Real-Time Traffic Incident Detection Using a Probabilistic Topic Model
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

This Press Release Is Not an Offer to Sell Or a Solicitation of Any Offer to Buy the Securities of Kenedix Realty Investment
Translation of Japanese Original July 5, 2011 To All Concerned Parties REIT Issuer: Kenedix Realty Investment Corporation 2-2-9 Shimbashi, Minato-ku, Tokyo Taisuke Miyajima, Executive Director (Securities Code: 8972) Asset Management Company: Kenedix REIT Management, Inc. Taisuke Miyajima, CEO and President Inquiries: Masahiko Tajima Director / General Manager, Financial Planning Division TEL.: +81-3-3519-3491 Notice Concerning Acquisitions of Properties (Conclusion of Agreements) (Total of 4 Office Buildings) Kenedix Realty Investment Corporation (“the Investment Corporation”) announced its decision on July 5, 2011 to conclude agreements to acquire 4 office buildings. Details are provided as follows. 1. Outline of the Acquisition (1) Type of Acquisition : Trust beneficiary interests in real estate (total of 4 office buildings) (2) Property Name and : Details are provided in the chart below. Planned Acquisition Price Anticipated Acquisition Price Property No. Property Name (In millions of yen) A-71 Kyodo Building (Iidabashi) 4,670 A-72 P’s Higashi-Shinagawa Building 4,590 A-73 Nihonbashi Dai-2 Building 2,710 A-74 Kyodo Building (Shin-Nihonbashi) 2,300 Total of 4 Office Buildings 14,270 *Excluding acquisition costs, property tax, city-planning tax, and consumption tax, etc. Each aforementioned building shall hereafter be referred to as “the Property” or collectively, “the Four Properties.” (3) Seller : Please refer to Item 4. “Seller’s Profile” for details. The following (4) through (9) applies for each of the Four Properties. This press release is not an offer to sell or a solicitation of any offer to buy the securities of Kenedix Realty Investment Corporation in the United States or elsewhere. -

18Th Fiscal Period Results Invincible Investment Corporation
18th Fiscal Period Results (from Jan. 1, 2012 to Jun. 30, 2012) Invincible Investment Corporation (Aug. 28, 2012) http://www.invincible-inv.co.jp/eng/ 1 Table of Contents Section 1: Section 3: Highlights of Performance Overview of Operations (P.15) for the 18th Fiscal Period (()P.3) - Financial Highlights for the 18th Fiscal Period - Portfolio / Financial History - Historical Operating Results - Portfolio MAP - Financial Metrics - Portfolio Diversification - Forecast for the 19th Fiscal Period - Overview of Residential Properties - Historical Occupancy Rates - Overview of Borrowings - Overview of Borrowing Mortgages - Overview of Unitholders - Historical Unit Price Section 2: Section 4: Financial Statements Activities to Improve for the 18th Fiscal Period (P.9) the Asset Value and the Profitability (P.29) - Income Statement - Internal Growth Strategies - Balance Sheet - Cash Flow Statement / Financial Statements pertaining to Distribution of Monies ■Disclaimer (Appendix) - Performance by Properties in the 18th Fiscal Period - Appraisal Values & Book Values at the end of the 18th Fiscal Period - Portfolio List 2 Section 1 Highlights of Performance for the 18th Fiscal Period 3 Financial Highlights for the 18th Fiscal Period (1) Total JPY 131 mn of repayment was made by scheduled repayments in twice on each of Balance as of Dec. 31, 2011 Syndicate Loan A Balance as of Jun. 30, 2012 Borrowing (Note1) and Shinsei Trust Loan B JPY 31,734 million JPY 31,603 million As of Dec. 31, 2011 LTV based on -0.1% As of Jun. 30, 2012 Unitholders’ 49. 5% 49. 4% Capital(Note 2) (LTV based on Appraisal Value (Note 3): 54.5%) (LTV based on Appraisal Value (Note 3): 53.5%) +0.1% As of Dec. -
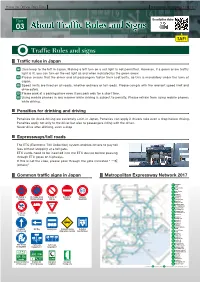
Traffic Rules and Signs
How to Drive Trip Tips DRIVING AROUND TOKYO Tips Description video 03 TAP!TAP! Traffic Rules and signs Traffic rules in Japan 1 Cars keep to the left in Japan. Making a left turn on a red light is not permitted. However, if a green arrow traffic light is lit, you can turn on the red light as and when indicated by the green arrow. 2 Please ensure that the driver and all passengers fasten their seat belts, as this is mandatory under the laws of Japan. 3 Speed limits are fixed on all roads, whether ordinary or toll roads. Please comply with the relevant speed limit and drive safely. 4 Please park at a parking place even if you park only for a short time. 5 Using mobile phones in any manner while driving is subject to penalty. Please refrain from using mobile phones while driving. Penalties for drinking and driving Penalties for drunk driving are extremely strict in Japan. Penalties can apply if drivers take even a drop before driving. Penalties apply not only to the driver but also to passengers riding with the driver. Never drive after drinking, even a drop. Expressways/toll roads The ETC (Electronic Toll Collection) system enables drivers to pay toll fees without stopping at a toll gate. ETC cards need to be inserted into the ETC device before passing through ETC gates on highways. If this is not the case, please pass through the gate indicated " 一般 (others)" ダミー Common traffic signs in Japan Metropolitan Expressway Network 2017 Kawaguchi Route Saitama Omiya Route Inner Circular Route Route No.1 Haneda Line No Parking or No Parking during -

