Introduction to Physical Oceanography
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

How the Ocean Affects Weather & Climate
Ocean in Motion 6: How does the Ocean Change Weather and Climate? A. Overview 1. The Ocean in Motion -- Weather and Climate In this program we will tie together ideas from previous lectures on ocean circulation. The students will also learn about the similarities and interactions between the atmosphere and the ocean. 2. Contents of Packet Your packet contains the following activities: I. A Sea of Words B. Program Preparation 1. Focus Points OThe oceans and the atmosphere are closely linked 1. the sun heats the atmosphere as well as the oceans 2. water evaporates from the ocean into the atmosphere a. forms clouds and precipitation b. movement of any fluid (gas or liquid) due to heating creates convective currents OWeather and climate are two different things. 1. Winds a. Uneven heating and cooling of the atmosphere creates wind b. Global ocean surface current patterns are similar to global surface wind patterns c. wind patterns are analogous to ocean currents 2. Four seasons OAtmospheric motion 1. weather and air moves from high to low pressure areas 2. the earth's rotation also influences air and weather patterns 3. Atmospheric winds move surface ocean currents. ©1998 Project Oceanography Spring Series Ocean in Motion 1 C. Showtime 1. Broadcast Topics This broadcast will link into discussions on ocean and atmospheric circulation, wind patterns, and how climate and weather are two different things. a. Brief Review We know the modern reason for studying ocean circulation is because it is a major part of our climate. We talked about how the sun provides heat energy to the world, and how the ocean currents circulate because the water temperatures and densities vary. -
Understanding Eddy Field in the Arctic Ocean from High-Resolution Satellite Observations Igor Kozlov1, A
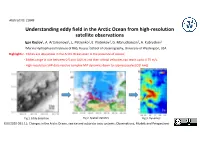
Abstract ID: 21849 Understanding eddy field in the Arctic Ocean from high-resolution satellite observations Igor Kozlov1, A. Artamonova1, L. Petrenko1, E. Plotnikov1, G. Manucharyan2, A. Kubryakov1 1Marine Hydrophysical Institute of RAS, Russia; 2School of Oceanography, University of Washington, USA Highlights: - Eddies are ubiquitous in the Arctic Ocean even in the presence of sea ice; - Eddies range in size between 0.5 and 100 km and their orbital velocities can reach up to 0.75 m/s. - High-resolution SAR data resolve complex MIZ dynamics down to submesoscales [O(1 km)]. Fig 1. Eddy detection Fig 2. Spatial statistics Fig 3. Dynamics EGU2020 OS1.11: Changes in the Arctic Ocean, sea ice and subarctic seas systems: Observations, Models and Perspectives 1 Abstract ID: 21849 Motivation • The Arctic Ocean is a host to major ocean circulation systems, many of which generate eddies transporting water masses and tracers over long distances from their formation sites. • Comprehensive observations of eddy characteristics are currently not available and are limited to spatially and temporally sparse in situ observations. • Relatively small Rossby radii of just 2-10 km in the Arctic Ocean (Nurser and Bacon, 2014) also mean that most of the state-of-art hydrodynamic models are not eddy-resolving • The aim of this study is therefore to fill existing gaps in eddy observations in the Arctic Ocean. • To address it, we use high-resolution spaceborne SAR measurements to detect eddies over the ice-free regions and in the marginal ice zones (MIZ). EGU20 -OS1.11 – Kozlov et al., Understanding eddy field in the Arctic Ocean from high-resolution satellite observations 2 Abstract ID: 21849 Methods • We use multi-mission high-resolution spaceborne synthetic aperture radar (SAR) data to detect eddies over open ocean and marginal ice zones (MIZ) of Fram Strait and Beaufort Gyre regions. -

Basic Concepts in Oceanography
