Meetings with Lambert W and Other Special Functions in Optimization and Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Black Holes with Lambert W Function Horizons
Black holes with Lambert W function horizons Moises Bravo Gaete,∗ Sebastian Gomezy and Mokhtar Hassainez ∗Facultad de Ciencias B´asicas,Universidad Cat´olicadel Maule, Casilla 617, Talca, Chile. y Facultad de Ingenier´ıa,Universidad Aut´onomade Chile, 5 poniente 1670, Talca, Chile. zInstituto de Matem´aticay F´ısica,Universidad de Talca, Casilla 747, Talca, Chile. September 17, 2021 Abstract We consider Einstein gravity with a negative cosmological constant endowed with distinct matter sources. The different models analyzed here share the following two properties: (i) they admit static symmetric solutions with planar base manifold characterized by their mass and some additional Noetherian charges, and (ii) the contribution of these latter in the metric has a slower falloff to zero than the mass term, and this slowness is of logarithmic order. Under these hypothesis, it is shown that, for suitable bounds between the mass and the additional Noetherian charges, the solutions can represent black holes with two horizons whose locations are given in term of the real branches of the Lambert W functions. We present various examples of such black hole solutions with electric, dyonic or axionic charges with AdS and Lifshitz asymptotics. As an illustrative example, we construct a purely AdS magnetic black hole in five dimensions with a matter source given by three different Maxwell invariants. 1 Introduction The AdS/CFT correspondence has been proved to be extremely useful for getting a better understanding of strongly coupled systems by studying classical gravity, and more specifically arXiv:1901.09612v1 [hep-th] 28 Jan 2019 black holes. In particular, the gauge/gravity duality can be a powerful tool for analyzing fi- nite temperature systems in presence of a background magnetic field. -

Universit`A Degli Studi Di Perugia the Lambert W Function on Matrices
Universita` degli Studi di Perugia Facolta` di Scienze Matematiche, Fisiche e Naturali Corso di Laurea Triennale in Informatica The Lambert W function on matrices Candidato Relatore MassimilianoFasi BrunoIannazzo Contents Preface iii 1 The Lambert W function 1 1.1 Definitions............................. 1 1.2 Branches.............................. 2 1.3 Seriesexpansions ......................... 10 1.3.1 Taylor series and the Lagrange Inversion Theorem. 10 1.3.2 Asymptoticexpansions. 13 2 Lambert W function for scalar values 15 2.1 Iterativeroot-findingmethods. 16 2.1.1 Newton’smethod. 17 2.1.2 Halley’smethod . 18 2.1.3 K¨onig’s family of iterative methods . 20 2.2 Computing W ........................... 22 2.2.1 Choiceoftheinitialvalue . 23 2.2.2 Iteration.......................... 26 3 Lambert W function for matrices 29 3.1 Iterativeroot-findingmethods. 29 3.1.1 Newton’smethod. 31 3.2 Computing W ........................... 34 3.2.1 Computing W (A)trougheigenvectors . 34 3.2.2 Computing W (A) trough an iterative method . 36 A Complex numbers 45 A.1 Definitionandrepresentations. 45 B Functions of matrices 47 B.1 Definitions............................. 47 i ii CONTENTS C Source code 51 C.1 mixW(<branch>, <argument>) ................. 51 C.2 blockW(<branch>, <argument>, <guess>) .......... 52 C.3 matW(<branch>, <argument>) ................. 53 Preface Main aim of the present work was learning something about a not- so-widely known special function, that we will formally call Lambert W function. This function has many useful applications, although its presence goes sometimes unrecognised, in mathematics and in physics as well, and we found some of them very curious and amusing. One of the strangest situation in which it comes out is in writing in a simpler form the function . -

