Challenges in Predictive Analytics for Professional Racing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
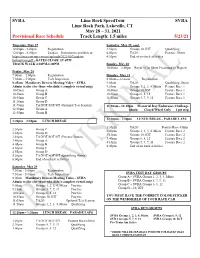
31, 2021 Provisional Race Schedule Track Length: 1.5 Miles 5/23/21
SVRA Lime Rock SpeedTour SVRA Lime Rock Park, Lakeville, CT May 28 – 31, 2021 Provisional Race Schedule Track Length: 1.5 miles 5/23/21 Thursday, May 27 Saturday, May 29, cont. 12:00pm - 6:00pm Registration 3:30pm Groups 10, IGT Qualifying 12:00pm - 6:00pm Load-in – Instructions available at: 4:00pm TA2® Practice 30min https://svra.com/wp-content/uploads/2021/05/Load-in- 4:30pm End of on-track activities Instructions.pdf - GATES CLOSE AT 6PM TRACK WALK 4:30PM-6:00PM Sunday, May 30 10:00am – 3:00pm Royal’s Car Show Presented by Hagerty Friday, May 28 7:00am – 5:00pm Registration Monday, May 31 7:30am – 5:00pm Tech Inspection 8:00am—12 noon Registration 8:45am Mandatory Drivers Meeting Video – SVRA 9:05am TA2® Qualifying 20min Admin trailer (for those who didn’t complete virtual mtg) 9:30am Groups 1, 2, 3, 4, Miata Feature Race 1 10:05am Group A 10:00am Groups 10, IGT Feature Race 1 10:30am Group B 10:30am Groups 6, 8, 12 Feature Race 1 10:55am Group C 11:00am Groups 5, 7, 9, 11 Feature Race 1 11:20am Group D 11:45am TA/XGT/SGT/GT (Optional Test Session) 11:30am - 12:30pm Memorial Day Endurance Challenge 12:30pm Group A 60min Closed Wheel Only 1 pit stop 12:55pm Group B 12:30pm - 1:30pm LUNCH BREAK - PARADE LAPS 1:20pm—2:20pm LUNCH BREAK 1:30pm TA2® Feature Race 65min 2:20pm Group C 2:40pm Groups 1, 2, 3, 4, Miata Feature Race 2 2:45pm Group D 3:10pm Groups 10, IGT Feature Race 2 3:10pm TA/XGT/SGT/GT (Practice 30min) 3:40pm Groups 6, 8, 12 Feature Race 2 3:40pm Group A 4:10pm Groups 5, 7, 9, 11 Feature Race 2 4:05pm Group B 4:40pm End of -

SVRA Supplemental Tire Regulations (Not for Gold Medallion Classes) Revised 5/2021
SVRA Supplemental Tire Regulations (Not for Gold Medallion Classes) Revised 5/2021 Wheel diameter must be as originally fitted unless permitted in Since tires are a consumable item, SVRA requires tires that are currently available and are (the Spec Sheets). of a reasonable age. There is no doubt that modern tire compounds and construction are vastly improved from what was available to competitors when our cars were originally Tires must be mounted following raced. the manufacturers specification for wheel width. The intent of these rules is to specify tires that are a reasonable compromise between the tires raced with during the period and what is currently available. Availability in sufficient Bodywork may not be modified sizes to maintain equitable tire performance within the Group and Class structure is of beyond period specifications to primary importance. We are looking for an appropriate level of dry grip for all the cars in a accommodate approved tires. group, to avoid overloading suspension components. Tires are evaluated by looking at their aspect ratio, tread pattern, carcass design and wear rating. Some tire sizes/brands are acceptable based on true tire diameter and cross- section regardless of the listed aspect ratio. Some tires listed have been discontinued. These “Legacy” tires remain on the list as long as the age of the existing stock /sizes remain safe for racing use. Group 1 - Molded Treaded Tires Approved Tires: Minimum aspect ratio of 60, except as listed on the right, tread depth— Avon Racing: 5.0/22-13, A29 14297 ACB9 only, A25 FF not permitted no less than 2/32” remaining, at all 6.0/22-13, A29 14298 ACB9 only, A25 FF not permitted times, over 75% of the tire. -