Chapter 1 XA0101461 BASIC CONCEPTS IN OCEANOGRAPHY L.F. SMALL College of Oceanic and Atmospheric Sciences, Oregon State University, Corvallis, Oregon, United States of America Abstract Basic concepts in oceanography include major wind patterns that drive ocean currents, and the effects that the earth's rotation, positions of land masses, and temperature and salinity have on oceanic circulation and hence global distribution of radioactivity. Special attention is given to coastal and near-coastal processes such as upwelling, tidal effects, and small-scale processes, as radionuclide distributions are currently most associated with coastal regions. 1.1. INTRODUCTION Introductory information on ocean currents, on ocean and coastal processes, and on major systems that drive the ocean currents are important to an understanding of the temporal and spatial distributions of radionuclides in the world ocean. 1.2. GLOBAL PROCESSES 1.2.1 Global Wind Patterns and Ocean Currents The wind systems that drive aerosols and atmospheric radioactivity around the globe eventually deposit a lot of those materials in the oceans or in rivers. The winds also are largely responsible for driving the surface circulation of the world ocean, and thus help redistribute materials over the ocean's surface. The major wind systems are the Trade Winds in equatorial latitudes, and the Westerly Wind Systems that drive circulation in the north and south temperate and sub-polar regions (Fig. 1). It is no surprise that major circulations of surface currents have basically the same patterns as the winds that drive them (Fig. 2). Note that the Trade Wind System drives an Equatorial Current-Countercurrent system, for example. -

Chapter 7 100 Years of the Ocean General Circulation
CHAPTER 7 WUNSCH AND FERRARI 7.1 Chapter 7 100 Years of the Ocean General Circulation CARL WUNSCH Massachusetts Institute of Technology, and Harvard University, Cambridge, Massachusetts RAFFAELE FERRARI Massachusetts Institute of Technology, Cambridge, Massachusetts ABSTRACT The central change in understanding of the ocean circulation during the past 100 years has been its emergence as an intensely time-dependent, effectively turbulent and wave-dominated, flow. Early technol- ogies for making the difficult observations were adequate only to depict large-scale, quasi-steady flows. With the electronic revolution of the past 501 years, the emergence of geophysical fluid dynamics, the strongly inhomogeneous time-dependent nature of oceanic circulation physics finally emerged. Mesoscale (balanced), submesoscale oceanic eddies at 100-km horizontal scales and shorter, and internal waves are now known to be central to much of the behavior of the system. Ocean circulation is now recognized to involve both eddies and larger-scale flows with dominant elements and their interactions varying among the classical gyres, the boundary current regions, the Southern Ocean, and the tropics. 1. Introduction physical regimes, understanding of the ocean until relatively recently greatly lagged that of the atmo- In the past 100 years, understanding of the general sphere. As in almost all of fluid dynamics, progress circulation of the ocean has shifted from treating it as an in understanding has required an intimate partnership essentially laminar, steady-state, slow, almost geological, between theoretical description and observational or flow, to that of a perpetually changing fluid, best charac- laboratory tests. The basic feature of the fluid dynamics terized as intensely turbulent with kinetic energy domi- of the ocean, as opposed to that of the atmosphere, has nated by time-varying flows. -

Fronts in the World Ocean's Large Marine Ecosystems. ICES CM 2007
- 1 - This paper can be freely cited without prior reference to the authors International Council ICES CM 2007/D:21 for the Exploration Theme Session D: Comparative Marine Ecosystem of the Sea (ICES) Structure and Function: Descriptors and Characteristics Fronts in the World Ocean’s Large Marine Ecosystems Igor M. Belkin and Peter C. Cornillon Abstract. Oceanic fronts shape marine ecosystems; therefore front mapping and characterization is one of the most important aspects of physical oceanography. Here we report on the first effort to map and describe all major fronts in the World Ocean’s Large Marine Ecosystems (LMEs). Apart from a geographical review, these fronts are classified according to their origin and physical mechanisms that maintain them. This first-ever zero-order pattern of the LME fronts is based on a unique global frontal data base assembled at the University of Rhode Island. Thermal fronts were automatically derived from 12 years (1985-1996) of twice-daily satellite 9-km resolution global AVHRR SST fields with the Cayula-Cornillon front detection algorithm. These frontal maps serve as guidance in using hydrographic data to explore subsurface thermohaline fronts, whose surface thermal signatures have been mapped from space. Our most recent study of chlorophyll fronts in the Northwest Atlantic from high-resolution 1-km data (Belkin and O’Reilly, 2007) revealed a close spatial association between chlorophyll fronts and SST fronts, suggesting causative links between these two types of fronts. Keywords: Fronts; Large Marine Ecosystems; World Ocean; sea surface temperature. Igor M. Belkin: Graduate School of Oceanography, University of Rhode Island, 215 South Ferry Road, Narragansett, Rhode Island 02882, USA [tel.: +1 401 874 6533, fax: +1 874 6728, email: [email protected]]. -