22Nd Fiscal Period Results (January 1, 2014 to June 30, 2014)
22nd Fiscal Period Results (January 1, 2014 to June 30, 2014) August 28, 2014 Invincible Investment Corporation Investment Invincible Corporation TSE Code: 8963 http://www.invincible‐inv.co.jp/eng/ Table of Contents Page Title Page Title 2 Table of Contents 26 APPENDIX 3 Financial Highlights ‐ 22nd Fiscal Period (1H/2014) 27 • Income Statement 4 Global Offering of Investment Units (Implemented on July 17, 2014) 28 • Balance Sheet 5 • Reduced Funding Costs & Strengthened Bank Formation • Cash Flow Statement 30 6 • Media Coverage / Financial Statements pertaining to Dist r ib ut ion of Monies 7 • 22nd Fiscal Period & 23rd Fiscal Period Results/Forecast/Normalized 31 • Forecast for 23rd Fiscal Period (as of Aug. 27, 2014) 8 • Track Record of Value Creation • 22nd Fiscal Period Results 32 9 • Historical Unit Price ‐ comparison with 21st Fiscal Period results 10 Overview & Performance of Ne wly Acquired 20 Hote ls 33 • 22nd Fiscal Period Results ‐ comparison with initial forecast 11 • Overview of Ne wly Acquired 20 Hote ls • 23rd Fiscal Period Forecast 34 12 • Performance of 20 Limited Service Hotels & Revenue Upside Potential ‐ comparison with 22nd Fiscal Period results 13 • Fundamentals Driving De mand for Hote l Sector 35 • Financial Metrics 14 • External Growth Opportunities from Sponsor • Overview of Borrowings 36 15 • Revision of the Investment Guide line s (as of the end of Jun. 30, 2014 / Jul. 31, 2014) 16 Overview of Fortress Group 37 • Overview of Borrowing Mortgages 17 • Fortress Group’s Commitment to the Japanese Market 39 • Portfolio Characteristics 18 • Fortress Group’s Global Presence 40 • Overview of Unitholders 20 22nd Fiscal Period Operation Highlights (1H/2014) 41 • Newly Acquired 20 Hotels 21 • Portfolio Occupancy • Portfolio List as of the end of Jun. -

