Characterization and Analysis of BAS Torque Capabilities
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mode and Implementation of a Hybrid Control System for a 2-Mode Hybrid Electric Vehicle Zhenhua Zhu West Virginia University
Graduate Theses, Dissertations, and Problem Reports 2013 Mode and implementation of a hybrid control system for a 2-mode hybrid electric vehicle zhenhua Zhu West Virginia University Follow this and additional works at: https://researchrepository.wvu.edu/etd Part of the Electro-Mechanical Systems Commons, and the Navigation, Guidance, Control, and Dynamics Commons Recommended Citation Zhu, zhenhua, "Mode and implementation of a hybrid control system for a 2-mode hybrid electric vehicle" (2013). Graduate Theses, Dissertations, and Problem Reports. 8162. https://researchrepository.wvu.edu/etd/8162 This Dissertation is protected by copyright and/or related rights. It has been brought to you by the The Research Repository @ WVU with permission from the rights-holder(s). You are free to use this Dissertation in any way that is permitted by the copyright and related rights legislation that applies to your use. For other uses you must obtain permission from the rights-holder(s) directly, unless additional rights are indicated by a Creative Commons license in the record and/ or on the work itself. This Dissertation has been accepted for inclusion in WVU Graduate Theses, Dissertations, and Problem Reports collection by an authorized administrator of The Research Repository @ WVU. For more information, please contact [email protected]. MODE AND IMPLEMENTATION OF A HYBRID CONTROL SYSTEM FOR A 2-MODE HYBRID ELECTRIC VEHICLE Zhenhua Zhu Dissertation submitted To the Benjamin M. Statler College of Engineering and Mineral Resources at West Virginia University in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Department of Mechanical Engineering Scott Wayne, Ph.D., Chair Nigel Clark, Ph.D. -
07 GRP03 All Engines 07 GRP03 All Transmissions 07 GRP04 All
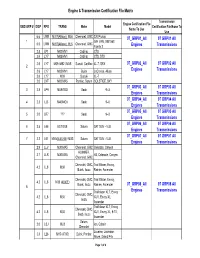
Engine & Transmission Certification File Matrix Transmission Engine Certification File OBD GRP # DISP RPO TRANS Make Model Certification File Name To Name To Use Use 6.6 LMM MW7(Allison), ML6 Chevrolet, GMC C/K Pickup 07_GRP01_All 07 GRP01 All 1 G/H VAN, GMT560 6.6 LMM MW7(Allison), ML6 Chevrolet, GMC Family 2 Engines Transmissions 2.8 LP1 M82/MV1 Cadillac CTS 3.6 LY7 M82/MV1 Cadillac CTS, STS 3.6 LY7 M09 /M82 / MX5 Suzuki, Cadillac XL-7, SRX 07_GRP02_All 07 GRP02 All 2 3.6 LY7 M82/MV1 Buick LaCrosse, Allure Engines Transmissions 3.6 LY7 M09 Suzuki XL-7 2.0 LNF M82/MA5 Pontiac, Saturn SOLSTICE, SKY 07_GRP03_All 07 GRP03 All 3 2.8 LP9 MU9/TBD Saab 9--3 Engines Transmissions 07_GRP04_All 07 GRP04 All 4 2.3 LJ3 M45/MC6 Saab 9--5 Engines Transmissions 07_GRP05_All 07 GRP05 All 5 2.0 LR7 ??? Saab 9--3 Engines Transmissions 07_GRP06_All 07 GRP06 All 6 3.5 L66 MJ7/MJ8 Saturn SAT SUV - VUE Engines Transmissions 07_GRP07_All 07 GRP07 All 7 2.2 L61 MN5(5L40/45)/ MG3 Saturn SAT SUV - VUE Engines Transmissions 2.9 LLV M30/MA5 Chevrolet, GMC Colorado, Canyon HUMMER, 3.7 LLR M30/MA5 H3, Colorado, Canyon Chevrolet, GMC Chevrolet, GMC, Trail Blazer, Envoy, 4.2 LL8 M30 Buick, Isuzu Rainier, Ascender Chevrolet, GMC, Trail Blazer, Envoy, 4.2 LL8 M30 (4L60E) Buick, Isuzu Rainier, Ascender 07_GRP08_All 07 GRP08 All 8 Trailblazer XLT, Envoy Engines Transmissions Chevrolet, GMC, 4.2 LL8 M30 XUV, Envoy XL, Isuzu Ascender Trailblazer XLT, Envoy Chevrolet, GMC, 4.2 LL8 M30 XUV, Envoy XL, 9-7X, Saab, Isuzu Ascender Saturn, 2.0 LSJ MU3 Ion, Cobalt Chevrolet Lucerne, -

