What Does Height Really Mean? Thomas H
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

It Is Quite Common for Confusion to Arise About the Process Used During a Hydrographic Survey When GPS-Derived Water Surface
It is quite common for confusion to arise about the process used during a hydrographic survey when GPS-derived water surface elevation is incorporated into the data as an RTK Tide correction. This article explains a little about the process. What we are discussing here might be a tide-related correction to a chart datum for coastal surveying – maybe to update navigational charts, or it might be nothing to do with tides at all. For example, surveying a river with the need to express bathymetry results as a bottom elevation on the desired vertical datum – not simply as “depth” results. Whether it is anything to do with tidal forces or not, the term “RTK Tide” is ubiquitous in hydrographic-speak to refer to vertical corrections of echo sounding data using RTK GPS. Although there is some confusing terminology, it’s a simple idea so let’s try to keep it that way. First keep in mind any GPS receiver will give the user basically two things in terms of vertical positioning: height above the GPS reference ellipsoid surface and height above Mean Sea Level (MSL) where ever he or she is on the Earth. How is MSL defined? Well, a geoid surface is a measure of the strength of gravity which in turn mostly controls the height of the sea; it is logical to say that MSL height equals the geoid height and vice versa. Using RTK techniques to obtain tide information is a logical extension of this basic principle. We are measuring the GPS receiver height above a geoid. -

Shaded Elevation Map of Ohio
STATE OF OHIO DEPARTMENT OF NATURAL RESOURCES DIVISION OF GEOLOGICAL SURVEY Ted Strickland, Governor Sean D. Logan, Director Lawrence H. Wickstrom, Chief SHADED ELEVATION MAP OF OHIO 0 10 20 30 40 miles 0 10 20 30 40 kilometers SCALE 1:2,000,000 427-500500-600600-700700-800800-900900-10001000-11001100-12001200-13001300-14001400-1500>1500 Land elevation in feet Lake Erie water depth in feet 0-6 7-12 13-18 19-24 25-30 31-36 37-42 43-48 49-54 55-60 61-66 67-84 SHADED ELEVATION MAP This map depicts the topographic relief of Ohio’s landscape using color lier impeded the southward-advancing glaciers, causing them to split into to represent elevation intervals. The colorized topography has been digi- two lobes, the Miami Lobe on the west and the Scioto Lobe on the east. tally shaded from the northwest slightly above the horizon to give the ap- Ridges of thick accumulations of glacial material, called moraines, drape pearance of a three-dimensional surface. The map is based on elevation around the outlier and are distinct features on the map. Some moraines in data from the U.S. Geological Survey’s National Elevation Dataset; the Ohio are more than 200 miles long. Two other glacial lobes, the Killbuck grid spacing for the data is 30 meters. Lake Erie water depths are derived and the Grand River Lobes, are present in the northern and northeastern from National Oceanic and Atmospheric Administration data. This digi- portions of the state. tally derived map shows details of Ohio’s topography unlike any map of 4 Eastern Continental Divide—A continental drainage divide extends the past. -