The Strange Properties of the Infinite Power Tower Arxiv:1908.05559V1
The strange properties of the infinite power tower An \investigative math" approach for young students Luca Moroni∗ (August 2019) Nevertheless, the fact is that there is nothing as dreamy and poetic, nothing as radical, subversive, and psychedelic, as mathematics. Paul Lockhart { \A Mathematician's Lament" Abstract In this article we investigate some "unexpected" properties of the \Infinite Power Tower 1" function (or \Tetration with infinite height"): . .. xx y = f(x) = xx where the \tower" of exponentiations has an infinite height. Apart from following an initial personal curiosity, the material collected here is also intended as a potential guide for teachers of high-school/undergraduate students interested in planning an activity of \investigative mathematics in the classroom", where the knowledge is gained through the active, creative and cooperative use of diversified mathematical tools (and some ingenuity). The activity should possibly be carried on with a laboratorial style, with no preclusions on the paths chosen and undertaken by the students and with little or no information imparted from the teacher's desk. The teacher should then act just as a guide and a facilitator. The infinite power tower proves to be particularly well suited to this kind of learning activity, as the student will have to face a challenging function defined through a rather uncommon infinite recursive process. They'll then have to find the right strategies to get around the trickiness of this function and achieve some concrete results, without the help of pre-defined procedures. The mathematical requisites to follow this path are: functions, properties of exponentials and logarithms, sequences, limits and derivatives. -

Note on De Sitter Vacua from Perturbative and Non-Perturbative Dynamics in Type IIB/F-Theory Compactifications ∗ Vasileios Basiouris, George K
Physics Letters B 810 (2020) 135809 Contents lists available at ScienceDirect Physics Letters B www.elsevier.com/locate/physletb Note on de Sitter vacua from perturbative and non-perturbative dynamics in type IIB/F-theory compactifications ∗ Vasileios Basiouris, George K. Leontaris Physics Department, University of Ioannina, 45110, Ioannina, Greece a r t i c l e i n f o a b s t r a c t Article history: The properties of the effective scalar potential are studied in the framework of type IIB string theory, Received 1 August 2020 taking into account perturbative and non-perturbative corrections. The former modify the Kähler Received in revised form 21 September potential and include α and logarithmic corrections generated when intersecting D7branes are part of 2020 the internal geometric configuration. The latter add exponentially suppressed Kähler moduli dependent Accepted 23 September 2020 terms to the fluxed superpotential. The possibility of partial elimination of such terms which may Available online 1 October 2020 happen for particular choices of world volume fluxes is also taken into account. That being the case, Editor: A. Volovichis a simple set up of three Kähler moduli is considered in the large volume regime, where only one of them is assumed to induce non-perturbative corrections. It is found that the shape of the F-term potential crucially depends on the parametric space associated with the perturbative sector and the volume modulus. De Sitter vacua can be obtained by implementing one of the standard mechanisms, i.e., either relying on D-terms related to U (1) symmetries associated with the D7branes, or introducing D3 branes. -

On the Lambert W Function and Its Utility in Biochemical Kinetics
Biochemical Engineering Journal 63 (2012) 116–123 Contents lists available at SciVerse ScienceDirect Biochemical Engineering Journal j ournal homepage: www.elsevier.com/locate/bej Review On the Lambert W function and its utility in biochemical kinetics ∗ Marko Golicnikˇ Institute of Biochemistry, Faculty of Medicine, University of Ljubljana, Vrazov trg 2, 1000 Ljubljana, Slovenia a r t i c l e i n f o a b s t r a c t Article history: This article presents closed-form analytic solutions to three illustrative problems in biochemical kinetics Received 6 October 2011 that have usually been considered solvable only by various numerical methods. The problems solved Received in revised form concern two enzyme-catalyzed reaction systems that obey diversely modified Michaelis–Menten rate 20 December 2011 equations, and biomolecule surface binding that is limited by mass transport. These problems involve Accepted 21 January 2012 the solutions of transcendental equations that include products of variables and their logarithms. Such Available online 3 February 2012 equations are solvable by the use of the Lambert W(x) function. Thus, these standard kinetics examples are solved in terms of W(x) to show the applicability of this commonly unknown function to the biochemical Keywords: Biokinetics community. Hence, this review first of all describes the mathematical definition and properties of the W(x) Biosensors function and its numerical evaluations, together with analytical approximations, and then it describes the Enzymes use of the W(x) function in biochemical kinetics. Other applications of the function in various engineering Integrated rate equation sciences are also cited, although not described. -