Report: Review of the Technology Costs and Effectiveness Utilized In
Review of the Technology Costs and Effectiveness Utilized in the Proposed SAFE Rule Final Report Prepared for: California Dept. of Justice Sacramento, CA Prepared by: H-D Systems Washington, DC October 2018 i Biography of Report Author – K. Gopal Duleep Mr. Duleep is President of H-D Systems, a Washington based consulting firm specializing in automotive technology, emissions and fuels. He has been involved with automotive fuel economy issues for over thirty years, for clients in the public and private sector. He has extensive experience with issues surrounding automotive technology cost analysis and is an internationally known expert on automobile fuel economy technology. Mr. Duleep has directed several studies for public and private sector clients in the US, Canada, European Union (EU), Australia and Mexico evaluating new technologies for vehicular engine and fuel combinations (including methanol, natural gas and other alternative fueled vehicles) as well as high octane fuels in the US and the EU. These studies have compared technical feasibility, economics, performance, maintenance, and air emissions impacts. In 2007, Mr. Duleep served as the lead witness on automotive technology issues for the states of California and Vermont in their defense of the California greenhouse gas emission standards for light vehicles. The court ruled in California’s favor and found Mr. Duleep’s analysis more credible than those of the plaintiffs in every single area of challenge. He has been a consultant to several National Academy of Sciences Committees in their study of light vehicle fuel economy potential to 2030 and beyond. His work on fuel economy and GHG reduction technology for light-duty vehicles has been cited extensively around the world, and he has testified on transportation technology issues for the U.S. -

Future US Trends in the Adoption of Light-Duty Automotive Technologies
Future US Trends in the Adoption of Light-Duty Automotive Technologies Integrated Final Report Prepared for: American Petroleum Institute Prepared by: H-D Systems Washington, DC September, 2013 i TABLE OF CONTENTS Page EXECUTIVE SUMMARY vii 1. INTRODUCTION 1.1 BACKGROUND 1 1.2 METHODOLOGY 2 1.3 ORGANIZATION OF THIS REPORT 3 2. US STANDARDS FOR FUEL ECONOMY AND GHG EMISSIONS 2.1 BACKGROUND 5 2.2 OVERVIEW OF GHG AND FUEL ECONOMY REGULATION 6 2.3 REGULATORY DESIGN AND STRINGENCY 7 2.4 OFF-CYCLE CREDITS 13 2.5 OTHER EMISSION CREDITS 14 2.6 ESTIMATED CO2 AND FUEL ECONOMY STANDARDS WITH CREDITS 15 2.7 EU STANDARDS OR CO2 EMISSIONS FROM LIGHT VEHICLES 18 3. ADVANCED ENGINE TECHNOLOGIES 3.1 INTRODUCTION 21 3.2 VARIABLE VALVE ACTUATION 21 3.3 TURBOCHAGING AND SUPERCHARGING 25 3.4 INCREASED COMPRESSION RATIO 32 3.5 ENGINE FRICTION REDUCTION 36 3.6 IMPROVED LUBRICANTS 38 3.7 ADVANCED LIGHT DUTY DIESELS 39 4. BODY AND ACCESSORY TECHNOLOGY 4.1 WEIGHT REDUCTION 43 4.2 ROLLING RESISTANCE REDUCTION 45 4.3 AERODYNAMIC DRAG REDUCTION 46 4.4 ACCESSORY IMPROVEMENTS 47 5. ADVANCED TRANSMISSIONS 5.1 INTRODUCTION 49 5.2 SIX TO TEN SPEED AUTOMATIC TRANSMISSIONS 49 ii 5.3 AUTOMATED MANUAL TRANSMISSIONS 51 5.4 CONTINUOUSLY VARIABLE TRANSMISSIONS 53 5.5 TRANSMISSION EFFICIENCY IMPROVEMENTS 54 6. VEHICLE ELECTRIFICATION 6.1 STOP-START SYSTEMS 56 6.2 BELT STARTER ALTERNATOR (BAS) HYBRIDS 58 6.3 CRANKSHAFT MOUNTED MOTOR HYBRIDS 60 6.4 DUAL MOTOR “FULL” HYBRIDS 63 6.5 BATTERY ADVANCEMENTS AND IMPLICATIONS FOR BEV/PHEV SALES 64 7. -
2008 Advanced Vehicle Technology Analysis and Evaluation Activities
