The Pulsating Indian Epicycle of the Sun
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Notes for Origins-Astro, J. Hedberg © 2018
PHY 454 - origins-astro - J. Hedberg - 2018 The Origins Of Astronomy and Astrophysics 1. Ancient Astronomy 2. A Spherical Earth 3. The Ptolemaic System 1. Ptolemy's Arrangement 4. Retrograde Motion 1. Epicycles 2. Equants 3. Ptolemaic System 5. Heliocentric 6. Geocentric vs. Heliocentric 7. Positions of Celestial Objects 1. The Altitude-Azimuth Coordinate System 2. The Equatorial Coordinate System 3. Basics of the earth's orbit 4. Celestial equator 8. Solar vs. Sidereal Time 1. Special Times of the year 2. Analemma 9. Equatorial System 10. Time 1. Julian Date 11. Summary 12. Bibliography and Further Reading Ancient Astronomy Fig. 1 A selection of ancient cosmologies. a) Ancient Egyptian Creation myth. The earth is the leaf adorned figure lying down. The sun and moon are riding the boats across the sky. b) Ancient Hebrew Conception of the universe c) Hindu: The earth was on elephants which were on turtles. (And of course a divine cobra) (public domain images) Since the earliest recorded histories, humanity has attempted to explain its position in the universe. Societies and cultures have described many varying pictures of the universe. Often, there would be some deity or certain animals involved that were responsible updated on 2018-08-29 Page 1 PHY 454 - origins-astro - J. Hedberg - 2018 for holding various parts aloft or keeping regions separate or moving things like the sun around the earth. Humans and their civilizations were almost aways located at the center of each universe.Generally there was some sorting to do - put the heavy stuff down there, the light stuff up there. -

A Study of Ancient Khmer Ephemerides
A study of ancient Khmer ephemerides François Vernotte∗ and Satyanad Kichenassamy** November 5, 2018 Abstract – We study ancient Khmer ephemerides described in 1910 by the French engineer Faraut, in order to determine whether they rely on observations carried out in Cambodia. These ephemerides were found to be of Indian origin and have been adapted for another longitude, most likely in Burma. A method for estimating the date and place where the ephemerides were developed or adapted is described and applied. 1 Introduction Our colleague Prof. Olivier de Bernon, from the École Française d’Extrême Orient in Paris, pointed out to us the need to understand astronomical systems in Cambo- dia, as he surmised that astronomical and mathematical ideas from India may have developed there in unexpected ways.1 A proper discussion of this problem requires an interdisciplinary approach where history, philology and archeology must be sup- plemented, as we shall see, by an understanding of the evolution of Astronomy and Mathematics up to modern times. This line of thought meets other recent lines of research, on the conceptual evolution of Mathematics, and on the definition and measurement of time, the latter being the main motivation of Indian Astronomy. In 1910 [1], the French engineer Félix Gaspard Faraut (1846–1911) described with great care the method of computing ephemerides in Cambodia used by the horas, i.e., the Khmer astronomers/astrologers.2 The names for the astronomical luminaries as well as the astronomical quantities [1] clearly show the Indian origin ∗F. Vernotte is with UTINAM, Observatory THETA of Franche Comté-Bourgogne, University of Franche Comté/UBFC/CNRS, 41 bis avenue de l’observatoire - B.P. -