On the Lambert W Function 329
On the Lambert W function 329 The text below is the same as that published in Advances in Computational Mathematics, Vol 5 (1996) 329 – 359, except for a minor correction after equation (1.1). The pagination matches the published version until the bibliography. On the Lambert W Function R. M. Corless1,G.H.Gonnet2,D.E.G.Hare3,D.J.Jeffrey1 andD.E.Knuth4 1Department of Applied Mathematics, University of Western Ontario, London, Canada, N6A 5B7 2Institut f¨ur Wissenschaftliches Rechnen, ETH Z¨urich, Switzerland 3Symbolic Computation Group, University of Waterloo, Waterloo, Canada, N2L 3G1 4Department of Computer Science, Stanford University, Stanford, California, USA 94305-2140 Abstract The Lambert W function is defined to be the multivalued inverse of the function w → wew. It has many applications in pure and applied mathematics, some of which are briefly described here. We present a new discussion of the complex branches of W ,an asymptotic expansion valid for all branches, an efficient numerical procedure for evaluating the function to arbitrary precision, and a method for the symbolic integration of expressions containing W . 1. Introduction In 1758, Lambert solved the trinomial equation x = q +xm by giving a series develop- ment for x in powers of q. Later, he extended the series to give powers of x as well [48,49]. In [28], Euler transformed Lambert’s equation into the more symmetrical form xα − xβ =(α − β)vxα+β (1.1) by substituting x−β for x and setting m = α/β and q =(α − β)v. Euler’s version of Lambert’s series solution was thus n 1 2 x =1+nv + 2 n(n + α + β)v + 1 n(n + α +2β)(n +2α + β)v3 6 (1.2) 1 4 + 24 n(n + α +3β)(n +2α +2β)(n +3α + β)v +etc. -