annual progress report 2008V EHICLE T ECHNOLOGIES P ROGRAM ADVANCED VEHICLE TECHNOLOGY ANALYSIS AND EVALUATION ACTIVITIES AND HEAVY VEHICLE SYSTEMS OPTIMIZATION PROGRAM A Strong Energy Portfolio for a Strong America Energy efficiency and clean, renewable energy will mean a stronger economy, a cleaner environment, and greater energy independence for America. Working with a wide array of state, community, industry, and university partners, the U.S. Department of Energy’s Office of Energy Efficiency and Renewable Energy invests in a diverse portfolio of energy technologies. For more information contact: EERE Information Center 1-877-EERE-INF (1-877-337-3463) www.eere.energy.gov U.S. Department of Energy Vehicle Technologies Program 1000 Independence Avenue, S.W. Washington, DC 20585-0121 FY 2008 Annual Progress Report for Advanced Vehicle Technology Analysis and Evaluation Activities and Heavy Vehicle Systems Optimization Program Submitted to: U.S. Department of Energy Energy Efficiency and Renewable Energy Vehicle Technologies Program Advanced Vehicle Technology Analysis and Evaluation Lee Slezak, Technology Manager FY 2008 Annual Report AVTAE Activities & HVSO Program ii AVTAE Activities & HVSO Program FY 2008 Annual Report CONTENTS I. INTRODUCTION.................................................................................................................................1 II. MODELING AND SIMULATION....................................................................................................9 A. PSAT Model Validation ...............................................................................................................9 -

Development and Implementation of Control System for an Advanced Multi-Regime Series-Parallel Plug-In Hybrid Electric Vehicle
Development and Implementation of Control System for an Advanced Multi-Regime Series-Parallel Plug-in Hybrid Electric Vehicle by Daniel Prescott B.Eng, University of Victoria, 2009 A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Applied Science in the Department of Mechanical Engineering Daniel Prescott, 2015 University of Victoria All rights reserved. This thesis may not be reproduced in whole or in part, by photocopy or other means, without the permission of the author. ii Supervisory Committee Development and Implementation of Control System for an Advanced Multi-Regime Series-Parallel Plug-in Hybrid Electric Vehicle by Daniel Prescott B.Eng, University of Victoria, 2009 Supervisory Committee Dr. Zuomin Dong, (Department of Mechanical Engineering) Supervisor Dr. Curran Crawford, (Department of Mechanical Engineering) Departmental Member Dr. Brad Buckham, (Department of Mechanical Engineering) Departmental Member iii Supervisory Committee Dr. Zuomin Dong, (Department of Mechanical Engineering) Supervisor Dr. Curran Crawford, (Department of Mechanical Engineering) Departmental Member Dr. Brad Buckham, (Department of Mechanical Engineering) Departmental Member Abstract Following the Model-Based-Design (MBD) development process used presently by the automotive industry, the control systems for a new Series- Parallel Multiple-Regime Plug-in Hybrid Electric Vehicle (PHEV), UVic EcoCAR2, have been developed, implemented and tested. Concurrent simulation platforms were used to achieve different developmental goals, with a simplified system power loss model serving as the low-overhead control strategy optimization platform, and a high fidelity Software-in-Loop (SIL) model serving as the vehicle control development and testing platform. These two platforms were used to develop a strategy-independent controls development tool which will allow deployment of new strategies for the vehicle irrespective of energy management strategy particulars. -