On the Pin-And-Slot Device of the Antikythera Mechanism, with a New Application to the Superior Planets*
JHA, xliii (2012) ON THE PIN-AND-SLOT DEVICE OF THE ANTIKYTHERA MECHANISM, WITH A NEW APPLICATION TO THE SUPERIOR PLANETS* CHRISTIÁN C. CARMAN, Universidad Nacional de Quilmes/CONICET, ALAN THORNDIKE, University of Puget Sound, and JAMES EVANS, University of Puget Sound Perhaps the most striking and surprising feature of the Antikythera mechanism uncovered by recent research is the pin-and-slot device for producing the lunar inequality.1 This clever device, completely unattested in the ancient astronomical literature, produces a back-and-forth oscillation that is superimposed on a steady progress in longitude — nonuniform circular motion.2 Remarkably, the resulting motion is equivalent in angle (but not in spatial motion in depth) to the standard deferent-plus-epicycle lunar theory. Freeth et al. gave a proof of this equivalence, which is, however, a very complicated proof.3 One goal of the present paper is to offer a simpler proof that would have been well within the methods of the ancient astronomers and that, moreover, makes clearer the precise relation of the pin-and- slot model to the standard epicycle-plus-concentric and eccentric-circle theories. On the surviving portions of the Antikythera mechanism, only two devices are used to account for inequalities of motion. The first is the pin and slot, used for the lunar inequality. And the second is the nonuniform division of the zodiac scale, which, we have argued, was used to model the solar inequality.4 The second would obviously be of no use in representing planetary inequalities; so a natural question is to ask whether the pin-and-slot mechanism could be modified and extended to the planets, especially to the superior planets, for which the likely mechanical representations are less obvious than they are for the inferior planets. -

Elliptical Orbits
1 Ellipse-geometry 1.1 Parameterization • Functional characterization:(a: semi major axis, b ≤ a: semi minor axis) x2 y 2 b p + = 1 ⇐⇒ y(x) = · ± a2 − x2 (1) a b a • Parameterization in cartesian coordinates, which follows directly from Eq. (1): x a · cos t = with 0 ≤ t < 2π (2) y b · sin t – The origin (0, 0) is the center of the ellipse and the auxilliary circle with radius a. √ – The focal points are located at (±a · e, 0) with the eccentricity e = a2 − b2/a. • Parameterization in polar coordinates:(p: parameter, 0 ≤ < 1: eccentricity) p r(ϕ) = (3) 1 + e cos ϕ – The origin (0, 0) is the right focal point of the ellipse. – The major axis is given by 2a = r(0) − r(π), thus a = p/(1 − e2), the center is therefore at − pe/(1 − e2), 0. – ϕ = 0 corresponds to the periapsis (the point closest to the focal point; which is also called perigee/perihelion/periastron in case of an orbit around the Earth/sun/star). The relation between t and ϕ of the parameterizations in Eqs. (2) and (3) is the following: t r1 − e ϕ tan = · tan (4) 2 1 + e 2 1.2 Area of an elliptic sector As an ellipse is a circle with radius a scaled by a factor b/a in y-direction (Eq. 1), the area of an elliptic sector PFS (Fig. ??) is just this fraction of the area PFQ in the auxiliary circle. b t 2 1 APFS = · · πa − · ae · a sin t a 2π 2 (5) 1 = (t − e sin t) · a b 2 The area of the full ellipse (t = 2π) is then, of course, Aellipse = π a b (6) Figure 1: Ellipse and auxilliary circle. -
Earliest Astronomical Measurements the Relative
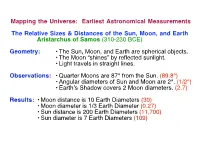
Mapping the Universe: Earliest Astronomical Measurements The Relative Sizes & Distances of the Sun, Moon, and Earth Aristarchus of Samos (310-230 BCE) Geometry: • The Sun, Moon, and Earth are spherical objects. • The Moon “shines” by reflected sunlight. • Light travels in straight lines. Observations: • Quarter Moons are 87° from the Sun. (89.8°) • Angular diameters of Sun and Moon are 2°. (1/2°) • Earth’s Shadow covers 2 Moon diameters. (2.7) Results: • Moon distance is 10 Earth Diameters (30) • Moon diameter is 1/3 Earth Diameter (0.27) • Sun distance is 200 Earth Diameters (11,700) • Sun diameter is 7 Earth Diameters (109) Aristarchus’ Methodology: Step 1: Measurement of Sun-Earth- Quarter Moon angle gives relative Earth-Sun and Earth-Moon distances (a ratio of 20:1*) Step 2: Measurement of Sun and Moon angular diameters gives relative Sun and Earth sizes on the same scale (20:1 again*) * these numbers are low by a factor of almost 20. Step 3: Adjust Earth Diameter to give the correct shadow size at the Moon’s distance. Moon Earth Sun Note that this procedure gives only relative distances and sizes. (See Eratosthenes below.) Note that Aristarchus argued for a heliocentric universe! Earliest Astronomical Measurements (continued) Eratosthenes (276-196 BCE): The Size of the Earth Digression: The Alexandrian Library (300 BCE-300 CE?) Observations • The Well at Syene & the Summer Solstice: α = 0 • The Obelisk at Alexandria: α = 1/50 circle Eratosthenes’ Methodology: Measurement • The Alexandria-Syene distance: 1,592 stadia • This corresponds to 1/50 of the Earth’s circumference Results • Earth Circumference is 1,592 x 50 = 79,600 stadia • Earth Diameter is 79,600 ÷ π = 25,337 stadia Conversion factor: 1 stadium is about 2 kilometers • Earth Diameter is 12,732 kilometers (12, 756 km) Note: Posidinius (135-51 BCE) used “simultaneous” observations of the bright star Canopus in the same way to obtain a size for the Earth. -