Mapping Current and Future Priorities
Mapping Current and Future Priorities for Coral Restoration and Adaptation Programs International Coral Reef Initiative (ICRI) Ad Hoc Committee on Reef Restoration 2019 Interim Report This report was prepared by James Cook University, funded by the Australian Institute for Marine Science on behalf of the ICRI Secretariat nations Australia, Indonesia and Monaco. Suggested Citation: McLeod IM, Newlands M, Hein M, Boström-Einarsson L, Banaszak A, Grimsditch G, Mohammed A, Mead D, Pioch S, Thornton H, Shaver E, Souter D, Staub F. (2019). Mapping Current and Future Priorities for Coral Restoration and Adaptation Programs: International Coral Reef Initiative Ad Hoc Committee on Reef Restoration 2019 Interim Report. 44 pages. Available at icriforum.org Acknowledgements The ICRI ad hoc committee on reef restoration are thanked and acknowledged for their support and collaboration throughout the process as are The International Coral Reef Initiative (ICRI) Secretariat, Australian Institute of Marine Science (AIMS) and TropWATER, James Cook University. The committee held monthly meetings in the second half of 2019 to review the draft methodology for the analysis and subsequently to review the drafts of the report summarising the results. Professor Karen Hussey and several members of the ad hoc committee provided expert peer review. Research support was provided by Melusine Martin and Alysha Wincen. Advisory Committee (ICRI Ad hoc committee on reef restoration) Ahmed Mohamed (UN Environment), Anastazia Banaszak (International Coral Reef Society), -
Ekman Layer at the Sea Surface • Ekman Mass Transport • Application of Ekman Theory • Langmuir Circulation • Important Concepts
Principle of Oceanography Gholamreza Mashayekhinia 2013_2014 Response of the Upper Ocean to Winds Contents • Inertial Motion • Ekman Layer at the Sea Surface • Ekman Mass Transport • Application of Ekman Theory • Langmuir Circulation • Important Concepts Inertial Motion The response of the ocean to an impulse that sets the water in motion. For example, the impulse can be a strong wind blowing for a few hours. The water then moves under the influence of coriolis force and gravity. No other forces act on the water. In physics, the Coriolis effect is a deflection of moving objects when they are viewed in a rotating reference frame. This low pressure system over Iceland spins counter-clockwise due to balance between the Coriolis force and the pressure gradient force. Such motion is said to be inertial. The mass of water continues to move due to its inertia. If the water were in space, it would move in a straight line according to Newton's second law. But on a rotating Earth, the motion is much different. The equations of motion for a frictionless ocean are: 푑푢 1 휕푝 = − + 2Ω푣 푠푖푛휑 (1a) 푑푡 휌 휕푥 푑푣 1 휕푝 = − − 2Ω푢 푠푖푛휑 (1b) 푑푡 휌 휕푦 푑휔 1 휕푝 = − + 2Ω푢 푐표푠휑 − 푔 (1c) 푑푡 휌 휕푥 Where p is pressure, Ω = 2 π/(sidereal day) = 7.292 × 10-5 rad/s is the rotation of the Earth in fixed coordinates, and φ is latitude. We have also used Fi = 0 because the fluid is frictionless. Let's now look for simple solutions to these equations. To do this we must simplify the momentum equations. -
Satellite Oceanography for Ocean Forecasting