2008 Engine & Transmission Diagnostic Parameter File Matrix
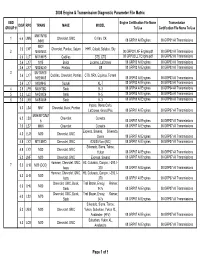
2008 Engine & Transmission Diagnostic Parameter File Matrix OBD Engine Certification File Name Transmission DISP RPO TRANS MAKE MODEL GROUP # To Use Certification File Name To Use MW7/MYB 1 6.6 LMM Chevrolet, GMC G Van, CK /MN8 08 GRP01 All Engines 08 GRP01 All Transmissions M82/ 2.0 LNF Chevrolet, Pontiac, Saturn HHR, Cobalt, Solstice, Sky 2 MA5/MU3 08 GRP02 LNF Engine.pdf 08 GRP02 All Transmissions 3.6 LLT MV1/MYB Cadillac STS, CTS 08 GRP02 LLT Engine.pdf 08 GRP02 All Transmissions 3.6 LY7 M15 Buick Lucerne, LaCrosse 08 GRP03 All Engines 08 GRP03 All Transmissions 3.6 LY7 M82/6L50 Pontiac G8 08 GRP03 All Engines 08 GRP03 All Transmissions 3 MV1/MYB/ 3.6 LY7 Cadillac, Chevrolet, Pontiac CTS, SRX, Equinox, Torrent M82/MX5 08 GRP03 All Engines 08 GRP03 All Transmissions 3.6 LY7 M09/M45 Suzuki XL-7 08 GRP03 All Engines 08 GRP03 All Transmissions 4 2.8 LP9 MU9/TBD Saab 9--3 08 GRP04 All Engines 08 GRP04 All Transmissions 5 2.3 LJ3 M45/MC6 Saab 9--5 08 GRP05 All Engines 08 GRP05 All Transmissions 6 2.0 LK9 M45/MU9 Saab 9--3 08 GRP06 All Engines 08 GRP06 All Transmissions Impala, Monte Carlo, 5.3 LS4 MN7 Chevrolet, Buick, Pontiac LaCrosse, Grand Prix 08 GRP07 All Engines 08 GRP07 All Transmissions MM6/MYC/MZ 6.2 LS3 Chevrolet Corvette 6 08 GRP07 All Engines 08 GRP07 All Transmissions 7.0 LS7 MM6 Chevrolet Corvette 08 GRP07 All Engines 08 GRP07 All Transmissions Express, Savana, Silverado, 4.3 LU3 M30 Chevrolet, GMC Sierra 08 GRP07 All Engines 08 GRP07 All Transmissions 4.8 LY2 MT1/MYD Chevrolet, GMC G20/30 Van (INC) 08 GRP07 All Engines 08 -
PHEV Final Report
Cornell University College of Engineering Engineering Management Plug-In Hybrid Vehicles Critical Analysis and Los Angeles Regional Feasibility Study Cornell University College of Engineering Civil and Environmental Engineering CEE 5910: Engineering Management Project Professor Francis M. Vanek Plug-In Hybrid Vehicles Critical Analysis and Los Angeles Regional Feasibility Study December 2010 Auret Basson, Mert Berberoglu, Whitney Bi Vincent DeRosa, Sara Lachapelle, Christina Lu Torio Risianto, Torsten Steinbach, Adam Stevens Alice Yu and Naji Zogaib Page | 2 Executive Summary This report is the product of a team project conducted at Cornell University for the Master of Engineering degree in Engineering Management. The project goal was to study the potential transition of light duty passenger vehicles to the Plug-In Hybrid Electric Vehicle (PHEV) concept, using the Los Angeles basin as the feasibility focus region. The analysis and findings should prove useful to governments, consumers, utilities, vehicle manufacturers, and other stakeholders. PHEVs incorporate both an electric motor and an internal combustion engine, with a battery pack that can be recharged externally. This vehicle concept has been gaining attention due to its potential ability to reduce petroleum consumption and carbon emissions, especially when combined with sustainable, low-carbon electricity generation. A mass transition toward PHEVs has been seen as one possible measure for addressing concerns related to climate change, global peak oil, dependence on foreign oil, urban smog, and air pollution. The team began by conducting a literature review in order to gain background information on the PHEV. The scope of the literature review was limited to the existing PHEV technology in Europe, Asia and North America; the PHEV battery with a focus on the Lithium-ion battery; electrical infrastructure including charging stations, smart grid systems, and renewable energy; and finally a section summarizing government, consumer and other points of view regarding PHEVs. -