Meyers Height 1
University of Connecticut DigitalCommons@UConn Peer-reviewed Articles 12-1-2004 What Does Height Really Mean? Part I: Introduction Thomas H. Meyer University of Connecticut, [email protected] Daniel R. Roman National Geodetic Survey David B. Zilkoski National Geodetic Survey Follow this and additional works at: http://digitalcommons.uconn.edu/thmeyer_articles Recommended Citation Meyer, Thomas H.; Roman, Daniel R.; and Zilkoski, David B., "What Does Height Really Mean? Part I: Introduction" (2004). Peer- reviewed Articles. Paper 2. http://digitalcommons.uconn.edu/thmeyer_articles/2 This Article is brought to you for free and open access by DigitalCommons@UConn. It has been accepted for inclusion in Peer-reviewed Articles by an authorized administrator of DigitalCommons@UConn. For more information, please contact [email protected]. Land Information Science What does height really mean? Part I: Introduction Thomas H. Meyer, Daniel R. Roman, David B. Zilkoski ABSTRACT: This is the first paper in a four-part series considering the fundamental question, “what does the word height really mean?” National Geodetic Survey (NGS) is embarking on a height mod- ernization program in which, in the future, it will not be necessary for NGS to create new or maintain old orthometric height benchmarks. In their stead, NGS will publish measured ellipsoid heights and computed Helmert orthometric heights for survey markers. Consequently, practicing surveyors will soon be confronted with coping with these changes and the differences between these types of height. Indeed, although “height’” is a commonly used word, an exact definition of it can be difficult to find. These articles will explore the various meanings of height as used in surveying and geodesy and pres- ent a precise definition that is based on the physics of gravitational potential, along with current best practices for using survey-grade GPS equipment for height measurement. -
National Spatial Reference System: "Positioning Changes for 2022"
National Spatial Reference System “Positioning Changes for 2022” Civil GPS Service Interface Committee Meeting Miami, Florida September 24, 2018 Denis Riordan, PSM NOAA, National Geodetic Survey [email protected] U.S. Department of Commerce National Oceanic & Atmospheric Administration National Geodetic Survey Mission: To define, maintain & provide access to the National Spatial Reference System (NSRS) to meet our Nation’s economic, social & environmental needs National Spatial Reference System * Latitude * Scale * Longitude * Gravity * Height * Orientation & their variations in time U. S. Geometric Datums in 2022 National Spatial Reference System (NSRS) Improvements in the Horizontal Datums TIME NETWORK METHOD NETWORK SPAN ACCURACY OF REFERENCE NAD 27 1927-1986 10 meter (1 part in 100,000) TRAVERSE & TRIANGULATION - GROUND MARKS USED FOR NAD83(86) 1986-1990 1 meter REFERENCING (1 part THE in 100,000) NSRS. NAD83(199x)* 1990-2007 0.1 meter GPS B- orderBECOMES (1 part THE in MEANS 1 million) OF POSITIONING – STILL GRND MARKS. HARN A-order (1 part in 10 million) NAD83(2007) 2007 - 2011 0.01 meter 0.01 meter GPS – CORS STATIONS ARE MEANS (CORS) OF REFERENCE FOR THE NSRS. NAD83(2011) 2011 - 2022 0.01 meter 0.01 meter (CORS) NSRS Reference Basis Old Method - Ground Current Method - GNSS Stations Marks (Terrestrial) (CORS) Why Replace NAD83? • Datum based on best known information about the earth’s size and shape from the early 1980’s (45 years old), and the terrestrial survey data of the time. • NAD83 is NON-geocentric & hence inconsistent w/GNSS . • Necessary for agreement with future ubiquitous positioning of GNSS capability. Future Geometric (3-D) Reference Frame Blueprint for 2022: Part 1 – Geometric Datum • Replace NAD83 with new geometric reference frame – by 2022. -

B3 : Variation of Gravity with Latitude and Elevation
Geophysics 210 September 2008 B3 Variation of gravity with latitude and elevation By measuring the subtle changes in the acceleration of gravity from one place to another, it is possible to learn about changes in subsurface density. However, other factors can cause gravity to vary with position on the Earth. These effects must be removed from measurements in order to use gravity data to study the interior of the Earth. B3.1 Variation of gravity with latitude It is observed that at the Equator, g E = 978,033 mgal while at the poles g P = 983,219 mgal This difference is 5186 mgal, which is a lot larger than changes in gravity because of subsurface density. Can this observation be explained by the fact that the Earth is a rotating ellipsoid? (A)The Earth is distorted by rotation The Earth is an oblate spheroid. R E = 6378 km R P = 6357 km. Qualitative answer Since a point on the Equator is further from the centre of the Earth than the poles, gravity will be weaker at the Equator and g E < g P Quantitative answer GM E 24 For a sphere g (r) = where the mass of the Earth, ME = 5.957 10 kg. r 2 At the North Pole, RP = 6357 km and g P = 983,219 mgal. If we move up 21 km to the equator, the decrease in gravity will be 6467 mgal Thus g E = g P - 6467 mgal, which is too much to explain the observed difference between the Equator and the Poles. 1 Geophysics 210 September 2008 (B) - Centrifugal forces vary with latitude The rotation of the Earth also causes gravity to vary with latitude. -