19Th Fiscal Period Results Invincible Investment Corporation
19th Fiscal Period Results (from Jul. 1, 2012 to Dec. 31, 2012) Invincible Investment Corporation (Feb. 28, 2013) http://www.invincible-inv.co.jp/eng/ 1 Table of Contents Sponsor Support and Activities Appendix (P. 2 5 ) from Year 2011 to Year 2012 (P.3) - History and Background Section 1 Highlights of Performance (P.26) - Activities during the 19th fiscal period ended Dec. 2012 - Financial Metrics - Highlights of the 19th fiscal period Results - Comparison between Forecast and Results for the 19th fiscal period /Forecast for the 20th fiscal period - Difference between the Initial Forecast (as of Aug. 27, 2012) - Ensuring the Stability of Distribution Amount in the mid -term and Results for the 19th fiscal period - Simulation of Changes in the Amount of Distribution by - Difference between Forecast (as of Dec. 20, 2012) and Results Refinancing for the 19th fiscal period - Forecast for the 20th fiscal period (as of Feb. 27, 2013) - Difference between Results for the 19th fiscal period Operational Results for the 19th Fiscal Period (P. 9) and Forecast for the 20th fiscal period - Conduit Requirements and Distributions - Distributions for the 19th fiscal period and the 20th fiscal period - Acquisition Details and Results Section 2 Financial Statements for the 19th Fiscal Period (P.35) - Overview of Borrowings (as of the end of Dec. 2012) - Income Statement - Overview of Borrowings (as of the end of Dec. 2012 / - Difference between results for the 18th fiscal period Feb. 28, 2013) and the 19th fiscal period - Overview of Borrowing Mortgages -

20Th Fiscal Period Results (January 1, 2013 to June 30, 2013) Invincible Investment Corporation
20th Fiscal Period Results (January 1, 2013 to June 30, 2013) Invincible Investment Corporation Investment Invincible Corporation TSE CdCode: 8963 http://www.invincible‐inv.co.jp/eng/ 1 Table of Contents Page Title Page Title 3 Achievements through 19th Fiscal Period (Dec. 2012) 19 APPENDIX 4 Financial Highlights ‐ 20th Fiscal Period (Jun. 2013) 20 ・Income Statement 5 20th Fiscal Period Results (Jun. 2013) 21 ・Balance Sheet ‐ Assets 6 ・ 20th Fiscal Period Results ‐ comparison with 19th Fiscal Period 22 ・Balance Sheet ‐ Liabilities / Net Assets 7 ・ 20th Fiscal Period Results ‐ comparison with initial forecast 23 ・Cash Flow Statement/ Financial Statements pertaining to Distribution of Monies 8 20th Fiscal Period Operation Highlights (Jun. 2013) 24 ・Financial Metrics 9 ・ Improvement of Portfolio Occupany 25 ・Forecast for 21st Fiscal Period (as of Aug. 28, 2013) 10 ・ 100% Occupancy achieved at 5 Tohoku Properties 26 ・Portfolio Characteristics 11 ・ Strengthening competitiveness: Cross Square NAKANO renovations 27 ・Overview of Borrowings (as of the end of Jun. 2013 / Aug. 29, 2013) 12 ・ High quality senior living facilities operated by industry leader 28 ・Overview of Borrowing Mortgages (as of the end of Jun. 2013) 13 ・ Asset Value Growth 29 ・Portfolio List as of the end of Jun. 2013 (Performance by Properties, etc.) 14 ・ Improvement of Net Operating Income 40 ・Appraisal Values & Book Values as of the end of Jun. 2013 15 ・ Interest‐Bearing Debt Overview (Jun. 2013) 43 ・Introduction of New Executive Team 16 ・ 21st Fiscal Period Forecast ‐ comparison with 20th Fiscal Period results 44 Disclaimer 17 ・ Overview of Unitholders 18 ・ Historical Unit Price Investment Invincible Corporation 2 Achievements through 19th Fiscal Period (Dec. -

