变焦鱼眼镜头系统设计 侯国柱 吕丽军 Design of Zoom Fish-Eye Lens Systems Hou Guozhu, Lu Lijun
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A 7.5X Afocal Zoom Lens Design and Kernel Aberration Correction Using Reversed Ray Tracing Methods
A 7.5X Afocal Zoom Lens Design and Kernel Aberration Correction Using Reversed Ray Tracing Methods Item Type text; Electronic Thesis Authors Zhou, Xi Publisher The University of Arizona. Rights Copyright © is held by the author. Digital access to this material is made possible by the University Libraries, University of Arizona. Further transmission, reproduction, presentation (such as public display or performance) of protected items is prohibited except with permission of the author. Download date 23/09/2021 23:12:56 Link to Item http://hdl.handle.net/10150/634395 A 7.5X Afocal Zoom Lens Design and Kernel Aberration Correction Using Reversed Ray Tracing Methods by Xi Zhou ________________________________ Copyright © Xi Zhou 2019 A Thesis Submitted to the Faculty of the JAMES C. WYANT COLLEGE OF OPTICAL SCIENCES In Partial Fulfillment of the requirements For the degree of MASTER OF SCIENCE In the Graduate College THE UNIVERSITY OF ARIZONA 1 2 Table of Contents List of Figures ................................................................................................................................. 5 ABSTRACT .................................................................................................................................... 9 KEYWORDS ................................................................................................................................ 10 1. INTRODUCTION .................................................................................................................... 11 1.1 Motivation .......................................................................................................................... -

Starkish Xpander Lens
STARKISH XPANDER LENS Large sensor sizes create beautiful images, but they can also pose problems without the right equipment. By attaching the Xpander Lens to your cinema lenses, you can now enjoy full scale ability to shoot with large sensors including 6K without compromising focal length capability. The Kish Xpander Lens allows full sensor coverage for the ARRI Alexa and RED Dragon cameras and is compatible for a wide range of cinema lenses to prevent vignetting: . Angenieux Optimo 17-80mm zoom lens . Angenieux Optimo 24-290mm zoom lens . Angenieux Compact Optimo zooms . Cooke 18-100mm zoom lens . Angenieux 17-102mm zoom lens . Angenieux 25-250mm HR zoom lens Whether you are shooting with the ARRI Alexa Open Gate or Red Dragon 6K, the Xpander Lens is the latest critical attachment necessary to prevent vignetting so you can maximize the most out of large sensor coverage. SPECIFICATIONS Version 1,15 Version 1,21 Image expansion factor: 15 % larger (nominal) Image expansion factor: 21 % larger (nominal) Focal Length: X 1.15 Focal length 1.21 Light loss: 1/3 to ½ stop Light Loss 1/2 to 2/3 stop THE XPANDER LENS VS. THE RANGE EXTENDER Even though the Lens Xpander functions similar to the lens range extender attachment, in terms of focal length and light loss factors, there is one fundamental difference to appreciate. The Xpander gives a larger image dimension by expanding the original image to cover a larger sensor area. This accessory is designed to maintain the optical performance over the larger image area. On the other hand, the range extender is also magnifying the image (focal length gets longer) but this attachment only needs to maintain the optical performance over the original image area. -

Refractive Optical Design Systems • Many Different Types of Lens Systems
Refractive Optical Design Systems • Many different types of lens systems used • Want to look at each from the following Performance Requirements • Field of View: How much of a object is seen in the image from the lens system • F# • Packaging requirements • Spectral Range Single Element • Poor image quality • Very small field of view • Chromatic Aberrations – only use a high f# • However fine for some applications eg Laser with single line • Where just want a spot, not a full field of view Landscape Lens • Single lens but with aperture stop added • i.e restriction on lens separate from the lens • Lens is “bent” around the stop • Reduces angle of incidence – thus off axis aberrations • Aperture either in front or back • Simple cameras use this Achromatic Doublet • Brings red and blue into same focus • Green usually slightly defocused • Chromatic blur 25 less than singlet (for f#=5 lens) • Cemented achromatic doublet poor at low f# • Slight improvement if add space between lens • Removes 5th order spherical Cooke Triplet Anastigmats • Three element lens which limits angle of incidence • Good performance for many applications • Designed in England by Taylor at “Cooke & Son” in 1893 • Created a photo revolution: simple elegant high quality lens • Gave sharp margins and detail in shadows • Lens 2 is negative & smaller than lenses 1 & 3 positives • Have control of 6 radii & 2 spaces • Allows balancing of 7 primary aberrations 1. Spherical 2. Coma 3. Astigmatism 4. Axial colour 5. Lateral colour 6. Distortion 7. Field curvature • Also control -