Lambert W-Function
Lambert W-Function Problem: W.eW = x, find W(x) - ? Solution: the Lambert W-Function Lambert W-Function Ref. : Lambert, J. H. "Observationes variae in Mathes in Puram." Acta Helvitica, physico-mathematico-anatomico- botanico-medica 3, 128-168, 1758. Euler, L. "De serie Lambertina plurimisque eius insignibus proprietatibus." Acta Acad. Scient. Petropol. 2, 29-51, 1783. Reprinted in Euler, L. Opera Omnia, Series Prima, Vol. 6: Commentationes Algebraicae. Leipzig, Germany: Teubner, pp. 350-369, 1921. Lambert W-Function The Lambert W -function, also called the omega function or the product log function , is the inverse function of discovered by: and Johann Lambert, Leonhard Euler, Zurich/Berlin, 1758 St.-Petersburg Academy Academy of Science, 1783 Lambert W-Function W(1) = 0.56714 is called the omega constant and can be considered a sort of "golden ratio" of exponents. The Lambert W -function has the series expansion! Lambert W-Function (x,y) Re: (x,y) Im: The real (left) and imaginary (right) parts of the analytic continuation of over the complex plane are illustrated above. Euler, L. "De serie Lambertina plurimisque eius insignibus proprietatibus." Acta Acad. Scient. Petropol. 2, 29-51, 1783. Reprinted in Euler, L. Opera Omnia, Series Prima, Vol. 6: Commentationes Algebraicae. Leipzig, Germany: Teubner, pp. 350-369, 1921. Lambert W-Function The General Problem : The General Solution : Lambert W-Function has numerous applications: 1) Banwell and Jayakumar (2000) showed that a W-function describes the relation between voltage, current and resistance in a diode 2) Packel and Yuen (2004) applied the W -function to a ballistic projectile in the presence of air resistance. -
![Arxiv:1209.0735V2 [Cs.MS] 7 Jan 2018 Running Time: the Tests Provided Take Only a Few Seconds to Run](https://docslib.b-cdn.net/cover/8116/arxiv-1209-0735v2-cs-ms-7-jan-2018-running-time-the-tests-provided-take-only-a-few-seconds-to-run-2338116.webp)
Arxiv:1209.0735V2 [Cs.MS] 7 Jan 2018 Running Time: the Tests Provided Take Only a Few Seconds to Run
Lambert W Function for Applications in Physics Darko Vebericˇ a,b aLaboratory for Astroparticle Physics, University of Nova Gorica, Slovenia bDepartment of Theoretical Physics, J. Stefan Institute, Ljubljana, Slovenia Abstract The Lambert W(x) function and its possible applications in physics are presented. The actual numerical implementa- tion in C++ consists of Halley’s and Fritsch’s iterations with initial approximations based on branch-point expansion, asymptotic series, rational fits, and continued-logarithm recursion. Keywords: Lambert W function, computational physics, numerical methods and algorithms, C++ Program summary Program title: LambertW Catalogue identifier: AENC v1 0 Program summary URL: http://cpc.cs.qub.ac.uk/summaries/AENC v1 0.html Program obtainable from: CPC Program Library, Queen’s University, Belfast, N. Ireland Licensing provisions: GNU General Public License version 3 No. of lines in distributed program, including test data, etc.: 1335 No. of bytes in distributed program, including test data, etc.: 25 283 Distribution format: tar.gz Programming language: C++ (with suitable wrappers it can be called from C, Fortran etc.), the supplied command-line utility is suitable for other scripting languages like sh, csh, awk, perl etc. Computer: All systems with a C++ compiler. Operating system: All Unix flavors, Windows. It might work with others. RAM: Small memory footprint, less than 1 MB Classification: 1.1, 4.7, 11.3, 11.9. Nature of problem: Find fast and accurate numerical implementation for the Lambert W function. Solution method: Halley’s and Fritsch’s iterations with initial approximations based on branch-point expansion, asymptotic series, rational fits, and continued logarithm recursion. -
Having Fun with Lambert W(X) Function Arxiv:1003.1628V2
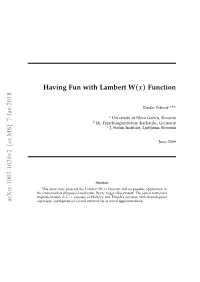
Having Fun with Lambert W(x) Function Darko Vebericˇ a,b,c a University of Nova Gorica, Slovenia b IK, Forschungszentrum Karlsruhe, Germany c J. Stefan Institute, Ljubljana, Slovenia June 2009 Abstract This short note presents the Lambert W(x) function and its possible application in the framework of physics related to the Pierre Auger Observatory. The actual numerical implementation in C++ consists of Halley’s and Fritsch’s iteration with branch-point arXiv:1003.1628v2 [cs.MS] 7 Jan 2018 expansion, asymptotic series and rational fits as initial approximations. 0 W0 -1 L x -2 W H -1 W -3 -4 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 x Figure 1: The two branches of the Lambert W function, W−1(x) in blue and W0(x) in red. The branching point at (−e−1, −1) is denoted with a green dash. 1 Introduction The Lambert W(x) function is defined as the inverse function of y exp y = x, (1) the solution being given by y = W(x), (2) or shortly W(x) exp W(x) = x. (3) Since the x 7! x exp x mapping is not injective, no unique inverse of the x exp x function exists. As can be seen in Fig.1, the Lambert function has two real branches with a branching −1 point located at (−e , −1). The bottom branch, W−1(x), is defined in the interval x 2 [−e−1, 0] and has a negative singularity for x ! 0−. The upper branch is defined for x 2 [−e−1, ¥]. -