Geographical Influences on Climate Teacher Guide
Geographical Influences on Climate Teacher Guide Lesson Overview: Students will compare the climatograms for different locations around the United States to observe patterns in temperature and precipitation. They will describe geographical features near those locations, and compare graphs to find patterns in the effect of mountains, oceans, elevation, latitude, etc. on temperature and precipitation. Then, students will research temperature and precipitation patterns at various locations around the world using the MY NASA DATA Live Access Server and other sources, and use the information to create their own climatogram. Expected time to complete lesson: One 45 minute period to compare given climatograms, one to two 45 minute periods to research another location and create their own climatogram. To lessen the time needed, you can provide students data rather than having them find it themselves (to focus on graphing and analysis), or give them the template to create a climatogram (to focus on the analysis and description), or give them the assignment for homework. See GPM Geographical Influences on Climate – Climatogram Template and Data for these options. Learning Objectives: - Students will brainstorm geographic features, consider how they might affect temperature and precipitation, and discuss the difference between weather and climate. - Students will examine data about a location and calculate averages to compare with other locations to determine the effect of geographic features on temperature and precipitation. - Students will research the climate patterns of a location and create a climatogram and description of what factors affect the climate at that location. National Standards: ESS2.D: Weather and climate are influenced by interactions involving sunlight, the ocean, the atmosphere, ice, landforms, and living things. -

A Seamless Vertical-Reference Surface for Acquisition, Management and Display (Ecdis) of Hydrographic Data
SEAMLESS VERTICAL DATUM A SEAMLESS VERTICAL-REFERENCE SURFACE FOR ACQUISITION, MANAGEMENT AND DISPLAY (ECDIS) OF HYDROGRAPHIC DATA A report prepared for the Canadian Hydrographic Service under Contract Number IIHS4-122 David Wells Alfred Kleusberg Petr Vanicek Department of Geodesy and Geomatics Engineering University of New Brunswick PO. Box 4400 Fredericton, New Brunswick Canada E3B 5A3 FINAL REPORT (DRAFT) November 22, 2004 Page 1 SEAMLESS VERTICAL DATUM Final Report 15 July 1995 FINAL REPORT (DRAFT) November 22, 2004 Page 2 SEAMLESS VERTICAL DATUM TABLE OF CONTENTS Table of contents...........................................................................................................................2 Executive summary.......................................................................................................................5 Acronyms used in this report ........................................................................................................6 1. Introduction...............................................................................................................................8 1.1 Problem statement.......................................................................................................8 1.2 The role of vertical-reference surfaces in navigation..................................................8 1.3 Vertical-reference surface accuracy issues..................................................................9 1.3.1 Depth measurement errors .........................................................................10 -