Choosing Digital Camera Lenses Ron Patterson, Carbon County Ag/4-H Agent Stephen Sagers, Tooele County 4-H Agent
June 2012 4H/Photography/2012-04pr Choosing Digital Camera Lenses Ron Patterson, Carbon County Ag/4-H Agent Stephen Sagers, Tooele County 4-H Agent the picture, such as wide angle, normal angle and Lenses may be the most critical component of the telescopic view. camera. The lens on a camera is a series of precision-shaped pieces of glass that, when placed together, can manipulate light and change the appearance of an image. Some cameras have removable lenses (interchangeable lenses) while other cameras have permanent lenses (fixed lenses). Fixed-lens cameras are limited in their versatility, but are generally much less expensive than a camera body with several potentially expensive lenses. (The cost for interchangeable lenses can range from $1-200 for standard lenses to $10,000 or more for high quality, professional lenses.) In addition, fixed-lens cameras are typically smaller and easier to pack around on sightseeing or recreational trips. Those who wish to become involved in fine art, fashion, portrait, landscape, or wildlife photography, would be wise to become familiar with the various types of lenses serious photographers use. The following discussion is mostly about interchangeable-lens cameras. However, understanding the concepts will help in understanding fixed-lens cameras as well. Figures 1 & 2. Figure 1 shows this camera at its minimum Lens Terms focal length of 4.7mm, while Figure 2 shows the110mm maximum focal length. While the discussion on lenses can become quite technical there are some terms that need to be Focal length refers to the distance from the optical understood to grasp basic optical concepts—focal center of the lens to the image sensor. -

Astrophotography a Beginner’S Guide
Astrophotography A Beginner’s Guide By James Seaman Copyright © James Seaman 2018 Contents Astrophotography ................................................................................................................................... 5 Equipment ........................................................................................................................................... 6 DSLR Cameras ..................................................................................................................................... 7 Sensors ............................................................................................................................................ 7 Focal Length .................................................................................................................................... 8 Exposure .......................................................................................................................................... 9 Aperture ........................................................................................................................................ 10 ISO ................................................................................................................................................. 11 White Balance ............................................................................................................................... 12 File Formats .................................................................................................................................. -
Lser's Glide to Digiscoping
USEr’s gUIDE Digiscoping THE DIGITAL ERA has spawned a plethora of new technologies, revolutionising the way we capture and communicate information. Birding has been affected in many ways, from the way we store data on birds, record and play back their calls, and share our observations with fellow birders around the world. But for many amateur birders, one of the biggest changes has resulted from the replacement of film with digital cameras. In a series of two articles, Peter Ryan discusses the pros and cons of digiscoping and digital SLR cameras. ntil recently it was axiomatic that you could be either a birder or a bird photographer. To take good Upictures of birds required an ar senal of expensive equipment and endless patience. You would get to know your subjects intimately, but you’d hardly race around seeing large numbers of birds. The advent of digital cameras has changed this dramatically, by allowing even the keenest of twitchers to capture images of the birds they see. The revolution started with digiscop- ing. This new approach to bird photo- graphy uses compact digital cameras to capture surprisingly good-quality images through traditional birding optics – usually a telescope (often called a spot- ting ’scope), but you can also take pictures through binoculars. For some time there have been adapters which allow a spotting ’scope to be used as a telephoto lens on a single-lens reflex (SLR) camera body, but the quality of the images isn’t competi- tive because the amount of light coming PETER RYAN through a ’scope is not really adequate Attaching a digital SLR to a telescope may seem like a perfect solution to many of the for film photography. -