The Two-Layer Hierarchical Distribution Model of Zeros of Riemann’S Zeta Function Along the Critical Line
information Article The Two-Layer Hierarchical Distribution Model of Zeros of Riemann’s Zeta Function along the Critical Line Michel Riguidel Department of Computer Science and Networks, Télécom ParisTech, 75015 Paris, France; [email protected]; Tel.: +33-67687-5199 Abstract: This article numerically analyzes the distribution of the zeros of Riemann’s zeta function along the critical line (CL). The zeros are distributed according to a hierarchical two-layered model, one deterministic, the other stochastic. Following a complex plane anamorphosis involving the Lambert function, the distribution of zeros along the transformed CL follows the realization of a stochastic process of regularly spaced independent Gaussian random variables, each linked to a zero. The value of the standard deviation allows the possible overlapping of adjacent realizations of the random variables, over a narrow confidence interval. The hierarchical model splits the z function into sequential equivalence classes, with the range of probability densities of realizations coinciding with the spectrum of behavioral styles of the classes. The model aims to express, on the CL, the coordinates of the alternating cancellations of the real and imaginary parts of the z function, to dissect the formula for the number of zeros below a threshold, to estimate the statistical laws of two consecutive zeros, of function maxima and moments. This also helps explain the absence of multiple roots. Keywords: Riemann’s zeta function; non-trivial zeros; Lambert’s function; Laplace–Gauss law; gaps; multiple roots Citation: Riguidel, M. The Two-Layer Hierarchical Distribution 1. Introduction Model of Zeros of Riemann’s Zeta This article presents a distribution model of the non-trivial zeros of the zeta function Function along the Critical Line. -

Computing the Lambert W Function
Computing the Lambert W function James F. Epperson November 16, 2013 The Lambert W function is one of the immense zoology of special functions in mathematics. Formally, it is defined implicitly as an inverse function: If w = W (x) is the Lambert W function, then we have w x = we (1) In the most general circumstances, W is a complex-valued function of a complex variable z. To keep things simple, we will look only at the real-variable case. Fundamentally, computing W is a root finding problem: Given x, we can find w = W (x) by finding the root (if one exists) of the function w F (w)= x we − (The notation here is a little different than we are used to: x is a fixed parameter, and w is the variable we are trying to find to make F zero.) We can learn quite a bit about the W function by plotting F , which can be done by specifying w and then computing x from (1). The MATLAB commands for this might be: w = [-400:200]*0.01; x = w.*exp(w); plot(x,w,’b-’) axis([-1 6 -4 2]) grid on The last command lays a grid of dotted lines over the plot. The results are given in Fig. 1 (next page). The problem is that we can’t easily compute W (x) for an arbitrary x using this scheme, which is what we need to do. We can deduce quite a bit about W (x) from this graph, although some analysis would need to be done to confirm our deductions: 1. -

Branch Differences and Lambert W
2014 16th International Symposium on Symbolic and Numeric Algorithms for Scientific Computing Branch differences and Lambert W D. J. Jeffrey and J. E. Jankowski Department of Applied Mathematics, The University of Western Ontario, London, Canada N6A 5B7 Email: [email protected] Abstract—The Lambert W function possesses In fact, this has already been noticed in a branches labelled by an index k. The value of W variety of contexts, with some instances pre- therefore depends upon the value of its argument dating the naming of the Lambert W function. z and the value of its branch index. Given two branches, labelled n and m, the branch difference For example, in [10], Jordan and Glasser, ap- is the difference between the two branches, when parently working independently, used a substi- x both are evaluated at the same argument z. tution equivalent to W (xe ) to evaluate the It is shown that elementary inverse functions definite integral have trivial branch differences, but Lambert W ∞ √ u has nontrivial differences. The inverse sine func- e−w/2 w u, w , d where = −u tion has real-valued branch differences for real 0 1 − e arguments, and the natural logarithm function has purely imaginary branch differences. The a problem posed by Logan, Mallows & Shepp. Lambert W function, however, has both real- Karamata [11] derived a series expansion for valued differences and complex-valued differ- W as part of his solution of a problem posed by ences. Applications and representations of the branch differences of W are given. Ramanujan. Definite integrals containing the tree T function, a cognate of W , used branch Keywords -complex analysis; special functions; differences in [3].