Hybrid Electric Vehicle
4th Year Power Dep. Report On ͞hybrid electric car͟ Name Sec B.N. Ahmed Mahmoud Mohamed 1 36 Kareem Ahmed Said 5 15 Mahmoud Mohamed Hossiny 7 36 Supervised By Prof. Mohamed Abou Al Magd Table of contents 1- The Idea 2- How Hybrid Cars Work ? 3- Some of the advanced technologies typically used by hybrids include : A-Regenerative Braking B-Electric Motor Drive/Assist C-Automatic Start/Shutoff 4- Electric Batteries And Car Engines 5- History 6- Predecessors of current technology 7- Modern hybrids 8- Latest developments 9- Sales and rankings 10- Technology 11- Engines and fuel sources y Fossil fuels y Gasoline y Diesel y Liquefied petroleum gas y Hydrogen y Biofuels 12- Electric machines 13- Design considerations 14- Conversion kits 15- Fuel consumption 16- Noise 17- Pollution 18- Hybrid Premium and Showroom Cost Parity 19- Raw materials shortage 20- References An electric car is powered by an electric motor instead of a gasoline engine. The electric motor gets energy from a controller, which regulates the amount of power³based on the driver·s use of an accelerator pedal. The electric car (also known as electric vehicle or EV) uses energy stored in its rechargeable batteries, which are recharged by common household electricity. A hybrid electric vehicle (HEV) is a type of hybrid vehicle and electric vehicle which combines a conventional internal combustion engine (ICE) propulsion system with an electric propulsion system. The presence of the electric powertrain is intended to achieve either better fuel economy than a conventional vehicle, or better performance. A variety of types of HEV exist, and the degree to which they function as EVs varies as well. -

Vehicle Plant Modeling and Simulation to Optimize Mild Hybrid 48V BAS (Belt- Driven Alternator Starter) System Controller Algorithm Design
저작자표시-비영리-변경금지 2.0 대한민국 이용자는 아래의 조건을 따르는 경우에 한하여 자유롭게 l 이 저작물을 복제, 배포, 전송, 전시, 공연 및 방송할 수 있습니다. 다음과 같은 조건을 따라야 합니다: 저작자표시. 귀하는 원저작자를 표시하여야 합니다. 비영리. 귀하는 이 저작물을 영리 목적으로 이용할 수 없습니다. 변경금지. 귀하는 이 저작물을 개작, 변형 또는 가공할 수 없습니다. l 귀하는, 이 저작물의 재이용이나 배포의 경우, 이 저작물에 적용된 이용허락조건 을 명확하게 나타내어야 합니다. l 저작권자로부터 별도의 허가를 받으면 이러한 조건들은 적용되지 않습니다. 저작권법에 따른 이용자의 권리는 위의 내용에 의하여 영향을 받지 않습니다. 이것은 이용허락규약(Legal Code)을 이해하기 쉽게 요약한 것입니다. Disclaimer 공학전문석사학위연구보고서 Vehicle Plant Modeling and Simulation to Optimize Mild Hybrid 48V BAS (Belt- driven Alternator Starter) System Controller Algorithm Design 마일드 하이브리드 48V 바스 상위 제어기 최적 설계를 위한 차량 플랜트 모델링과 시뮬레이션 2018 년 02 월 서울대학교 공학전문대학원 응용공학과 이 헌 수 Vehicle Plant Modeling and Simulation to Optimize Mild Hybrid 48V BAS (Belt- driven Alternator Starter) System Controller Algorithm Design 마일드 하이브리드 48V 바스 상위 제어기 최적 설계를 위한 차량 플랜트 모델링과 시뮬레이션 지도교수 차 석 원 이 리포트를 공학전문석사학위 연구보고서로 제출함 2017 년 11월 서울대학교 공학전문대학원 응용공학과 이 헌 수 이헌수의 공학석사 학위논문을 인준함 2017 년 12월 위 원 장 : (인) 위 원 : (인) 위 원 : (인) Abstract Vehicle Plant Modeling and Simulation to Optimize Mild Hybrid 48V BAS (Belt-driven Alternator Starter) System Controller Algorithm Design Hunsoo Lee Graduate school of Engineering Practice Seoul National University It has already been 20 years since Toyota introduced a hybrid vehicle call “Prius”. Many Hybrid vehicles have been produced since then, but even so many years have passed.7 There is still a long way to the popularization of the hybrid vehicle. -