Variogon - Zoom Lenses , Jos
Variogon - Zoom Lenses , Jos. Schneider Optische Werke GmbH What is a Variogon? „Variogon" is the brand name for a vario-lens made by "Jos. Schneider Optische Werke GmbH". But what is a vario-lens? It is a lens that has no fixed focal length and can be changed by the user with certain limitations. This is accomplished without having to bring the image of the subject into focus again and again each time the focal length is changed. A lens of this kind is also known as a zoom lens. Fig. 1: Optical and mechanical competence in construction and production: Cross section of the 30-fold zoom-lens Variogon 1.8 / 6 - 180 mm for Super-8mm narrow-gauge film Vario-lenses were already under development at Schneider-Kreuznach by the mid-50s.Because of our extensive experience in optical calculation, construction, and full-scale serial production, the vario-lenses were found in a wide range of applications: For television ( TV-Variogon ) and surveillance cameras in the still photography ( single-lens reflex cameras ) - here again in the 35 mm and medium-format sector for enlargers in the darkroom ( Betavaron ) for variable still projection ( Vario-Cine-Xenon ) in various OEM applications for designed specifically for certain customers, e.g., in printing, scanning and reproduction technology (Variomorphot ). In the most recent technical innovation in photography, digital photography, the Variogon has also assumed a position of importance. As an integrated lens with variable focal length, it finds use in the series of various Kodak EasyShare zoom digital cameras. The following list offers a short historical retrospective, together with background information about the "Variogon"-lens in its extremely widely varied areas of use: Different areas of application of a zoom-lens Variogon lenses for narrow-gauge film Variogons in television technology 35 mm- / medium-format vario-lenses Enlarging technology with Betavaron file:///D:/1%261-SK-Website-20110517/knowhow/variogon_e.htm[07.03.2013 10:56:25] The way a zoom lens works, Jos. -

Choosing a Lens of the Right Focal Length That You Will Get the Appropriate Angle of View
How to choose a camera lens Understanding the technology SUMMARY When you buy a camera, make sure the lens is suited for the intended purpose. With the right lens, you can greatly enhance the results you achieve in a particular type of photography and, by having a variety of lenses, you can greatly extend the usefulness of your camera. This paper provides a basic introduction to the principles of camera lenses. It explains the terminology: what is meant by focal length and f/number? Choose the right lens and taking good photographs becomes so much easier! The Basics The most important component of your camera is the lens. It’s no good having a camera with an impressively large number of megapixels if the lens is not up to the job. A lens has two basic properties: Focal length This determines the field of view of the lens. To match human vision, you’d need a lens with a focal length of about 35mm (in photography, focal length is always measured in millimetres). The normal, or standard, focal length for a camera lens is 50mm - anything smaller is called wide-angle, anything greater is called telephoto. A camera lens offering a range of focal lengths is called a zoom lens; one of fixed focal length is called a prime lens. f/number The ratio of the focal length of the lens (f) to its effective diameter: the size of its ‘window’ on the outside world , or aperture. The f/number is a measure of the light gathering power of the lens (called its speed). -

BRAVO! Summer Employee Institute 2012 How to Buy a Digital Camera
BRAVO! Summer Employee Institute 2012 How to Buy a Digital Camera What is a Digital Camera? A digital camera is a camera that captures both still images and video as well. A digital camera is different from conventional film cameras because still images and videos are recorded onto an electronic image sensor. Both conventional and digital cameras operate in a similar manner, they differ because unlike film cameras, digital cameras can immediately produce an image that can be displayed on the devices screen. The images the digital cameras record can also be stored or deleted from memory. Digital cameras also possess the ability to record moving images or videos and also capture sound. The first digital camera was invented in 1975 at the Eastman Kodak company, by an engineer named Steve Sasson. Steps to Buying a Digital Camera 1. What do you need from a Digital Camera: Determine the main purpose you will be buying the digital camera for. If you are going on vacation and will be using it for family photos, then you do not need a $2,000 digital camera. 2. Do you need a DSLR: A Digital Single Lens Reflex camera is a more expensive digital camera. Used for more professional photography sessions that also gives the photographer more creative control of the shoots. 3. Shutter Speed: The speed between captures is very important depending on the activity being captured. Some cameras lag in the time between captures, while others do not. 4. Image Stabilization: Automatically stabilizes the capture from a person’s shaky hands. Lower end digital may not have this feature, it is something the purchaser must look into. -

