Capillary Self-Alignment of Polygonal Chips: a Generalization for the Shift-Restoring Force J
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Framing Cyclic Revolutionary Emergence of Opposing Symbols of Identity Eppur Si Muove: Biomimetic Embedding of N-Tuple Helices in Spherical Polyhedra - /
Alternative view of segmented documents via Kairos 23 October 2017 | Draft Framing Cyclic Revolutionary Emergence of Opposing Symbols of Identity Eppur si muove: Biomimetic embedding of N-tuple helices in spherical polyhedra - / - Introduction Symbolic stars vs Strategic pillars; Polyhedra vs Helices; Logic vs Comprehension? Dynamic bonding patterns in n-tuple helices engendering n-fold rotating symbols Embedding the triple helix in a spherical octahedron Embedding the quadruple helix in a spherical cube Embedding the quintuple helix in a spherical dodecahedron and a Pentagramma Mirificum Embedding six-fold, eight-fold and ten-fold helices in appropriately encircled polyhedra Embedding twelve-fold, eleven-fold, nine-fold and seven-fold helices in appropriately encircled polyhedra Neglected recognition of logical patterns -- especially of opposition Dynamic relationship between polyhedra engendered by circles -- variously implying forms of unity Symbol rotation as dynamic essential to engaging with value-inversion References Introduction The contrast to the geocentric model of the solar system was framed by the Italian mathematician, physicist and philosopher Galileo Galilei (1564-1642). His much-cited phrase, " And yet it moves" (E pur si muove or Eppur si muove) was allegedly pronounced in 1633 when he was forced to recant his claims that the Earth moves around the immovable Sun rather than the converse -- known as the Galileo affair. Such a shift in perspective might usefully inspire the recognition that the stasis attributed so widely to logos and other much-valued cultural and heraldic symbols obscures the manner in which they imply a fundamental cognitive dynamic. Cultural symbols fundamental to the identity of a group might then be understood as variously moving and transforming in ways which currently elude comprehension. -
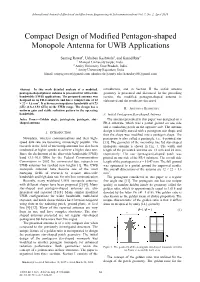
Compact Design of Modified Pentagon-Shaped Monopole Antenna for UWB Applications
International Journal of Electrical and Electronic Engineering & Telecommunications Vol. 7, No. 2, April 2018 Compact Design of Modified Pentagon-shaped Monopole Antenna for UWB Applications Sanyog Rawat1, Ushaben Keshwala2, and Kanad Ray3 1 Manipal University Jaipur, India. 2 Amity University Uttar Pradesh, India. 3 Amity University Rajasthan, India. Email: [email protected]; [email protected]; [email protected] Abstract—In this work detailed analysis of a modified, introduction, and in Section II the initial antenna pentagon-shaped planar antenna is presented for ultra-wide geometry is presented and discussed. In the preceding bandwidth (UWB) applications. The proposed antenna was section, the modified pentagon-shaped antenna is designed on an FR-4 substrate and has a compact size of 12 elaborated and the results are discussed. × 22 × 1.6 mm3. It achieves an impedance bandwidth of 8.73 GHz (3.8–12.53 GHz) in the UWB range. The design has a II. ANTENNA GEOMETRY uniform gain and stable radiation pattern in the operating bandwidth. A. Initial Pentagram Star-shaped Antenna Index Terms—Golden angle, pentagram, pentagon, star- The antenna presented in this paper was designed on a shaped antenna FR-4 substrate, which was a partial ground on one side and a conducting patch on the opposite side. The antenna design is initially started with a pentagram star shape and I. INTRODUCTION then the shape was modified into a pentagon shape. The Nowadays, wireless communications and their high- pentagram is also called a pentangle, i.e., 5-pointed star speed data rate are becoming increasingly popular. The [13]. The geometry of the microstrip line fed star-shaped research in the field of microstrip antennas has also been monopole antenna is shown in Fig. -