21St Fiscal Period Results (July 1, 2013 to December 31, 2013) Invincible Investment Corporation
21st Fiscal Period Results (July 1, 2013 to December 31, 2013) February 27, 2014 Invincible Investment Corporation Investment Invincible Corporation TSE Code: 8963 http://www.invincible‐inv.co.jp/eng/ Table of Contents Page Title Page Title 2 Table of Contents 22 APPENDIX 3 Financial Highlights ‐ 21st Fiscal Period (2H/2013) 23 • Income Statement 4 Measures to Achieve Further Growth 24 • Balance Sheet ‐ Assets 5 • Refinancing & Capital Increase via Third‐Party Allotment 25 • Balance Sheet ‐ Liabilities / Net Assets 6 • New Bank Formation Led by Japanese Mega Banks 26 • Cash Flow Statement / Financial Statements pertaining to Dist r ib ut ion of Monies 7 • Bank Formation Strengthened 27 • Forecast for 22nd Fiscal Period (as of Feb. 26, 2014) 8 • New Unitholder Structure 28 • 21st Fiscal Period Results ‐ comparison with 20th Fiscal Period 9 Profitability, Dividend Trends, and Roadmap to Growth 29 • 21st Fiscal Period Results ‐ comparison with initial forecast 10 • Fortress Group’s Sponsorship and Effor t s to Increase EPS and DPU 30 • 22nd Fiscal Period Forecast ‐ comparison with 21st Fiscal Period results 11 • Invincibleʹs Roadmap for Future Growth 31 • Financial Metrics 12 21st Fiscal Period Operation Highlights (2H/2013) 32 • Overview of Borrowings (as of the end of Dec. 2013 / Jan. 31, 2014) 13 • Portfolio Occupancy 33 • Overview of Borrowing Mortgages (as of the end of Dec. 2013) 14 • Proactive Asset Management to Increase Rents 34 • Portfolio Characteristics 15 • Rent and Leasing Cost Trends 35 • Overview of Unitholders 16 • Growth of Portfolio Asset Values 36 • Hist or ical Unit Price 17 • 21st Fiscal Period Results and 22nd Fiscal Period Forecast 37 • Portfolio List as of the end of Dec. -

Effects of Traffic Sensor Location on Traffic State Estimation
Available online at www.sciencedirect.com Procedia - Social and Behavioral Sciences 54 ( 2012 ) 1186 – 1196 EWGT 2012 15th meeting of the EURO Working Group on Transportation Effects of Traffic Sensor Location on Traffic State Estimation Zihan Hong*, Daisuke Fukuda Department of Civil Enginering, Tokyo Institute of Technology, M1-11, 2-12-1, O-okayama, Meguro-ku, Tokyo 152-8552, Japan Abstract The necessity for high-density sensor installations and redundancy of sensor information in traffic state estimation is of concern to researchers and practitioners. The influence of different sensor locations on the accuracy of traffic state estimation using a velocity-based cell transmission model and state estimation with an Ensemble Kalman Filter was studied and tested on a segment of the Tokyo Metropolitan Highway during rush hours. It showed the estimated velocity changes significantly when the interval is extended from 200 m to about 400 m, but is acceptable at about 300 m. Sensor locations are critical when reducing sensor numbers. ©© 20122012 PublishedThe Authors. by Elsevier Published Ltd. by Selection Elsevier and/orLtd. Selection peer-review and/or under peer-review responsibility under of responsibility the Program Committee of the Program Committee. Keywords:Traffic State Estimation, Cell Transmission Model, Ensemble Kalman Filter, Tokyo Metropolitan Highway, Sensor Location 1. Introduction As traffic networks develop and traffic flows increase, the role of traffic sensors has become more important for controlling and mitigating congestion. Sensors are treated as monitoring devices that can detect traffic flow, velocity and density, and establish whether and when traffic congestion may occur or where accidents may happen. It is important to consider how to collect historical data of traffic information from these sensors to make them more useful for forecasting future traffic conditions. -