1 SATELLITE OCEANOGRAP HY FOR OCEAN FORECASTING P.Y. Le Traon CLS Space Oceanography Division Ocean Forecasting Oristano Summer School July 1997 Revised July 2000 - PAGE 1 - 1. OUTLINE This lecture aims at providing a general introduction to satellite oceanography in the context of ocean forecasting. Satellite oceanography is an essential component in the development of operational oceanography. Major advances in sensor development and scientific analysis have been achieved in the last 20 years. As a result, several techniques are now mature (e.g. altimetry, infra-red imagery) and provide quantitative and unique measurements of the ocean system. We begin with a general overview of space oceanography, summarizing why it is so useful for ocean forecasting and briefly describing satellite oceanography techniques, before looking at the status of present and future missions. We will then turn to satellite altimetry, probably the most important and mature technique currently in use for ocean forecasting. We will also detail measurement principles and content, explain the basic data processing, including the methodology for merging data sets, and provide an overview of results recently obtained with TOPEX/POSEIDON and ERS-1/2 altimeter data. Lastly, we will focus on real-time aspects crucial for ocean forecasting. Perspectives will be given in the conclusion. 2. OVERVIEW OF SPACE OCEANOGRAPHY 2.1 WHY DO WE NEED SATELLITES FOR OCEAN FORECASTING? An ocean hindcasting/forecasting system must be based on the assimilation of observation data into a numerical model. It also must have precise forcing data. The ocean is, indeed, a turbulent system. ―Realistic‖ models of the ocean are impossible to construct owing both to uncertainty of the governing physics and of an initial state (not to mention predictability issues). -

Improved Modelling of the Messinian Salinity Crisis and Conceptual Implications
Palaeogeography, Palaeoclimatology, Palaeoecology 238 (2006) 349–372 www.elsevier.com/locate/palaeo Improved modelling of the Messinian Salinity Crisis and conceptual implications Paul-Louis Blanc Institut de Radioprotection et de Sûreté Nucléaire, Boîte Postale 17, 92262 Fontenay-aux-roses Cedex, France Received 17 April 2003; accepted 7 March 2006 Abstract This paper presents the last developments of a simple oceanographic modelling of the water and salt budgets of the Mediterranean Sea during the late Miocene Salinity Crisis. The Messinian Mediterranean is treated as analogous to the present one, i.e. divided into two main basins separated by a sill at shallow or intermediate depth. When the supply of marine water from the Atlantic is progressively reduced, both basins undergo a rise in salinity, until saturation is reached: this is when the true evaporitic sedimentation begins, before the level drawdown. The partition of the Mediterranean into two mains basins causes a shift in the evaporitic sedimentation from the distal (eastern) basin to the proximal (western) basin, so that the evaporitic deposits are not fully contemporaneous in the western and the eastern basin. The drawdown is limited by the equilibrium of the evaporation and chemical activity of the brines at the surface, against the surface area and evaporation. Attempts at adjusting the model both to an accurate stratigraphic frame and to a rough budget of the evaporites shows that the Upper Evaporites and brackish-water Lago-mare series must have been deposited as secondary deposits, after the closure of the Atlantic passages was completed. The present evaporitic potentialities of the Mediterranean Sea remains quite as strong as during the Miocene, so that climatic change cannot be inferred from the MSC itself. -

The East Greenland Current North of Denmark Strait: Part I'
The East Greenland Current North of Denmark Strait: Part I' K. AAGAARD AND L. K. COACHMAN2 ABSTRACT.Current measurements within the East Greenland Current during winter1965 showed that above thecontinental slope there were large on-shore components of flow, probably representing a westward Ekman transport. The speed did not decrease significantly with depth, indicatingthat the barotropic mode domi- nates the flow. Typical current speeds were10 to 15 cm. sec.-l. The transport of the current during winter exceeds 35 x 106 m.3 sec-1. This is an order of magnitude greater than previous estimates and, although there may be seasonal fluctuations in the transport, it suggests that the East Greenland Current primarily represents a circulation internal to the Greenland and Norwegian seas, rather than outflow from the central Polarbasin. RESUME. Lecourant du Groenland oriental au nord du dbtroit de Danemark. Aucours de l'hiver de 1965, des mesures effectukes danslecourant du Groenland oriental ont montr6 que sur le talus continental, la circulation comporte d'importantes composantes dirigkes vers le rivage, ce qui reprksente probablement un flux vers l'ouest selon le mouvement #Ekman. La vitesse ne diminue pas beau- coup avec laprofondeur, ce qui indique que le mode barotropique domine la circulation. Les vitesses typiques du courant sont de 10 B 15 cm/s-1. Au cows de l'hiver, le debit du courant dkpasse 35 x 106 m3/s-1. Cet ordre de grandeur dkpasse les anciennes estimations et, malgrC les fluctuations saisonnihres possibles, il semble que le courant du Groenland oriental correspond surtout B une circulation interne des mers du Groenland et de Norvhge, plut6t qu'8 un Bmissaire du bassin polaire central. -