Librational Response of Europa, Ganymede, and Callisto with an Ocean for a Non-Keplerian Orbit
A&A 527, A118 (2011) Astronomy DOI: 10.1051/0004-6361/201015304 & c ESO 2011 Astrophysics Librational response of Europa, Ganymede, and Callisto with an ocean for a non-Keplerian orbit N. Rambaux1,2, T. Van Hoolst3, and Ö. Karatekin3 1 Université Pierre et Marie Curie, Paris VI, IMCCE, Observatoire de Paris, 77 avenue Denfert-Rochereau, 75014 Paris, France 2 IMCCE, Observatoire de Paris, CNRS UMR 8028, 77 avenue Denfert-Rochereau, 75014 Paris, France e-mail: [email protected] 3 Royal Observatory of Belgium, 3 avenue Circulaire, 1180 Brussels, Belgium e-mail: [tim.vanhoolst;ozgur.karatekin]@oma.be Received 30 June 2010 / Accepted 8 September 2010 ABSTRACT Context. The Galilean satellites Europa, Ganymede, and Callisto are thought to harbor a subsurface ocean beneath an ice shell but its properties, such as the depth beneath the surface, have not been well constrained. Future geodetic observations with, for example, space missions like the Europa Jupiter System Mission (EJSM) of NASA and ESA may refine our knowledge about the shell and ocean. Aims. Measurement of librational motion is a useful tool for detecting an ocean and characterizing the interior parameters of the moons. The objective of this paper is to investigate the librational response of Galilean satellites, Europa, Ganymede, and Callisto assumed to have a subsurface ocean by taking the perturbations of the Keplerian orbit into account. Perturbations from a purely Keplerian orbit are caused by gravitational attraction of the other Galilean satellites, the Sun, and the oblateness of Jupiter. Methods. We use the librational equations developed for a satellite with a subsurface ocean in synchronous spin-orbit resonance. -

Interplanetary Trajectories in STK in a Few Hundred Easy Steps*
Interplanetary Trajectories in STK in a Few Hundred Easy Steps* (*and to think that last year’s students thought some guidance would be helpful!) Satellite ToolKit Interplanetary Tutorial STK Version 9 INITIAL SETUP 1) Open STK. Choose the “Create a New Scenario” button. 2) Name your scenario and, if you would like, enter a description for it. The scenario time is not too critical – it will be updated automatically as we add segments to our mission. 3) STK will give you the opportunity to insert a satellite. (If it does not, or you would like to add another satellite later, you can click on the Insert menu at the top and choose New…) The Orbit Wizard is an easy way to add satellites, but we will choose Define Properties instead. We choose Define Properties directly because we want to use a maneuver-based tool called the Astrogator, which will undo any initial orbit set using the Orbit Wizard. Make sure Satellite is selected in the left pane of the Insert window, then choose Define Properties in the right-hand pane and click the Insert…button. 4) The Properties window for the Satellite appears. You can access this window later by right-clicking or double-clicking on the satellite’s name in the Object Browser (the left side of the STK window). When you open the Properties window, it will default to the Basic Orbit screen, which happens to be where we want to be. The Basic Orbit screen allows you to choose what kind of numerical propagator STK should use to move the satellite. -