Official Entry Form for 2019 World 100
49th WORLD 100 ENTRY CHECKLIST SAVE $170 WHEN YOU FILE ONLINE BY FRIDAY, AUGUST 30th To assist us in making your 2019 World 100 as seamless as possible, we have put together this checklist of the necessary paperwork required prior to Technical Inspection. All pre-entry forms must be filed ONLINE by Friday, August 30th – saving you both money and time. Note that filing online by August 30th is now the third tiebreaker when total points are sorted. The online entry form uses “Smart Logic” to auto-populate all Eldora required forms necessary for the event. If you have already raced at Eldora this season, it will be even easier for you. See you soon! ⇒ Reviewed 2019 Eldora Specific Rules. ⇒ Completed Official Entry Form for 2019 World 100. ⇒ Submitted 2019 Eldora Driver & Owner Membership. ⇒ Submitted W-9 (or W-8BEN) to Eldora for 2019 season. ⇒ Submitted 2019 DIRTcar Membership (must be processed by World Racing Group prior to event for member benefits/insurance coverage). http://www.eldoraspeedway.com/world-100-entry OFFICIAL ENTRY FORM – ENTER ONLINE BY FRIDAY, AUGUST 30th TO SAVE $170! EVENT: “THE WORLD 100” (49TH ANNUAL) $437,800 POSTED AWARDS – $52,000-TO-WIN! DATE(S): Thursday, September 5th – Random Draw for Qualifying Order (split into Group A & B); Timed Hot Laps; Multi-Car Qualifying (Group A & Group B); Heat Races (inverted); B-Features (as necessary) and two $10,000-to-win 25-lap A-Features Friday, September 6th – Random Draw for new entrants (split into Group A or B); Timed Hot Laps; Multi-Car Qualifying (Group A & Group B); Heat Races (inverted); B-Features (as necessary) and two $10,000-to-win 25-lap A- Features Saturday, September 7th – Six Heat Races (lineups seeded by points earned on Preliminary Nights – inverted); two B-Features + Scrambles and the 49th “World 100” PROMOTER: Eldora Speedway, Inc. -

Official Rule Book Table768b of Contents
2016 VERIZON INDYCAR SERIES OFFICIAL RULE BOOK TABLE768B OF CONTENTS 631B GENERAL ................................................................ 7 GOVERNANCE .......................................................... 7 SAFETY ................................................................. 12 LOGO DISPLAY ....................................................... 21 ADVERTISING ......................................................... 21 TITLE SPONSOR ...................................................... 22 PRODUCT USE ........................................................ 24 MEMBERSHIP ........................................................ 31 GENERAL .............................................................. 31 APPLICATION ......................................................... 31 TERM ................................................................... 33 INTERIM REVIEW OF QUALIFICATIONS ......................... 33 ACKNOWLEDGEMENT OF RELEASE AND ASSUMPTION OF RISK ................................................................ 33 APPLICABLE LAWS AND JURISDICTION ......................... 33 CONDUCT IDENTIFICATION ........................................ 35 LITIGATION ............................................................ 35 CATEGORIES .......................................................... 35 AGE ................................................................... 36 MORAL FITNESS ................................................... 36 PHYSICAL AND PSYCHOLOGICAL FITNESS .................... 37 MEDICAL EXAMINATIONS -

