientific communities K, alike, and for the same reasons: we are all want to know the Parent star M sin i Period, days a,AU e m⅐sϪ1 answers to questions such as ‘‘Where do we come from?’’ and ‘‘Are we alone?’’ Throughout this century, popular culture has HD 187123 0.52 3.097 0.042 0. 72. presumed the existence of other worlds and extra-terrestrial Bootis 3.64 3.3126 0.042 0. 469. intelligence. As a result, the annals of popular culture are filled HD 75289 0.42 3.5097 0.046 0. 54. with thoughts on what extra-solar planets and their inhabitants 51 Peg 0.44 4.2308 0.051 0.01 56. are like. And now toward the end of the century, astronomers And b 0.71 4.617 0.059 0.034 73.0 have managed to confirm at least one aspect of this speculative HD 217107 1.28 7.11 0.07 0.14 140. search for understanding in finding convincing evidence of Gliese 86 3.6 15.83 0.11 0.042 379. planets beyond the solar system. 1 Cancri 0.85 14.656 0.12 0.03 75.8 The discovery of extra-solar planets has brought with it a HD 195019 3.43 18.3 0.14 0.05 268. -
The Maunder Minimum and the Variable Sun-Earth Connection
The Maunder Minimum and the Variable Sun-Earth Connection (Front illustration: the Sun without spots, July 27, 1954) By Willie Wei-Hock Soon and Steven H. Yaskell To Soon Gim-Chuan, Chua Chiew-See, Pham Than (Lien+Van’s mother) and Ulla and Anna In Memory of Miriam Fuchs (baba Gil’s mother)---W.H.S. In Memory of Andrew Hoff---S.H.Y. To interrupt His Yellow Plan The Sun does not allow Caprices of the Atmosphere – And even when the Snow Heaves Balls of Specks, like Vicious Boy Directly in His Eye – Does not so much as turn His Head Busy with Majesty – ‘Tis His to stimulate the Earth And magnetize the Sea - And bind Astronomy, in place, Yet Any passing by Would deem Ourselves – the busier As the Minutest Bee That rides – emits a Thunder – A Bomb – to justify Emily Dickinson (poem 224. c. 1862) Since people are by nature poorly equipped to register any but short-term changes, it is not surprising that we fail to notice slower changes in either climate or the sun. John A. Eddy, The New Solar Physics (1977-78) Foreword By E. N. Parker In this time of global warming we are impelled by both the anticipated dire consequences and by scientific curiosity to investigate the factors that drive the climate. Climate has fluctuated strongly and abruptly in the past, with ice ages and interglacial warming as the long term extremes. Historical research in the last decades has shown short term climatic transients to be a frequent occurrence, often imposing disastrous hardship on the afflicted human populations. -

Simulating (Sub)Millimeter Observations of Exoplanet Atmospheres in Search of Water
University of Groningen Kapteyn Astronomical Institute Simulating (Sub)Millimeter Observations of Exoplanet Atmospheres in Search of Water September 5, 2018 Author: N.O. Oberg Supervisor: Prof. Dr. F.F.S. van der Tak Abstract Context: Spectroscopic characterization of exoplanetary atmospheres is a field still in its in- fancy. The detection of molecular spectral features in the atmosphere of several hot-Jupiters and hot-Neptunes has led to the preliminary identification of atmospheric H2O. The Atacama Large Millimiter/Submillimeter Array is particularly well suited in the search for extraterrestrial water, considering its wavelength coverage, sensitivity, resolving power and spectral resolution. Aims: Our aim is to determine the detectability of various spectroscopic signatures of H2O in the (sub)millimeter by a range of current and future observatories and the suitability of (sub)millimeter astronomy for the detection and characterization of exoplanets. Methods: We have created an atmospheric modeling framework based on the HAPI radiative transfer code. We have generated planetary spectra in the (sub)millimeter regime, covering a wide variety of possible exoplanet properties and atmospheric compositions. We have set limits on the detectability of these spectral features and of the planets themselves with emphasis on ALMA. We estimate the capabilities required to study exoplanet atmospheres directly in the (sub)millimeter by using a custom sensitivity calculator. Results: Even trace abundances of atmospheric water vapor can cause high-contrast spectral ab- sorption features in (sub)millimeter transmission spectra of exoplanets, however stellar (sub) millime- ter brightness is insufficient for transit spectroscopy with modern instruments. Excess stellar (sub) millimeter emission due to activity is unlikely to significantly enhance the detectability of planets in transit except in select pre-main-sequence stars. -

A Review on Substellar Objects Below the Deuterium Burning Mass Limit: Planets, Brown Dwarfs Or What?
geosciences Review A Review on Substellar Objects below the Deuterium Burning Mass Limit: Planets, Brown Dwarfs or What? José A. Caballero Centro de Astrobiología (CSIC-INTA), ESAC, Camino Bajo del Castillo s/n, E-28692 Villanueva de la Cañada, Madrid, Spain; [email protected] Received: 23 August 2018; Accepted: 10 September 2018; Published: 28 September 2018 Abstract: “Free-floating, non-deuterium-burning, substellar objects” are isolated bodies of a few Jupiter masses found in very young open clusters and associations, nearby young moving groups, and in the immediate vicinity of the Sun. They are neither brown dwarfs nor planets. In this paper, their nomenclature, history of discovery, sites of detection, formation mechanisms, and future directions of research are reviewed. Most free-floating, non-deuterium-burning, substellar objects share the same formation mechanism as low-mass stars and brown dwarfs, but there are still a few caveats, such as the value of the opacity mass limit, the minimum mass at which an isolated body can form via turbulent fragmentation from a cloud. The least massive free-floating substellar objects found to date have masses of about 0.004 Msol, but current and future surveys should aim at breaking this record. For that, we may need LSST, Euclid and WFIRST. Keywords: planetary systems; stars: brown dwarfs; stars: low mass; galaxy: solar neighborhood; galaxy: open clusters and associations 1. Introduction I can’t answer why (I’m not a gangstar) But I can tell you how (I’m not a flam star) We were born upside-down (I’m a star’s star) Born the wrong way ’round (I’m not a white star) I’m a blackstar, I’m not a gangstar I’m a blackstar, I’m a blackstar I’m not a pornstar, I’m not a wandering star I’m a blackstar, I’m a blackstar Blackstar, F (2016), David Bowie The tenth star of George van Biesbroeck’s catalogue of high, common, proper motion companions, vB 10, was from the end of the Second World War to the early 1980s, and had an entry on the least massive star known [1–3].