Moon-Earth-Sun: the Oldest Three-Body Problem
Moon-Earth-Sun: The oldest three-body problem Martin C. Gutzwiller IBM Research Center, Yorktown Heights, New York 10598 The daily motion of the Moon through the sky has many unusual features that a careful observer can discover without the help of instruments. The three different frequencies for the three degrees of freedom have been known very accurately for 3000 years, and the geometric explanation of the Greek astronomers was basically correct. Whereas Kepler’s laws are sufficient for describing the motion of the planets around the Sun, even the most obvious facts about the lunar motion cannot be understood without the gravitational attraction of both the Earth and the Sun. Newton discussed this problem at great length, and with mixed success; it was the only testing ground for his Universal Gravitation. This background for today’s many-body theory is discussed in some detail because all the guiding principles for our understanding can be traced to the earliest developments of astronomy. They are the oldest results of scientific inquiry, and they were the first ones to be confirmed by the great physicist-mathematicians of the 18th century. By a variety of methods, Laplace was able to claim complete agreement of celestial mechanics with the astronomical observations. Lagrange initiated a new trend wherein the mathematical problems of mechanics could all be solved by the same uniform process; canonical transformations eventually won the field. They were used for the first time on a large scale by Delaunay to find the ultimate solution of the lunar problem by perturbing the solution of the two-body Earth-Moon problem. -

2 Coordinate Systems
2 Coordinate systems In order to find something one needs a system of coordinates. For determining the positions of the stars and planets where the distance to the object often is unknown it usually suffices to use two coordinates. On the other hand, since the Earth rotates around it’s own axis as well as around the Sun the positions of stars and planets is continually changing, and the measurment of when an object is in a certain place is as important as deciding where it is. Our first task is to decide on a coordinate system and the position of 1. The origin. E.g. one’s own location, the center of the Earth, the, the center of the Solar System, the Galaxy, etc. 2. The fundamental plan (x−y plane). This is often a plane of some physical significance such as the horizon, the equator, or the ecliptic. 3. Decide on the direction of the positive x-axis, also known as the “reference direction”. 4. And, finally, on a convention of signs of the y− and z− axes, i.e whether to use a left-handed or right-handed coordinate system. For example Eratosthenes of Cyrene (c. 276 BC c. 195 BC) was a Greek mathematician, elegiac poet, athlete, geographer, astronomer, and music theo- rist who invented a system of latitude and longitude. (According to Wikipedia he was also the first person to use the word geography and invented the disci- pline of geography as we understand it.). The origin of this coordinate system was the center of the Earth and the fundamental plane was the equator, which location Eratosthenes calculated relative to the parts of the Earth known to him. -