Hybrid Vehicles Technology Development and Cost Reduction
TECHNICAL BRIEF NO. 1 | JULY 2015 A SERIES ON TECHNOLOGY TRENDS IN PASSENGER VEHICLES IN THE UNITED StatES www.THEICCT.ORG ©2015 INTERNatIONAL COUNCIL ON CLEAN TRANSPORtatION Hybrid Vehicles TECHNOLOGY DEVELOPMENT AND COST REDUCTION JOHN GERMAN SUMMARY This briefing paper is a technical summary for policy simultaneously reducing costs, increasing vehicle size, makers of the status of hybrid vehicle development in engine power, and electric motor power, and multiplying the United States. consumer features. The purple line in figure 1 illustrates reductions in Prius hybrid system cost based upon Both sales of hybrid vehicles and the number of hybrid changes in the motor propulsion system and the Prius models have risen steadily in the U.S. since their list price versus the price of a comparably equipped introduction, with that growth trend accelerating sharply Corolla, without considering efficiency improvements. starting in 2003. The forty-five hybrid models available in Costs fell almost 5% per year from 2000 to 2010, 2014 captured about 2.75% of the overall U.S. passenger right in line with the rate of reduction from 2010 to vehicle market, down slightly from 3.19% in 2013. For 2013 (green line) as determined by the consultancy purposes of comparison, hybrid market share is about 6% FEV. If Toyota continues to achieve the same rate of of vehicles sold in California and about 20% in Japan. improvement in succeeding Prius generations, or if At their present state of development, full-function newer types of hybrid systems that are in much earlier hybrids reduce fuel consumption by 25 to 30 percent, stages of engineering development can replicate that at a manufacturing cost increment of roughly $2,500 rate of improvement, full-function hybrid system costs to $3,500. -
Rq13-003 Gm 9-9-2013 Attachment 1 Q7a Q7b Page
RQ13-003 GM 9-9-2013 ATTACHMENT 1 Q7A Q7B PAGE 79 Q8 PAGE 160 Q 11 PAGE 186 RQ13-003 GM 9-9-2013 ATTACHMENT 1 Q 07 A File in Section: 00 - General Information Bulletin No.: 10-00-89-017Z Service Bulletin Date: March, 2013 INFORMATION Subject: Car and Truck Fix it Right the First Time Issues Models: 2013 and Prior GM Passenger Cars and Trucks This bulletin is being revised to include updated information. Please discard Corporate Bulletin Number 10-00-89-017Y (Section 00 – General Information). In order to access this bulletin electronically, go to the SI Home Page and select the "Newest Bulletins" icon. The documents are arranged by sub-section and then by date (newest to oldest). Scroll down to "General Information" then click on the latest "Fix it Right the First Time" bulletin. Field Product Reminder – Car Issues – Fix it Right the First Time Model Do This Reference Year(s) Vehicle Line(s) / Condition Don't Do This Information/Bulletin 2013 All Lines — Multi-Media There is a new software Replace radio if the tool PI0911 Interface Tester (MIT) update available for the is not updated per the Software Update for InTouch MIT which will allow the latest S/W. Radio end user to additionally test the InTouch Radios. 2013 Spark, Sonic — MyLink An updated software Replace the radio. PI0914A Radio – XM Inoperable, calibration has been Service Camera Message released to address On, No Bluetooth Function, these conditions. Software Enhancement Reprogram the radio Update – GMNA Only following the 2 part steps. Part 1 (SPS Programming) Reprogram the radio using the Service Programming System (SPS) with the latest calibrations available on TIS2WEB.