Metropolitan Expressway Network TUNNEL Shintoshin (S203) (S205) Saitama- Urawa-Kita Minuma (S554) S GAIKAN EXPRESSWAY JOBAN EXPRESSWAY 2 Misato (1) S5 Shintoshin
(S555) Yono TOHOKU EXPRESSWAY Kawaguchi JCT Shintoshin-nishi Saitama Shintoshin (S201)(S202) SHINTOSHIN Metropolitan Expressway Network TUNNEL Shintoshin (S203) (S205) Saitama- Urawa-kita minuma (S554) S GAIKAN EXPRESSWAY JOBAN EXPRESSWAY 2 Misato (1) S5 Shintoshin (S204) Exit to Oizumi to a Mis 外環 東北道 P-6 大泉 三郷 宇都宮 三 oda T GAIKAN Urawa- Ginza minami Araijuku (S11) Mis 出 郷 GAIKANa 口 外環 Misato 三郷 大泉 三郷 GAIKAN TOHOKU to Exit 大泉 (S551) 5 銀座 出口 Oizumi 外環 戸田 Oizumi Utsunomiya JCT M 松戸 Misato atsudo 常磐道 水 Bijogi JCT JOBAN 戸 Angyo (S09) Mito Misato (661) Yashio GAIKAN EXPRESSWAY (657) Shingo (S08)(S07) KAN-ETSU P-8 Ginza 外環 大宮 Toda Higashi-ikebukuro ROUTE EXPRESSWAY 大泉 三郷 5 (518) ROUTE CHUO Ginza YSHORE- A B YSHORE- A B B GAIKAN Omiya A 4 YSHORE-ROUTE 東池袋 C2 5 Oizumi Misato Adachi- (S06) (S04) 6 1 Misato-minami IC 6 中央道 湾岸線 銀座 湾岸線 湾岸線 C2 iriya 銀 C2 (S05) Higashi- ikebukuro 湾岸線 座 Toda- Kaga ryoke Higashi- C 1 CHUO B Nerima IC minami 6 Oizumi IC 9 Yashio- 4 C2 湾岸線 ROUTE (517) B 5 3 9 minami A YSHORE- S 5 B C2 東池袋 Mis 1 (655)(656) Hakozaki 中央道 Hamacho B a A 箱 to YSHORE-ROUTE 崎 KANNANA DORI An TOHOKU Mis JOBAN 東北道 g KEIYO ROAD KEIYO 三 東北道 安 TOHOKU (S01)(S02) 6 yo a 常磐道 三 湾岸線 Ginza 5 郷 to 行 9 Shikahama- (651)(652) 京葉道路 CHUO B 郷 1 S1 bashi (653)(654) 7 6 Kohoku JCT 4 C2 6 (515) (512)(511) B C2 yougoku JCT Ojikita Kahei A Mis ROUTE B C 湾岸線 6 YSHORE- C1 C2 1 9 R 銀 A Takashima 5 ROUTE Itabashi- B 9 YSHORE- (C34) Ginza ROUTE B B 中央道 C a P-1 座 6 C2 A 1 湾岸線 三 daira honcho to P-7 YSHORE- B 9 For 郷 Kiyosubashi 銀 湾岸線 l (C29) ASUKAYAMA (C35)(C36) (C37)(C38) -

Investor Presentation for the July 2017(20Th)Period~Appendix~
Investor Presentation for the July 2017 (20th) Period ~Appendix~ [Security Code] 3249 ~Appendix~Portfolio Data and Other Materials Our portfolio (As of end July 2017) (Reference) By Asset Category By Area Regional Share of Japanese GDP Other Areas Hokkaido / Tohoku Greater Nagoya Kyushu 9.1% 8.9% 11.6% Infrastructure Logistics Area Shikoku 2.7% 30.7% 53.5% 1.3% Chugoku 5.6% Greater Osaka Greater Asset Size Kinki Area Tokyo Area JPY286,807mn 24.6% 15.7% % 65.2 Kanto 39.9% Manufacturing and R&D Greater Tokyo 15.8% Area Chubu 65.2% 15.3% (Note) Based on appraisal price (Note) Based on appraisal price (Note) Cabinet Office, Japan, Annual Report on Prefectural Accounts for FY 2014 (released on May 26, 2017) (Note) Ministry of Land, Infrastructure, Transport and Tourism, Japan, "Recommendation Paper from the Council of Advisers for Revitalization of Metropolitan Expressways“ (Sep 2012) 1 ~Appendix~Portfolio Data and Other Materials Our portfolio (As of end Jul 2017) Greater Tokyo Area 34 properties Logistics: 19 properties, Manufacturing/R&D: 10 properties, Infrastructure: 5 properties L-1 IIF Shinonome L-4 IIF Noda L-5 IIF Shinsuna L-6 IIF Atsugi L-7 IIF Koshigaya L-9 IIF Narashino L-10 IIF Narashino L-11 IIF Atsugi L-12 IIF Yokohama L-13 IIF Saitama L-15 IIF Atsugi L-16 IIF Kawaguchi Logistics Logistics Logistics Logistics Logistics Logistics Center Logistics Center Logistics Tsuzuki Logistics Logistics Logistics Center Center Center Center Center (land with II Center II Logistics Center Center III Center (Note 1) leasehold interest) Center -

