Position on the Earth
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Georeferencing Accuracy of Geoeye-1 Stereo Imagery: Experiences in a Japanese Test Field
International Archives of the Photogrammetry, Remote Sensing and Spatial Information Science, Volume XXXVIII, Part 8, Kyoto Japan 2010 GEOREFERENCING ACCURACY OF GEOEYE-1 STEREO IMAGERY: EXPERIENCES IN A JAPANESE TEST FIELD Y. Meguro a, *, C.S.Fraser b a Japan Space Imaging Corp., 8-1Yaesu 2-Chome, Chuo-Ku, Tokyo 104-0028, Japan - [email protected] b Department of Geomatics, University of Melbourne VIC 3010, Australia - [email protected] Commission VIII, Working Group ICWG IV/VIII KEY WORDS: GeoEye-1, Stereo, RPCs, geopositioning, accuracy evaluation, bias compensation, satellite imagery ABSTRACT: High-resolution satellite imagery (HRSI) is being increasingly employed for large-scale topographic mapping, and especially for geodatabase updating. As the spatial resolution of HRSI sensors increases, so the potential georeferencing accuracy also improves. However, accuracy is not a function of spatial resolution alone, as it is also dependent upon radiometric image quality, the dynamics of the image scanning, and the fidelity of the sensor orientation model, both directly from orbit and attitude observations and indirectly from ground control points (GCPs). Users might anticipate accuracies of, say, 1 pixel in planimetry and 1-3 pixels in height when using GCPs. However, there are practical and in some cases administrative/legal imperatives for the georeferencing accuracy of HRSI systems to be quantified through well controlled tests. This paper discusses an investigation into the georeferencing accuracy attainable from the GeoEye-1 satellite, and specifically the 3D accuracy achievable from stereo imagery. Both direct georeferencing via supplied RPCs and indirect georeferencing via ground control and bias-corrected RPCs were examined for a stereo pair of pansharpened GeoEye-1 Basic images covering the Tsukuba Test Field in Japan, which contains more than 100 precisely surveyed and image identifiable GCPs. -

Ts 144 031 V12.3.0 (2015-07)
ETSI TS 1144 031 V12.3.0 (201515-07) TECHNICAL SPECIFICATION Digital cellular telecocommunications system (Phahase 2+); Locatcation Services (LCS); Mobile Station (MS) - SeServing Mobile Location Centntre (SMLC) Radio Resosource LCS Protocol (RRLP) (3GPP TS 44.0.031 version 12.3.0 Release 12) R GLOBAL SYSTTEM FOR MOBILE COMMUNUNICATIONS 3GPP TS 44.031 version 12.3.0 Release 12 1 ETSI TS 144 031 V12.3.0 (2015-07) Reference RTS/TSGG-0244031vc30 Keywords GSM ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice The present document can be downloaded from: http://www.etsi.org/standards-search The present document may be made available in electronic versions and/or in print. The content of any electronic and/or print versions of the present document shall not be modified without the prior written authorization of ETSI. In case of any existing or perceived difference in contents between such versions and/or in print, the only prevailing document is the print of the Portable Document Format (PDF) version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://portal.etsi.org/tb/status/status.asp If you find errors in the present document, please send your comment to one of the following services: https://portal.etsi.org/People/CommiteeSupportStaff.aspx Copyright Notification No part may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying and microfilm except as authorized by written permission of ETSI. -