Atlas of the Mediterranean Seamounts and Seamount-Like Structures
Atlas of the Mediterranean Seamounts and Seamount-like Structures ULISSE 44 N JANUA S.LUCIA SPINOLA OCCHIALI ARAGÓ CALYPSO HILLS 42 CIALDI FELIBRES HILLS 42 TIBERINO ETRUSCHI LA RENAIXENÇA HILLS ALBANO MONTURIOL S.FELIÙ SMS DAUNO VERCELLI SALVÁ BRUTUS SPARTACUS CASSINIS EBRO BARONIE-K MARUSSI SECCHI-ADRIANO FARFALLE ALBATROS-CICERONE CRESQUES BERTRAN SELLI VENUS MORROT DE LA CIUTADELLA GORTANI SELE MONTE DELLA RONDINE TACITO SÓLLER ALABE DE MARCHI SIRENE SARDINIA D’ANCONA FLAVIO GIOIA AMENDOLARA 40 SALLUSTIO 40 MAGNAGHI POSEIDONE ROSSANO APHRODITI VAVILOV TIBULLO DIAMANTE MORROT CORNAGLIA V.EMANUELE CARIATI DE SA DRAGONERA MAJOR ISSEL PALINURO-STRABO OVIDIO VILADESTERS CATULLO GLAVKI ORAZIO MARSILI-PLINIO GLABRO ENOTRIO MANSEL JOHNSTON STONY SPONGE QUIRRA ENEA TITO LIVIO VIRGILIO ALCIONE AUGUSTO SES OLIVES GARIBALDI-GLAUCO LAMETINO 1 BROUKER JAUME 1 CORNACYA LAMETINO 2 COLOM TRAIANO LUCREZIO STOKES XABIA-IBIZA VESPASIANO LITERI SINAYA VALLSECA SISIFO EMILE BAUDOT GIULIO CESARE-CAESAR DREPANO ENARETE CASONI FONTSERÈ ICHNUSA IRA NAVTILOS CABO DE LA NAO AUSIÀS MARCH ANCHISE BELL GUYOT POMPEO PROMETEO MARTORELL ACESTE-TIBERIO EOLO FORMENTERA SOLUNTO ALKYONI FERRER SCUSO SAN VITO LOS MARTINES ALÍ BEI FINALE DON JUAN RESGUI RIBA SENTINELLE (SKERKI) BALIKÇI EL38 PLANAZO BIDDLECOMBE SILVIA 38 PLIS PLAS KEITH SECO DE PALOS ESTAFETTE HECATE ADVENTURE TALBOT TETIDE 170 km ÁGUILAS GALATEA PANTELLERIA ANFITRITE EMPEDOCLE PINNE ANTEO 2 KHAYR-AL-DIN CIMOTOE ANTEO 3 ABUBACER FOERSTNER NAMELESS PNT. E MADREPORE ANTEO 1 AVENZOAR PNT. CB CHELLA CABO DE GATA ANGELINA ALFEO SABINAR PNT. SW AVEMPACE-ALGARROBO MAIMONIDES RIDGE BANNOCK KOLUMBO DJIBOUTI-HERRADURA POLLUX BILIM ADRA-AVERROES MAIMONIDES BIRSA PNT. SE HERRADURA-DJIBOUTI LINOSA III AL-MANSOUR A EL SEGOVIANO DJIBOUTI VILLE ALBORÁN LINOSA I LINOSA II HÉSPERIDES HÉRCULES EL IDRISSI YUSUF KARPAS CATIFAS-W. -

Ocean-Climate.Org
ocean-climate.org THE INTERACTIONS BETWEEN OCEAN AND CLIMATE 8 fact sheets WITH THE HELP OF: Authors: Corinne Bussi-Copin, Xavier Capet, Bertrand Delorme, Didier Gascuel, Clara Grillet, Michel Hignette, Hélène Lecornu, Nadine Le Bris and Fabrice Messal Coordination: Nicole Aussedat, Xavier Bougeard, Corinne Bussi-Copin, Louise Ras and Julien Voyé Infographics: Xavier Bougeard and Elsa Godet Graphic design: Elsa Godet CITATION OCEAN AND CLIMATE, 2016 – Fact sheets, Second Edition. First tome here: www.ocean-climate.org With the support of: ocean-climate.org HOW DOES THE OCEAN WORK? OCEAN CIRCULATION..............................………….....………................................……………….P.4 THE OCEAN, AN INDICATOR OF CLIMATE CHANGE...............................................…………….P.6 SEA LEVEL: 300 YEARS OF OBSERVATION.....................……….................................…………….P.8 The definition of words starred with an asterisk can be found in the OCP little dictionnary section, on the last page of this document. 3 ocean-climate.org (1/2) OCEAN CIRCULATION Ocean circulation is a key regulator of climate by storing and transporting heat, carbon, nutrients and freshwater all around the world . Complex and diverse mechanisms interact with one another to produce this circulation and define its properties. Ocean circulation can be conceptually divided into two Oceanic circulation is very sensitive to the global freshwater main components: a fast and energetic wind-driven flux. This flux can be described as the difference between surface circulation, and a slow and large density-driven [Evaporation + Sea Ice Formation], which enhances circulation which dominates the deep sea. salinity, and [Precipitation + Runoff + Ice melt], which decreases salinity. Global warming will undoubtedly lead Wind-driven circulation is by far the most dynamic. to more ice melting in the poles and thus larger additions Blowing wind produces currents at the surface of the of freshwaters in the ocean at high latitudes.