Vignette and Exposure Calibration and Compensation
Vignette and Exposure Calibration and Compensation Dan B Goldman and Jiun-Hung Chen University of Washington Figure 1 On the left, a panoramic sequence of images showing vignetting artifacts. Note the change in brightness at the edge of each image. Although the effect is visually subtle, this brightness change corresponds to a 20% drop in image intensity from the center to the corner of each image. On the right, the same sequence after vignetting is removed. Abstract stereo correlation and optical flow. Yet despite its occur- rence in essentially all photographed images, and its detri- We discuss calibration and removal of “vignetting” (ra- mental effect on these algorithms and systems, relatively dial falloff) and exposure (gain) variations from sequences little attention has been paid to calibrating and correcting of images. Unique solutions for vignetting, exposure and vignette artifacts. scene radiances are possible when the response curve is As we demonstrate, vignetting can be corrected easily known. When the response curve is unknown, an exponen- using sequences of natural images without special calibra- tial ambiguity prevents us from recovering these parameters tion objects or lighting. Our approach can be used even uniquely. However, the vignetting and exposure variations for existing panoramic image sequences in which nothing is can nonetheless be removed from the images without resolv- known about the camera. Figure 1 shows a series of aligned ing this ambiguity. Applications include panoramic image images, exhibiting noticeable brightness change along the mosaics, photometry for material reconstruction, image- boundaries of the images, even though the exposure of each based rendering, and preprocessing for correlation-based image is identical. -
Working with Your Camera
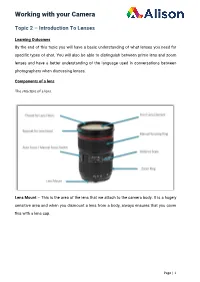
Working with your Camera Topic 2 – Introduction To Lenses Learning Outcomes By the end of this topic you will have a basic understanding of what lenses you need for specific types of shot. You will also be able to distinguish between prime lens and zoom lenses and have a better understanding of the language used in conversations between photographers when discussing lenses. Components of a lens The structure of a lens. Lens Mount – This is the area of the lens that we attach to the camera body. It is a hugely sensitive area and when you dismount a lens from a body, always ensures that you cover this with a lens cap. Page | 1 Working with your Camera Zoom Ring – This applies to lenses that have a ranging focal length. The zoom ring adjusts the focal length of the lens, allowing you to move closer or further away from your subject. Distance Scale – The distance scale is simply an accurate reading of what your zoom ring is doing. It will tell you what focal length you are at if you are unsure. Autofocus/ Manual Focus Switch – This is simply a switch which allows you to shoot your subject using autofocus or it gives you the opportunity to manually control focus yourself. Manual Focusing Ring – This ring will help you to adjust the focus of your subject, but only if you are using the manual focus mode. On a zoom lens, this ring will adjust the focus at whatever focal length you are zoomed into. Bayonet For Lens Hood – This is simply the opposite to the lens cap. -

General Lens Catalog
LENS CATALOGUE 2019.8.E Di series for DSLR cameras Di II series for APS-C DSLR cameras 17 SP 15-30mm F/2.8 Di VC USD G2 (Model A041) 16 10-24mm F/3.5-4.5 Di II VC HLD (Model B023) 16 17-35mm F/2.8-4 Di OSD (Model A037) 19 16-300mm F/3.5-6.3 Di II VC PZD MACRO (Model B016) 13 SP 24-70mm F/2.8 Di VC USD G2 (Model A032) 21 SP AF17-50mm F/2.8 XR Di II VC (Model B005) 21 SP AF28-75mm F/2.8 XR Di (Model A09) 21 SP AF17-50mm F/2.8 XR Di II (Model A16) 20 28-300mm F/3.5-6.3 Di VC PZD (Model A010) 19 18-200mm F/3.5-6.3 Di II VC (Model B018) 14 35-150mm F/2.8-4 Di VC OSD (Model A043) 19 18-270mm F/3.5-6.3 Di II VC PZD (Model B008TS) 22 SP 70-200mm F/2.8 Di VC USD G2 (Model A025) 18 18-400mm F/3.5-6.3 Di II VC HLD (Model B028) 23 SP AF70-200mm F/2.8 Di (Model A001) 22 70-210mm F/4 Di VC USD (Model A034) 23 SP 70-300mm F/4-5.6 Di VC USD (Model A030) 23 SP 70-300mm F/4-5.6 Di VC USD (Model A005) Di III series for mirrorless interchangeable-lens cameras 23 AF70-300mm F/4-5.6 Di (Model A17) 24 100-400mm F/4.5-6.3 Di VC USD (Model A035) 20 14-150mm F/3.5-5.8 Di III (Model C001) 25 SP 150-600mm F/5-6.3 Di VC USD G2 (Model A022) 10 17-28mm F/2.8 Di III RXD (Model A046) 25 SP 150-600mm F/5-6.3 Di VC USD (Model A011) 20 18-200mm F/3.5-6.3 Di III VC (Model B011) 08 SP 35mm F/1.4 Di USD (Model F045) 12 28-75mm F/2.8 Di III RXD (Model A036) 26 SP 35mm F/1.8 Di VC USD (Model F012) 26 SP 45mm F/1.8 Di VC USD (Model F013) 26 SP 85mm F/1.8 Di VC USD (Model F016) 27 SP 90mm F/2.8 Di MACRO 1:1 VC USD (Model F017) 27 SP AF90mm F/2.8 Di MACRO 1:1 (Model 272E) TAMRON PHOTO LENSES UNCOVER YOUR CREATIVITY With Tamron’s unique lens portfolio, photographers can use their camera’s entire potential.