Knowledge-Driven Geospatial Location Resolution for Phylogeographic
Bioinformatics, 31, 2015, i348–i356 doi: 10.1093/bioinformatics/btv259 ISMB/ECCB 2015 Knowledge-driven geospatial location resolution for phylogeographic models of virus migration Davy Weissenbacher1,*, Tasnia Tahsin1, Rachel Beard1,2, Mari Figaro1,2, Robert Rivera1, Matthew Scotch1,2 and Graciela Gonzalez1 1Department of Biomedical Informatics, Arizona State University, Scottsdale, AZ 85259, USA and 2Center for Environmental Security, Biodesign Institute, Arizona State University, Tempe, AZ 85287-5904, USA *To whom correspondence should be addressed. Abstract Summary: Diseases caused by zoonotic viruses (viruses transmittable between humans and ani- mals) are a major threat to public health throughout the world. By studying virus migration and mutation patterns, the field of phylogeography provides a valuable tool for improving their surveil- lance. A key component in phylogeographic analysis of zoonotic viruses involves identifying the specific locations of relevant viral sequences. This is usually accomplished by querying public data- bases such as GenBank and examining the geospatial metadata in the record. When sufficient detail is not available, a logical next step is for the researcher to conduct a manual survey of the corresponding published articles. Motivation: In this article, we present a system for detection and disambiguation of locations (topo- nym resolution) in full-text articles to automate the retrieval of sufficient metadata. Our system has been tested on a manually annotated corpus of journal articles related to phylogeography using inte- grated heuristics for location disambiguation including a distance heuristic, a population heuristic and a novel heuristic utilizing knowledge obtained from GenBank metadata (i.e. a ‘metadata heuristic’). Results: For detecting and disambiguating locations, our system performed best using the meta- data heuristic (0.54 Precision, 0.89 Recall and 0.68 F-score). -
Datum Transformations of GPS Positions Application Note
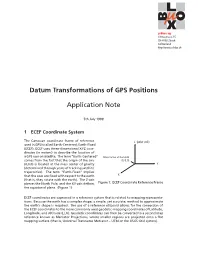
µ-blox ag Gloriastrasse 35 CH-8092 Zürich Switzerland http://www.u-blox.ch Datum Transformations of GPS Positions Application Note 5th July 1999 1 ECEF Coordinate System The Cartesian coordinate frame of reference used in GPS is called Earth-Centered, Earth-Fixed (ECEF). ECEF uses three-dimensional XYZ coor- dinates (in meters) to describe the location of a GPS user or satellite. The term "Earth-Centered" comes from the fact that the origin of the axis (0,0,0) is located at the mass center of gravity (determined through years of tracking satellite trajectories). The term "Earth-Fixed" implies that the axes are fixed with respect to the earth (that is, they rotate with the earth). The Z-axis pierces the North Pole, and the XY-axis defines Figure 1: ECEF Coordinate Reference Frame the equatorial plane. (Figure 1) ECEF coordinates are expressed in a reference system that is related to mapping representa- tions. Because the earth has a complex shape, a simple, yet accurate, method to approximate the earth’s shape is required. The use of a reference ellipsoid allows for the conversion of the ECEF coordinates to the more commonly used geodetic-mapping coordinates of Latitude, Longitude, and Altitude (LLA). Geodetic coordinates can then be converted to a second map reference known as Mercator Projections, where smaller regions are projected onto a flat mapping surface (that is, Universal Transverse Mercator – UTM or the USGS Grid system). 2 2 CONVERSION BETWEEN ECEF AND LOCAL TANGENTIAL PLANE A reference ellipsoid can be described by a series of parameters that define its shape and b e which include a semi-major axis ( a), a semi-minor axis ( ) and its first eccentricity ( )andits 0 second eccentricity ( e ) as shown in Figure 2. -

Part V: the Global Positioning System ______
PART V: THE GLOBAL POSITIONING SYSTEM ______________________________________________________________________________ 5.1 Background The Global Positioning System (GPS) is a satellite based, passive, three dimensional navigational system operated and maintained by the Department of Defense (DOD) having the primary purpose of supporting tactical and strategic military operations. Like many systems initially designed for military purposes, GPS has been found to be an indispensable tool for many civilian applications, not the least of which are surveying and mapping uses. There are currently three general modes that GPS users have adopted: absolute, differential and relative. Absolute GPS can best be described by a single user occupying a single point with a single receiver. Typically a lower grade receiver using only the coarse acquisition code generated by the satellites is used and errors can approach the 100m range. While absolute GPS will not support typical MDOT survey requirements it may be very useful in reconnaissance work. Differential GPS or DGPS employs a base receiver transmitting differential corrections to a roving receiver. It, too, only makes use of the coarse acquisition code. Accuracies are typically in the sub- meter range. DGPS may be of use in certain mapping applications such as topographic or hydrographic surveys. DGPS should not be confused with Real Time Kinematic or RTK GPS surveying. Relative GPS surveying employs multiple receivers simultaneously observing multiple points and makes use of carrier phase measurements. Relative positioning is less concerned with the absolute positions of the occupied points than with the relative vector (dX, dY, dZ) between them. 5.2 GPS Segments The Global Positioning System is made of three segments: the Space Segment, the Control Segment and the User Segment. -