Polygrams and Polygons
Poligrams and Polygons THE TRIANGLE The Triangle is the only Lineal Figure into which all surfaces can be reduced, for every Polygon can be divided into Triangles by drawing lines from its angles to its centre. Thus the Triangle is the first and simplest of all Lineal Figures. We refer to the Triad operating in all things, to the 3 Supernal Sephiroth, and to Binah the 3rd Sephirah. Among the Planets it is especially referred to Saturn; and among the Elements to Fire. As the colour of Saturn is black and the Triangle that of Fire, the Black Triangle will represent Saturn, and the Red Fire. The 3 Angles also symbolize the 3 Alchemical Principles of Nature, Mercury, Sulphur, and Salt. As there are 3600 in every great circle, the number of degrees cut off between its angles when inscribed within a Circle will be 120°, the number forming the astrological Trine inscribing the Trine within a circle, that is, reflected from every second point. THE SQUARE The Square is an important lineal figure which naturally represents stability and equilibrium. It includes the idea of surface and superficial measurement. It refers to the Quaternary in all things and to the Tetrad of the Letter of the Holy Name Tetragrammaton operating through the four Elements of Fire, Water, Air, and Earth. It is allotted to Chesed, the 4th Sephirah, and among the Planets it is referred to Jupiter. As representing the 4 Elements it represents their ultimation with the material form. The 4 angles also include the ideas of the 2 extremities of the Horizon, and the 2 extremities of the Median, which latter are usually called the Zenith and the Nadir: also the 4 Cardinal Points. -

Fourth Lecture
Fourth Knowledge Lecture of the New Hermetics The Symbol Of Venus and The Tree Of Life It embraces all ten Sephiroth on the Tree. It is a fitting emblem of the Isis of Nature. Since it contains all the Sephiroth its circle should be made larger then that of Mercury shown in a previous diagram. The Geomantic figures and their Zodiacal Attributions Planets, Colors, Lineal Figures Etc. No. Planet Color Shape Odor 3. Saturn Black Triangle Myrrh 4. Jupiter Blue Square Cedar 5. Mars Red Pentagram Pepper 6. Sun Yellow Hexagram Frankincense 7. Venus Green Septagram Benzoin 8. Mercury Orange Octagram Sandalwood 9. Moon Violet Enneagram Camphor Element Color Odor Fire Red Cinnamon Water Blue Cedar Air Yellow Sandalwood Earth Black Myrrh DIAGRAM 66 The Triangle The first linear shape, associated with the sephirah Binah and the planet Saturn. Medieval sorcerers used triangles to bind spirits because they believed the limiting force of the triangle would confine the spirit. The triangle may be used in any effort to restrict, structure or limit anything. The number three also indicates cycles and therefore time, also a limiting factor appropriate to Saturn. The Square The square is related to Chesed, whose number is four. A square implies the form of a castle or walled structure, society, prestige, rulership and other Jupiterean qualities. The square also symbolizes structure beyond walls, it represents a completion or perfection; a "square deal" and three "square meals" a day illustrate the archetypal idea verbally. Also the four elements working in balanced harmony. The Pentagram The pentagram is the Force of Mars, and the sephira Geburah. -
The Order in Creation in Number and Geometry
THE ORDER IN CREATION IN NUMBER AND GEOMETRY Tontyn Hopman www.adhikara.com/number_and_geometry.html Illustrations by the author 2 About the origin of “The Order in Creation in Number and Geometry”. The author, Frederik (Tontyn) Hopman, was born in Holland in 1914, where he studied to become an architect. At the age of 18, after the death of his father, he had a powerful experience that led to his subsequent study of Oriental esoteric teachings. This was to become a life-long fascination. Responding to the call of the East, at the age of 21, he travelled to India by car. In those days this adventurous journey took many weeks. Once in India he married his travelling companion and settled down in Kashmir, where he lived with his young family for 12 years until in 1947 the invasion from Pakistan forced them to flee. Still in Asia, at the age of 38, Tontyn Hopman had a profound Kundalini awakening that gave his life a new dimension. It was during this awakening that he had a vision of Genesis, which revealed to him the ‘Order in Creation in Number and Geometry’. Around this time, however, Tontyn Hopman decided to return to Europe to enable his children to have a good education and he settled in Switzerland to practise his profession as an architect. Later he occupied himself with astrology and art therapy. Here, in Switzerland, after almost half a century, the memory of his vision came up again, with great clarity. Tontyn Hopman experienced a strong impulse to work on, and present the images that had been dormant for such a long time to the wider public. -
Icons of Mathematics an EXPLORATION of TWENTY KEY IMAGES Claudi Alsina and Roger B
AMS / MAA DOLCIANI MATHEMATICAL EXPOSITIONS VOL 45 Icons of Mathematics AN EXPLORATION OF TWENTY KEY IMAGES Claudi Alsina and Roger B. Nelsen i i “MABK018-FM” — 2011/5/16 — 19:53 — page i — #1 i i 10.1090/dol/045 Icons of Mathematics An Exploration of Twenty Key Images i i i i i i “MABK018-FM” — 2011/5/16 — 19:53 — page ii — #2 i i c 2011 by The Mathematical Association of America (Incorporated) Library of Congress Catalog Card Number 2011923441 Print ISBN 978-0-88385-352-8 Electronic ISBN 978-0-88385-986-5 Printed in the United States of America Current Printing (last digit): 10987654321 i i i i i i “MABK018-FM” — 2011/5/16 — 19:53 — page iii — #3 i i The Dolciani Mathematical Expositions NUMBER FORTY-FIVE Icons of Mathematics An Exploration of Twenty Key Images Claudi Alsina Universitat Politecnica` de Catalunya Roger B. Nelsen Lewis & Clark College Published and Distributed by The Mathematical Association of America i i i i i i “MABK018-FM” — 2011/5/16 — 19:53 — page iv — #4 i i DOLCIANI MATHEMATICAL EXPOSITIONS Committee on Books Frank Farris, Chair Dolciani Mathematical Expositions Editorial Board Underwood Dudley, Editor Jeremy S. Case Rosalie A. Dance Tevian Dray Thomas M. Halverson Patricia B. Humphrey Michael J. McAsey Michael J. Mossinghoff Jonathan Rogness Thomas Q. Sibley i i i i i i “MABK018-FM” — 2011/5/16 — 19:53 — page v — #5 i i The DOLCIANI MATHEMATICAL EXPOSITIONS series of the Mathematical As- sociation of America was established through a generous gift to the Association from Mary P. -