Brave New World Embarking on a New Era of Excitement in the Fia World Rally Championship
INTERNATIONAL JOURNAL OF THE FIA: Q4 2016 ISSUE #17 THE BRAWN AGENDA 20 UNDER 20 As Formula One prepares for At the end of a fascinating year major technical change, famed in motor sport, experts from team boss Ross Brawn on why racing and rallying choose their the devil is in the detail P28 stars of the near future P58 SAFETY ON DISPLAY UNFLAPPABLE GURNEY Ahead of the launch of a major From racing to running race FIA road safety campaign, AUTO teams, from great car control to reveals the key visuals and the inspired car design, Dan Gurney stars behind the messages P34 was the complete competitor P68 P38 BRAVE NEW WORLD EMBARKING ON A NEW ERA OF EXCITEMENT IN THE FIA WORLD RALLY CHAMPIONSHIP ISSUE #17 THE FIA Dear reader, The Fédération Internationale de l’Automobile is the governing An enthralling year of motor sport has just come to body of world motor sport and an end, but already fans are looking forward to next the federation of the world’s leading motoring organisations. season when some disciplines will be embracing Founded in 1904, it brings significant changes. INTERNATIONAL together 236 national motoring JOURNAL OF THE FIA and sporting organisations from The World Rally Championship will have a new over 135 countries, representing look, with more powerful and exciting cars, and our Editorial Board: millions of motorists worldwide. In motor sport, it administers cover story examines its new rules and the challenges JEAN TODT, OLIVIER FISCH the rules and regulations for all they will bring. Despite the unexpected departure of GERARD SAILLANT, international four-wheel sport, SAUL BILLINGSLEY including the FIA Formula One Volkswagen, I am sure next season will provide a great Editor-in-chief: LUCA COLAJANNI World Championship and FIA spectacle and attract an even wider audience. -

Official Website of the Indy Racing League
Edmonton Indy INDYCAR PARTICIPANT SCHEDULE City Centre Raceway Week of July 16th - July 22th 2012 IZOD IndyCar® Series / Firestone Indy Lights® Final 7/2/12 MONDAY TUESDAY WEDNESDAY THURSDAY FRIDAY SATURDAY SUNDAY July 16 July 17 July 18 July 19 July 20 July 21 July 22 12:00-4:00 Credentials 7:00-4:30 Credentials 7:00-3:30 Credentials 6:00-12:45 Credentials 8:00-8:00 Garage Hours 7:00-7:00 Garage Hours 7:00-7:00 Garage Hours 6:00 Garage Open 10:30 Transporters 7:00-2:30 Firestone Indy Lights Tech 7:00-2:30 Firestone Indy Lights Tech assemble in the staging 8:00-3:00 IZOD IndyCar Series Tech 8:00-11:30 IZOD IndyCar Series Tech 7:00 IZOD IndyCar Series Tech area within the 8:15 - 8:45 NASCC Practice 8:00 - 8:45 Firestone Indy Lights Qual. Indy Paddock 9:00 - 9:30 Star Mazda Practice 9:00 - 10:00 8:00 - 8:30 9:45 Competition Team Mgr. Mtg. IZOD IndyCar Series Practice IZOD IndyCar Series Warm Up Transporters Start Arriving 11:15 Transporters 12:00-All Cars One Time Thru 10:30 PR Rep Mtg. 10:15 - 10:45 CTS Practice 8:30 Mass at Edmonton Indy Paddock Depart Staging Area Firestone Indy Lights Tech 9:45 - 10:30 10:15 - 10:45 Firestone Indy Lights 8:45 - 9:15 for Wed Parade 12:00 All Cars One Time Thru Firestone Indy Lights Practice Autograph Session 2 Seater / Event Car Rides 12:00 IZOD IndyCar Tech Open 10:50 - 11:20 Group A 11:00 - 11:30 Star Mazda Qualifying 9:00 Chapel Transporter Parade IZOD IndyCar Series Practice 11:45 - 12:00 9:30 - 10:15 Star Mazda Race #2 and Load In at the Track 11:20 - 11:50 Group B: All Cars Firestone Indy Lights Warm Up 12:00 - 12:30 12:15 - 12:45 CTS Practice 10:30 - 11:45 CTS Race 2:00 - 4:00 2 Seater / Event Car Rides 12:15-12:45 Star Autograph Session Track Walk 12:45 - 1:30 1:30 FIL Drivers Meeting 10:00-3:00 NBC Sports Network Firestone Indy Lights Practice 1:00 - 2:15 Est. -