Reference Systems for Surveying and Mapping Lecture Notes
Delft University of Technology Reference Systems for Surveying and Mapping Lecture notes Hans van der Marel ii The front cover shows the NAP (Amsterdam Ordnance Datum) ”datum point” at the Stopera, Amsterdam (picture M.M.Minderhoud, Wikipedia/Michiel1972). H. van der Marel Lecture notes on Reference Systems for Surveying and Mapping: CTB3310 Surveying and Mapping CTB3425 Monitoring and Stability of Dikes and Embankments CIE4606 Geodesy and Remote Sensing CIE4614 Land Surveying and Civil Infrastructure February 2020 Publisher: Faculty of Civil Engineering and Geosciences Delft University of Technology P.O. Box 5048 Stevinweg 1 2628 CN Delft The Netherlands Copyright ©20142020 by H. van der Marel The content in these lecture notes, except for material credited to third parties, is licensed under a Creative Commons AttributionsNonCommercialSharedAlike 4.0 International License (CC BYNCSA). Third party material is shared under its own license and attribution. The text has been type set using the MikTex 2.9 implementation of LATEX. Graphs and diagrams were produced, if not mentioned otherwise, with Matlab and Inkscape. Preface This reader on reference systems for surveying and mapping has been initially compiled for the course Surveying and Mapping (CTB3310) in the 3rd year of the BScprogram for Civil Engineering. The reader is aimed at students at the end of their BSc program or at the start of their MSc program, and is used in several courses at Delft University of Technology. With the advent of the Global Positioning System (GPS) technology in mobile (smart) phones and other navigational devices almost anyone, anywhere on Earth, and at any time, can determine a three–dimensional position accurate to a few meters. -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -

The Evolution of Earth Gravitational Models Used in Astrodynamics
JEROME R. VETTER THE EVOLUTION OF EARTH GRAVITATIONAL MODELS USED IN ASTRODYNAMICS Earth gravitational models derived from the earliest ground-based tracking systems used for Sputnik and the Transit Navy Navigation Satellite System have evolved to models that use data from the Joint United States-French Ocean Topography Experiment Satellite (Topex/Poseidon) and the Global Positioning System of satellites. This article summarizes the history of the tracking and instrumentation systems used, discusses the limitations and constraints of these systems, and reviews past and current techniques for estimating gravity and processing large batches of diverse data types. Current models continue to be improved; the latest model improvements and plans for future systems are discussed. Contemporary gravitational models used within the astrodynamics community are described, and their performance is compared numerically. The use of these models for solid Earth geophysics, space geophysics, oceanography, geology, and related Earth science disciplines becomes particularly attractive as the statistical confidence of the models improves and as the models are validated over certain spatial resolutions of the geodetic spectrum. INTRODUCTION Before the development of satellite technology, the Earth orbit. Of these, five were still orbiting the Earth techniques used to observe the Earth's gravitational field when the satellites of the Transit Navy Navigational Sat were restricted to terrestrial gravimetry. Measurements of ellite System (NNSS) were launched starting in 1960. The gravity were adequate only over sparse areas of the Sputniks were all launched into near-critical orbit incli world. Moreover, because gravity profiles over the nations of about 65°. (The critical inclination is defined oceans were inadequate, the gravity field could not be as that inclination, 1= 63 °26', where gravitational pertur meaningfully estimated. -

World Geodetic System 1984
World Geodetic System 1984 Responsible Organization: National Geospatial-Intelligence Agency Abbreviated Frame Name: WGS 84 Associated TRS: WGS 84 Coverage of Frame: Global Type of Frame: 3-Dimensional Last Version: WGS 84 (G1674) Reference Epoch: 2005.0 Brief Description: WGS 84 is an Earth-centered, Earth-fixed terrestrial reference system and geodetic datum. WGS 84 is based on a consistent set of constants and model parameters that describe the Earth's size, shape, and gravity and geomagnetic fields. WGS 84 is the standard U.S. Department of Defense definition of a global reference system for geospatial information and is the reference system for the Global Positioning System (GPS). It is compatible with the International Terrestrial Reference System (ITRS). Definition of Frame • Origin: Earth’s center of mass being defined for the whole Earth including oceans and atmosphere • Axes: o Z-Axis = The direction of the IERS Reference Pole (IRP). This direction corresponds to the direction of the BIH Conventional Terrestrial Pole (CTP) (epoch 1984.0) with an uncertainty of 0.005″ o X-Axis = Intersection of the IERS Reference Meridian (IRM) and the plane passing through the origin and normal to the Z-axis. The IRM is coincident with the BIH Zero Meridian (epoch 1984.0) with an uncertainty of 0.005″ o Y-Axis = Completes a right-handed, Earth-Centered Earth-Fixed (ECEF) orthogonal coordinate system • Scale: Its scale is that of the local Earth frame, in the meaning of a relativistic theory of gravitation. Aligns with ITRS • Orientation: Given by the Bureau International de l’Heure (BIH) orientation of 1984.0 • Time Evolution: Its time evolution in orientation will create no residual global rotation with regards to the crust Coordinate System: Cartesian Coordinates (X, Y, Z). -