Accuracy of Flight Altitude Measured with Low-Cost GNSS, Radar and Barometer Sensors: Implications for Airborne Radiometric Surveys
sensors Article Accuracy of Flight Altitude Measured with Low-Cost GNSS, Radar and Barometer Sensors: Implications for Airborne Radiometric Surveys Matteo Albéri 1,2,* ID , Marica Baldoncini 1,2, Carlo Bottardi 1,2 ID , Enrico Chiarelli 3, Giovanni Fiorentini 1,2, Kassandra Giulia Cristina Raptis 3, Eugenio Realini 4, Mirko Reguzzoni 5, Lorenzo Rossi 5, Daniele Sampietro 4, Virginia Strati 3 and Fabio Mantovani 1,2 ID 1 Department of Physics and Earth Sciences, University of Ferrara, Via Saragat, 1, 44122 Ferrara, Italy; [email protected] (M.B.); [email protected] (C.B.); fi[email protected] (G.F.); [email protected] (F.M.) 2 Ferrara Section of the National Institute of Nuclear Physics, Via Saragat, 1, 44122 Ferrara, Italy 3 Legnaro National Laboratory, National Institute of Nuclear Physics, Via dell’Università 2, 35020 Legnaro (Padova), Italy; [email protected] (E.C.); [email protected] (K.G.C.R.); [email protected] (V.S.) 4 Geomatics Research & Development (GReD) srl, Via Cavour 2, 22074 Lomazzo (Como), Italy; [email protected] (E.R.); [email protected] (D.S.) 5 Department of Civil and Environmental Engineering (DICA), Polytechnic of Milan, Piazza Leonardo da Vinci 32, 20133 Milano, Italy; [email protected] (M.R.); [email protected] (L.R.) * Correspondence: [email protected]; Tel.: +39-329-0715328 Received: 7 July 2017; Accepted: 13 August 2017; Published: 16 August 2017 Abstract: Flight height is a fundamental parameter for correcting the gamma signal produced by terrestrial radionuclides measured during airborne surveys. -
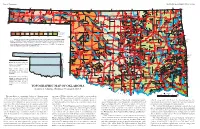
TOPOGRAPHIC MAP of OKLAHOMA Kenneth S
Page 2, Topographic EDUCATIONAL PUBLICATION 9: 2008 Contour lines (in feet) are generalized from U.S. Geological Survey topographic maps (scale, 1:250,000). Principal meridians and base lines (dotted black lines) are references for subdividing land into sections, townships, and ranges. Spot elevations ( feet) are given for select geographic features from detailed topographic maps (scale, 1:24,000). The geographic center of Oklahoma is just north of Oklahoma City. Dimensions of Oklahoma Distances: shown in miles (and kilometers), calculated by Myers and Vosburg (1964). Area: 69,919 square miles (181,090 square kilometers), or 44,748,000 acres (18,109,000 hectares). Geographic Center of Okla- homa: the point, just north of Oklahoma City, where you could “balance” the State, if it were completely flat (see topographic map). TOPOGRAPHIC MAP OF OKLAHOMA Kenneth S. Johnson, Oklahoma Geological Survey This map shows the topographic features of Oklahoma using tain ranges (Wichita, Arbuckle, and Ouachita) occur in southern contour lines, or lines of equal elevation above sea level. The high- Oklahoma, although mountainous and hilly areas exist in other parts est elevation (4,973 ft) in Oklahoma is on Black Mesa, in the north- of the State. The map on page 8 shows the geomorphic provinces The Ouachita (pronounced “Wa-she-tah”) Mountains in south- 2,568 ft, rising about 2,000 ft above the surrounding plains. The west corner of the Panhandle; the lowest elevation (287 ft) is where of Oklahoma and describes many of the geographic features men- eastern Oklahoma and western Arkansas is a curved belt of forested largest mountainous area in the region is the Sans Bois Mountains, Little River flows into Arkansas, near the southeast corner of the tioned below. -
Pilot's Operating Handbook and Faa
FEBRUARY 2006 VOLUME 33, NO. 2 The Official Membership Publication of The International Comanche Society The Comanche Flyer is the official monthly member publication of the Volume 33, No. 2 • February 2006 International Comanche Society www.comancheflyer.com 5604 Phillip J. Rhoads Avenue Hangar 3, Suite 4 Bethany, OK 73008 Published By the International Comanche Society, Inc. Tel: (405) 491-0321 Fax: (405) 491-0325 CONTENTS www.comancheflyer.com 2 Letter From The President Karl Hipp ICS President Karl Hipp Cover Story: Comanche Spirit Tel: (970) 963-3755 4 Mike and Pattie Adkins – Kim Blonigen E-mail: [email protected] Pilots, Partners and Owners of N4YA Managing Editor 6 2005-2006 ICS Board of Directors Kim Blonigen & Tribe Representatives E-mail: [email protected] 6 2005-2006 ICS Standing Advertising Manager Committees & Chairpersons John Shoemaker 6 ICS 2006 Nominating Committee 800-773-7798 Fax: (231) 946-9588 6 ICS Website Update E-mail: [email protected] Special Feature Graphic Design 8 Surviving Katrina Koren Herriman 9 Call for Nominees E-mail: [email protected] Pilot Pointers Printer Village Press 10 It Should Not Happen To You — Omri Talmon 2779 Aero Park Drive Comanche Accidents for Traverse City, MI 49685-0629 November 2005 and a Case www.villagepress.com Technically Speaking Office Manager 14 Online Intelligence — Gaynor Ekman Learning to Use the Garmin 430 and 530 Tel: (405) 491-0321 17 Technical Tidbits Michael Rohrer Fax: (405) 491-0325 E-mail: [email protected] 19 CFF-Approved CFIs The Comanche Flyer is available to members; From the Logbook the $25 annual subscription rate is included in the Society’s Annual Membership dues in 20 Transatlantic Adventures – Part Two Karl Hipp & US funds below. -