Networking People, Communities, and Daily Lives
2015 Networking People, Communities, and Daily Lives Greetings We at Metropolitan Expressway Company Limited (Shutoko) are involved day and night in the construction, upkeep and management of the Metropolitan Expressway, one of the metropolitan area’s major arterials. The Central Circular Route of the Metropolitan Expressway was fully opened on March 7, 2015, and currently a combined length of more than 310km is available, accommodating some 940,000 vehicles on average each day. Therefore to ensure continuous safety and satisfaction for all our customers, we make it our mission to always observe things from the driver’s perspective in order to offer a higher-quality service. Moreover, since about five times more heavy vehicles use our expressway network compared to local roads in the 23 wards of Tokyo, we have been engaged in thorough inspection and repair of our facilities. Moving forward, we will accurately carry out renewal and repair of aging facilities. – therefore, more than ever before, we are working on a diverse range of tasks, such as thoroughly inspecting and repairing facilities, embarking on large-scale renewals and overhauls of aging expressway sections as well as organizing the network, contending against traffic jams and implementing road safety measures to ensure safe, comfortable driving for all our customers. Shutoko pledges to continue uniting people, places and lifestyles in the metropolitan area to contribute to the creation of an affluent and comfortable society. To that end, we hope you will continue to understand -

Machinami Tsunagumidorimap
Shirahigebashi Nippori Sta. Shiinamachi Sta. Toshima Yanaka Higashi- 254 17 City Office Cemetery Mukōjima Higashi-ikebukuro Sta. Sendagi Sta. ning Honkomagome Sta. Sta.Co g Gree mfortin s in Towns Facilitie Nippon Bunkyo-ku Uguisudani Sta. Hongo-dori 6 Hakusan Sta. Medical School . Gokokuji Temple o 文 Tokyo Univ. N Iriya Kishibojin of the Arts e Machinami tsunagu MBunkyoAP t Facility name/Map no./Information/Address Temple Around Hibiya Park Midori Tokyo National u Gokokuji Sta. Sports Complex o Hikifune Mejiro Sta. Museum R Koishikawa Nezu Jinja Tokyo Metropolitan Sumida River a Sta. Botanical Garden 4 m Keisei- Zoshigaya Sta. Shrine Kototoi-dori Art Museum ji 19 Ochanomizu Univ. Sakura o Iino Building 文 Asakusa bashi k Hikifune Expressway 文 Ueno Zoological National Museum u 6 Otome-yama Park Ikebukuro Route No. 5 Gakushuin Univ. Gardens of Nature and Science Hanayashiki M To preserveSta. the biodiversity of y Nezu Sta. a Tokyo, “Iino Forest” creates a Myogadani Sta. Todai-mae Sta. w National Museum Kototoibashi s Shinobazu-dori s Seibu-Shinjuku Line of Western Art e rich natural environment that is Hakusan-dori Asakusa Sta. r Tokyo Shimo-Ochiai Sta. Hakusan-dori Yayoi Museum 16 p 文 x composed of native species, Ueno Park Showa-dori E Skytree Mejirodai Athletic Park plane trees Sensoji including cherry trees that are the Takushoku Univ. Ueno Royal Ueno Sta. Seseragi no Sato The Univ. Temple Sumida children of Garyu Sakura and Nakai Sta. Eisei Bunko Museum Marunouchi Line Museum Tobu Skytree Line of Tokyo Taito-ku Asakusa Sta. Park Shokawa Sakura. Ochiai Hotel 文 The Univ.