Introduction to Georeferencing
Introduction to Georeferencing Turning paper maps to interactive layers DMDS Workshop Jay Brodeur 2019-02-29 Today’s Outline ➢ Basic fundamentals of GIS and geospatial data ⚬ Vectors vs. rasters ⚬ Coordinate reference systems ➢ Introduction to Quantum GIS (QGIS) ➢ Hands-on Problem-Solving Assignments Quantum GIS (QGIS) ➢ Free and open-source GIS software ➢ User-friendly, fully-functional; relatively lightweight ➢ Product of the Open Source Geospatial Foundation (OSGeo) ➢ Built in C++; uses python for scripting and plugins ➢ Version 1.0 released in 2009 ➢ Current version: 3.16; Long-term release (LTR): 3.14 GDAL - Geospatial Data Abstraction Library www.gdal.org SAGA - System for Automated Geoscientific Analyses saga-gis.org/ GRASS - Geographic Resources Analysis Support System www.grass.osgeo.org QGIS - Quantum GIS qgis.org GeoTools www.geotools.org Helpful QGIS Tutorials and Resources ➢ QGIS Tutorials: http://www.qgistutorials.com/en/ ➢ QGIS Quicktips with Klas Karlsson: https://www.youtube.com/channel/UCxs7cfMwzgGZhtUuwhny4-Q ➢ QGIS Training Guide: https://docs.qgis.org/2.8/en/docs/training_manual/ Geospatial Data Fundamentals Representing real-world geographic information in a computer Task 1: Compare vector and raster data layers Objective: Download some openly-available raster and vector data. Explore the differences. Topics Covered: ➢ The QGIS Interface ➢ Geospatial data ➢ Layer styling ➢ Vectors vs rasters Online version of notes: https://goo.gl/H5vqNs Task 1.1: Downloading vector raster data & adding it to your map 1. Navigate a browser to Scholars Geoportal: http://geo.scholarsportal.info/ 2. Search for ‘index’ using the ‘Historical Maps’ category 3. Load the 1:25,000 topo map index 4. Use the interactive index to download the 1972 map sheet of Hamilton 5. -

Terms for Coordinates Azimuth Angle Measured from North Clockwise
Terms for Coordinates Azimuth Angle measured from north clockwise. North is 0 degrees, east is 90 degrees etc. Three common forms of azimuth exist: true azimuth, magnetic azimuth, and grid azimuth. Angular Coordinates Latitude, Longitude, and Height can specify a location. This is called an angular frame. To obtain angular coordinates in a spherical earth system, only the radius is needed. This is needed only for the height. For an ellipsoidal earth the parameters of the ellipsoid must be specified to convert height and latitude. (To obtain geographic, or mean sea level, height the geoid is needed. Cartesian Coordinates Standard x-y-z coordinates. Three axes perpendicular to each other meet at the origin, or center of the coordinate system. The coordinates of a point are the projection of the location on these axes. Circle, Great A great circle is a circle on the earth whose center is the center of the earth. Alternately, it is the intersection of a plane and a sphere when the center of the sphere is on the plane. Shortest distance between two points on the earth in spherical model is a great circle. Meridians are great circles. Circle, Small A small circle is a circle on the earth whose center is not the center of the earth. Alternately, it is the intersection of a plane and a sphere when the center of the sphere is not on the plane. Parallels of latitude are small circles. Coordinate Frame In general this refers to a Cartesian system of coordinates. The location of the origin and the orientation of the axes with respect to the real earth are also included. -
Georeferencing
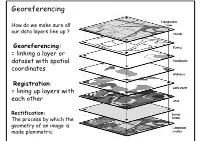
Georeferencing How do we make sure all our data layers line up ? Georeferencing: = linking a layer or dataset with spatial coordinates Registration: = lining up layers with each other Rectification: The process by which the geometry of an image is made planimetric Georeferencing • ‘To georeference’ the act of assigning locations to atoms of information • Is essential in GIS, since all information must be linked to the Earth’s surface • The method of georeferencing must be: – Unique, linking information to exactly one location – Shared, so different users understand the meaning of a georeference – Persistent through time, so today’s georeferences are still meaningful tomorrow Georeferencing Based on Data Types • Raster and Raster • Vector and Vector • Raster and Vector Geocoding Concepts and Definitions Definition of Geocoding • Geocoding can be broadly defined as the assignment of a code to a geographic location. Usually however, Geocoding refers to a more specific assignment of geographic coordinates (latitude,Longitude) to an individual address.. UN Report Definition of Geocoding • What is Geocoding • Geocoding is a process of creating map features from addresses, place names, or similar textual information based on attributes associated with a referenced geographic database, typically a street network that has address ranges associated with each street segment or 'link' running from one intersection to the next. Definition of Geocoding • What is Geocoding • Geocoding typically uses Interpolation as a method to find the location information about an address. – (If the address along one side of a block range from 1 to 199, then Street Number = 66 is about one-third of the way along that side of the block.) • Data required: – Reasonably clean, consistent list of legal addresses (i.e.