Classes Racing Class Allocation
Classes Racing Class Allocation Within all classes every effort has been made to ensure that cars of similar performance are grouped together. As the manufacturers have gone to a lot of trouble making accurate miniatures the Club endeavours to allocate models to the Class/Series for which they were designed. An alternative body may be substituted providing it fits the class requirements and must be to scale i.e., no ‘handling’ or womp out of scale models permitted. However, all the interior fittings from the donor model must go into the replacement, no lightweight substitutes allowed. Within fair and reasonable tolerances, members are encouraged to attempt to model a 1:1 scale race-car that fits that particular class including period race livery. New release cars will not be eligible to race as they become available until the model's performance has been ascertained. Class allocation will be on the basis of performance. New release cars may not race at the same meeting at which they are classified. Racing Classes There are 18 racing classes divided into three groups of six and although we do not officially have workshopping in the calendar there is always time and opportunity to discuss R & D, tuning and just messing around on race nights. Group A Group B Group C Classic F1 G.P. Hero's V8/Utes Classic Le Mans Slot.it Group C Group 5 Thunder Cars Classic Sports Modern Le Mans Ninco Classic Tourers Classic Touring Cars Scalextric BTCC Classic Rally Group A Super Tourers Ford v. Ferrari Club Cars (LMP) Homebuilt Australian Tourers FJs Home Built Group A Classic F1 Open to Classic F1’s from 1964 to 1982. -

Vehicle Contract Catalog the 'Contract #' Is Hyperlinked to a PDF Showing Vehicle Pricing and Vehicle Specifications
State of Iowa, DOT, and Regents - 2021/22 Model Year Vehicle Contract Catalog The 'Contract #' is hyperlinked to a PDF showing vehicle pricing and vehicle specifications. The 'Dealer' name is hyperlinked to create an email to the dealers representative for the State of Iowa Contract. State of Iowa Executive Branch Agencies: All vehicle purchases must be made through the Department of Administrative Services, Central Procurement Fleet Services Enterprise, pursuant to Iowa Code Chapter 8A.362.4.a. ***State Vehicle Contract numbers can only be used to purchase vehicles through the Contracted Dealers below.*** Other governmental entities may use these contracts for purchasing vehicles. When the Final Bid Price includes additional options not included in the base vehicle specifications, those additional options may be removed from the Final Bid Price and other additional options may be added to the Final Bid Price to allow entities to build the vehicle to meet their needs. The base vehicle specifications shall not be revised. Law Enforcement - Police Vehicles (PPV series) - Pursuit Rated Contract/ Vehicle Vehicle Model Contract E85 Base Alt. Engine Group # Make Model Size Description Body Code Dealer Price Dept. Proposal # Specifications Year Expire Date Engine Available Group A 21119 Group A 1.1 2021 10/16/21 Dodge Charger Full Size Rear Wheel Drive, Four Door Police Pursuit Sedan with 5.7 L Hemi LDDE48 No No Stew Hansens $24,999.00 DAS 1.1 Group A 21119 Group A 1.2 2021 10/16/21 Dodge Charger Full Size All Wheel Drive, Four Door Police Pursuit -