Datums in Texas NGS: Welcome to Geodesy
Datums in Texas NGS: Welcome to Geodesy Geodesy is the science of measuring and monitoring the size and shape of the Earth and the location of points on its surface. NOAA's National Geodetic Survey (NGS) is responsible for the development and maintenance of a national geodetic data system that is used for navigation, communication systems, and mapping and charting. ln this subject, you will find three sections devoted to learning about geodesy: an online tutorial, an educational roadmap to resources, and formal lesson plans. The Geodesy Tutorial is an overview of the history, essential elements, and modern methods of geodesy. The tutorial is content rich and easy to understand. lt is made up of 10 chapters or pages (plus a reference page) that can be read in sequence by clicking on the arrows at the top or bottom of each chapter page. The tutorial includes many illustrations and interactive graphics to visually enhance the text. The Roadmap to Resources complements the information in the tutorial. The roadmap directs you to specific geodetic data offered by NOS and NOAA. The Lesson Plans integrate information presented in the tutorial with data offerings from the roadmap. These lesson plans have been developed for students in grades 9-12 and focus on the importance of geodesy and its practical application, including what a datum is, how a datum of reference points may be used to describe a location, and how geodesy is used to measure movement in the Earth's crust from seismic activity. Members of a 1922 geodetic suruey expedition. Until recent advances in satellite technology, namely the creation of the Global Positioning Sysfem (GPS), geodetic surveying was an arduous fask besf suited to individuals with strong constitutions, and a sense of adventure. -

The Evolution of Earth Gravitational Models Used in Astrodynamics
JEROME R. VETTER THE EVOLUTION OF EARTH GRAVITATIONAL MODELS USED IN ASTRODYNAMICS Earth gravitational models derived from the earliest ground-based tracking systems used for Sputnik and the Transit Navy Navigation Satellite System have evolved to models that use data from the Joint United States-French Ocean Topography Experiment Satellite (Topex/Poseidon) and the Global Positioning System of satellites. This article summarizes the history of the tracking and instrumentation systems used, discusses the limitations and constraints of these systems, and reviews past and current techniques for estimating gravity and processing large batches of diverse data types. Current models continue to be improved; the latest model improvements and plans for future systems are discussed. Contemporary gravitational models used within the astrodynamics community are described, and their performance is compared numerically. The use of these models for solid Earth geophysics, space geophysics, oceanography, geology, and related Earth science disciplines becomes particularly attractive as the statistical confidence of the models improves and as the models are validated over certain spatial resolutions of the geodetic spectrum. INTRODUCTION Before the development of satellite technology, the Earth orbit. Of these, five were still orbiting the Earth techniques used to observe the Earth's gravitational field when the satellites of the Transit Navy Navigational Sat were restricted to terrestrial gravimetry. Measurements of ellite System (NNSS) were launched starting in 1960. The gravity were adequate only over sparse areas of the Sputniks were all launched into near-critical orbit incli world. Moreover, because gravity profiles over the nations of about 65°. (The critical inclination is defined oceans were inadequate, the gravity field could not be as that inclination, 1= 63 °26', where gravitational pertur meaningfully estimated.