New Closed-Form Solutions for Optimal Impulsive Control of Spacecraft Relative Motion
New Closed-Form Solutions for Optimal Impulsive Control of Spacecraft Relative Motion Michelle Chernick∗ and Simone D'Amicoy Aeronautics and Astronautics, Stanford University, Stanford, California, 94305, USA This paper addresses the fuel-optimal guidance and control of the relative motion for formation-flying and rendezvous using impulsive maneuvers. To meet the requirements of future multi-satellite missions, closed-form solutions of the inverse relative dynamics are sought in arbitrary orbits. Time constraints dictated by mission operations and relevant perturbations acting on the formation are taken into account by splitting the optimal recon- figuration in a guidance (long-term) and control (short-term) layer. Both problems are cast in relative orbit element space which allows the simple inclusion of secular and long-periodic perturbations through a state transition matrix and the translation of the fuel-optimal optimization into a minimum-length path-planning problem. Due to the proper choice of state variables, both guidance and control problems can be solved (semi-)analytically leading to optimal, predictable maneuvering schemes for simple on-board implementation. Besides generalizing previous work, this paper finds four new in-plane and out-of-plane (semi-)analytical solutions to the optimal control problem in the cases of unperturbed ec- centric and perturbed near-circular orbits. A general delta-v lower bound is formulated which provides insight into the optimality of the control solutions, and a strong analogy between elliptic Hohmann transfers and formation-flying control is established. Finally, the functionality, performance, and benefits of the new impulsive maneuvering schemes are rigorously assessed through numerical integration of the equations of motion and a systematic comparison with primer vector optimal control. -

Mo on of the Planets on the Celes Al Sphere. the Heliocentric System
Moon of the planets on the celesal sphere. The heliocentric system. The development of the Copernican concept Moon of the planets on the celesal sphere. The heliocentric system. The development of the Copernican concept Scenariusz Lesson plan Moon of the planets on the celesal sphere. The heliocentric system. The development of the Copernican concept Source: licencja: CC 0. Ruch planet na sferze niebieskiej. System heliocentryczny. Rozwój idei kopernikańskiej You will learn to explain the differences between geocentric and heliocentric theory. Nagranie dostępne na portalu epodreczniki.pl nagranie abstraktu Before you start, answer the question. Explain what it means to say about Nicolaus Copernicus that he „stopped the Sun and moved the Earth”. Nagranie dostępne na portalu epodreczniki.pl nagranie abstraktu Our understanding of the Universe has evolved over time. Most of all the early cosmologic models assumed that the Earth was the centre of the Solar System, and not only this, but of the entire Universe. Aristarchus of Samos proposed the first heliocentric model in the third century B.C., but at this time this model did not play an important role. Path of the planet on the background of the stars observed from the Earth Source: GroMar, licencja: CC BY 3.0. Nagranie dostępne na portalu epodreczniki.pl nagranie abstraktu The ancient astronomers observed that planets usually moved east to west against the distant stars, but from time to time they changed the direction and the speed. This motion in the opposite direction was called retrograde motion. Nowadays we know that it is an apparent motion. The Greek astronomer Ptolemy used measurements of the sky to create geocentric model of the Universe. -

Pos(Antikythera & SKA)018
Building the Cosmos in the Antikythera Mechanism Tony Freeth1 Antikythera Mechanism Research Project 10 Hereford Road, South Ealing, London W54 4SE, United Kingdom E-mail: [email protected] PoS(Antikythera & SKA)018 Abstract Ever since its discovery by Greek sponge divers in 1901, the Antikythera Mechanism has inspired fascination and fierce debate. In the early years no-one knew what it was. As a result of a hundred years of research, particularly by Albert Rehm, Derek de Solla Price, Michael Wright and, most recently, by members of the Antikythera Mechanism Research Project, there has been huge progress in understanding this geared astronomical calculating machine. With its astonishing lunar anomaly mechanism, it emerges as a landmark in the history of technology and one of the true wonders of the ancient world. The latest model includes a mechanical representation of the Cosmos that exactly matches an inscription on the back cover of the instrument. We believe that we are now close to the complete machine. From Antikythera to the Square Kilometre Array: Lessons from the Ancients, Kerastari, Greece 12-15 June 2012 1 Speaker Copyright owned by the author(s) under the terms of the Creative Commons Attribution-NonCommercial-ShareAlike Licence. http://pos.sissa.it Building the Cosmos in the Antikythera Mechanism Tony Freeth 1. Ancient Astronomy Astronomy? Impossible to understand and madness to investigate... Sophocles Since astronomy is so difficult, I will try to keep everything as simple as possible! As all astronomers know well, the stars are fixed! When the ancients looked at the sky, they saw a number of astronomical bodies that moved relative to the stars.