Honda Indy™ 200 at Mid Ohio INDYCAR® PARTICIPANT SCHEDULE Lexington, OH - USA Week of Jul
Honda Indy™ 200 at Mid Ohio INDYCAR® PARTICIPANT SCHEDULE Lexington, OH - USA Week of Jul. 31 - Aug. 5, 2012 IndyCar® Series/ALMS/PWC/USF2000 FINAL 7/20/12 TUESDAY WEDNESDAY THURSDAY FRIDAY SATURDAY SUNDAY July 31 August 1 August 2 August 3 August 4 August 5 6:30 Safety Meeting (Maint Shop) 6:30 Safety Meeting (Maint. Shop) 6:30 Safety Meeting (Maint. Shop) 10:00 - 3:00 INDYCAR Credentials 7:00 - 5:00 INDYCAR Credentials 7:00 - 1:00 INDYCAR Credentials 7:00 - 1:00 INDYCAR Credentials 6:00 AM-7:00 PM Garage Hours 6:00 AM-5:00 PM Garage Hours 6:00 Garage Open 7:00-4:00 IZOD IndyCar Series Tech 7:00-9:00 IZOD IndyCar Series Tech 6:15 IZOD IndyCar Series Tech 7:55 - 8:00 Vitesse/Course Clearance Lap (5) 7:35 - 7:50 USF2000 Warm-up 10:00 PWC 8:00 - 8:30 USF2000 Practice (30) 8:00 - 9:00 (60) 7:50 - 8:05 Break (15) Load In 8:30 - 9:15 PWC Test Session (45) 8:30 - 8:40 Break (10) IZOD IndyCar Series Practice 8:05-8:35 (30) 9:15 - 9:30 Break (15) 8:40 - 8:45 Vitesse/Course Clearance Lap (5) 9:00 - 9:20 Break (15) IZOD IndyCar Series Warm Up 9:30 - 10:15 USF2000 Test Session(45) 8:45 - 9:45 ALMS Practice All Classes (60) 9:15 - 9:20 Vitesse/Course Clearance Lap (5) 8:35 - 8:50 Break (15) 10:15 - 10:30 Break (15) 9:45 - 9:50 Break (5) 9:20 - 9:50 ALMS Warm up (30) 8:50 - 9:40 (50) 12:00 10:30 - 11:00 PWC Media Rides (30) 9:50 - 9:55 Vitesse/Course Clearance Lap (5) 9:50 - 10:05 Vitesse/Course Clearance Lap (15) Alternate Two Seater & Event Car Rides INDYCAR 11:00 - 11:15 Break (15) 9:55 - 10:00 Break (5) 10:05 - 10:10 Break (5) 9:00 Mass & Manufacturers -

JUNE 2019 TIME TABLE 6 2019.6.1 ▶ 6.30 J SPORTS 4 ★ First on Air
JUNE 2019 TIME TABLE 6 2019.6.1 ▶ 6.30 J SPORTS 4 ★ First On Air Sat Sun Mon Tue Wed Thu Fri 1 2 3 4 5 6 7 6.00 Futsal F League 5.00 FIFA U-20 WORLD 6.30 Cycle* Warera World #2 6.30 World Rugby #22 6.30 J SPORTS HOOP! #6 6.00 Sanix World Rugby Youth 6.00 J SPORTS Selection Round1-3 CUP POLAND #28 7.00 FIFA U-20 WORLD 7.00 Super Rugby 7.00 Super Rugby Week16-2 Exchange Convention 「NAGOYA vs. SHONAN」 GROUP B CUP POLAND #37 Week16-3 「Sharks vs. Hurricanes」 7.30 World Rugby #22 「ITALY vs. JAPAN」 Round of 16 「Lions vs. Stormers」 9.00★WWE SMACK DOWN #1033 8.00 WWE SMACK DOWN #1033 8.00★MLB 7.15 IFSC Sports Climbing Navi 10.00 Super Rugby Week16-1 9.00★WWE Raw #1358 English Version English Version (06/06) 7.30 J SPORTS HOOP! #6 「Sunwolves vs. Brumbies」 English Version 10.00 Kessoku SAMURAI JAPAN #48 8.00★MLB 8.00★MLB 0.45 RWC Navi Higashi Osaka 0.15 RWC Navi 11.15 RWC Navi Higashi Osaka 10.30 IFSC Climbing World Cup (05/31) (06/01) 1.00★Marathon de Paris HL 0.30 Cycle* Warera World #2 11.30 FIFA U-20 WORLD Boulder Round 4 2.00 BOOMER #110 1.00 Documentary -The REAL- CUP POLAND #42 「WUJIANG - CHINA」 3.00 Cycle* Warera World #2 2.30 IFSC Climbing World Cup FIFA WOMEN'S WORLD CUP Round of 16 2.00 SUPER GT 2.30★Fuji Super Tec 24h 3.30 Documentary -The REAL- Boulder Round 1 2.00 Kessoku SAMURAI JAPAN #48 Round3 Suzuka Circuit Part1 START FIFA WOMEN'S WORLD CUP 「MEIRINGEN - SWITZERLAND」 2.30 IFSC Climbing World Cup 2.30 IFSC Climbing World Cup 「Final」 3.00 IFSC Climbing World Cup 4.30 WWE RAW #1356 6.00★WWE RAW #1357 Boulder Round 2 Boulder Round -

2019 TER H - Tour European Rally Historic Regulations
2019 TER H - Tour European Rally Historic Regulations Art. 1 - DEFINITION AND ORGANISATION 1.1 - In 2019, Tour European Rally Promoter with Sport Rally Team, organiser licence B n. 405239 issued by Italian ASN, ACI, will organise a series named 2019 Tour European Rally Historic (TER Historic). The series will be governed according to the International Sporting Code (ISC) and its Appendixes, the National Regulations of the Countries in which the Rallies are held, the individual Event Supplementary Regulations plus the present regulations. Art. 2 - EVENTS CALENDAR 2.1 - The events valid for the 2019 TER Historic are: - Rally Moritz Costa Brava - Spain - 15/16 March 2019 - Rallye Sanremo - Italy - 11/13 April 2019 - Rallye Antibes Cote d'Azur - France - 17/19 May 2019 - Conxion Omloop van Vlaanderen Rally - Belgium - 6/7 September 2019 - Rallye Rias Altas . Spain - 3/5 October 2019 - Rallye International du Valais - Switzerland - 17/19 October 2019 - COEFFICIENT 2 Art. 3 – ELIGIBLE COMPETITORS AND DRIVERS 3.1 – Holders of international licenses will be admitted to the 2019 TER Historic, in accordance with the 2019 Appendix L to the ISC. Art. 4 - ELIGIBLE VEHICLES Eligible vehicles must comply with Appendix K to the ISC and are those listed below. The cars are divided into the classes stated below . Road legal cars built between 1/1/1905 and 31/12/1957 and Touring and GT cars, models homologated between 1/1/1958 and 31/12/1969. A1 up to 1000cm3 (before 31/12/1961) A2 from 1001cm3 to 1600 cm3 (before 31/12/1961) A3 over 1600cm3 (before 31/12/1961) B1 up to 1000cm3 (after 31/12/1961) B2 from 1001cm3 to 1300cm3 (after 31/12/1961) B3 from 1301cm3 to 1600cm3 (after 31/12/1961) B4 from 1601cm3 to 2000cm3 (after 31/12/1961) B5 over 2000cm3 (after 31/12/1961) Touring (T), Competition Touring (CT), Grand Touring (GT) and Competition Grand Touring (GTS) cars of Groups 1, 2, 3 and 4, models homologated between 1/1/1970 and 31/12/1975. -

Official Race Card October 16-18, 2020
OCTOBER 16-18, 2020 OFFICIAL RACE CARD FOREWARD BY THE DUKE OF RICHMOND WELCOME TO SPEEDWEEK FOREWARD BY Welcome everyone to Goodwood SpeedWeek THE DUKE OF presented by Mastercard. Now, at last, we RICHMOND can fire up those engines and go racing, and so bring our motorsport season spectacularly back to life. Of course, I am very sad and disappointed that you cannot be at the circuit with us but, let me assure you, it’s going to be an utterly unique and memorable event and you won’t miss a minute of the action on all three days. Ironically, because we have to stage the event behind closed doors, we are able to create a spectacle that we would normally never dream of doing. As a live and interactive TV show, SpeedWeek will be brought to you in a way that has never been seen before in motorsport broadcasting. The live stream, and the ITV coverage, will be free to air and will take you right into the heart of the event with all the race action, interviews with the drivers and coverage of the new rally stages, the Shootout for the fastest lap of the circuit, and a sensational celebration of 70 years of Formula 1. SpeedWeek combines many of the best elements of the Members’ Meeting, the Festival of Speed and the Revival, plus some new and exciting content that will see the cars using parts of the circuit that are way beyond the track limits. The Shootout for fastest lap will see modern machinery on the circuit, something we’ve never been able to do before.