November 8Th 2011
UK SENIOR MATHEMATICAL CHALLENGE November 8th 2011 EXTENDED SOLUTIONS These solutions augment the printed solutions that we send to schools. For convenience, the solutions sent to schools are confined to two sides of A4 paper and therefore in many cases are rather short. The solutions given here have been extended. In some cases we give alternative solutions, and we have included some Extension Problems for further investigations. The Senior Mathematical Challenge (SMC) is a multiple choice contest, in which you are presented with five options, of which just one is correct. It follows that often you can find the correct answers by working backwards from the given alternatives, or by showing that four of them are not correct. This can be a sensible thing to do in the context of the SMC, and we often first give a solution using this approach. However, this does not provide a full mathematical explanation that would be acceptable if you were just given the question without any alternative answers. So for each question we have included a complete solution which does not use the fact that one of the given alternatives is correct. Thus we have aimed to give full solutions with all steps explained. We therefore hope that these solutions can be used as a model for the type of written solution that is expected when presenting a complete solution to a mathematical problem (for example, in the British Mathematical Olympiad and similar competitions). We welcome comments on these solutions, and, especially, corrections or suggestions for improving them. Please send your comments, either by e-mail to: [email protected] or by post to: SMC Solutions, UKMT Maths Challenges Office, School of Mathematics, University of Leeds, Leeds LS2 9JT. -

Wythoffian Skeletal Polyhedra
Wythoffian Skeletal Polyhedra by Abigail Williams B.S. in Mathematics, Bates College M.S. in Mathematics, Northeastern University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Dedication I would like to dedicate this dissertation to my Meme. She has always been my loudest cheerleader and has supported me in all that I have done. Thank you, Meme. ii Abstract of Dissertation Wythoff's construction can be used to generate new polyhedra from the symmetry groups of the regular polyhedra. In this dissertation we examine all polyhedra that can be generated through this construction from the 48 regular polyhedra. We also examine when the construction produces uniform polyhedra and then discuss other methods for finding uniform polyhedra. iii Acknowledgements I would like to start by thanking Professor Schulte for all of the guidance he has provided me over the last few years. He has given me interesting articles to read, provided invaluable commentary on this thesis, had many helpful and insightful discussions with me about my work, and invited me to wonderful conferences. I truly cannot thank him enough for all of his help. I am also very thankful to my committee members for their time and attention. Additionally, I want to thank my family and friends who, for years, have supported me and pretended to care everytime I start talking about math. Finally, I want to thank my husband, Keith. -

The Octagon in Leonardo's Drawings
Mark Reynolds Research 667 Miller Avenue The Octagon in Leonardo’s Drawings Mill Valley, CA 94941 USA [email protected] Abstract. Mark Reynolds presents a study on Leonardo’s abundant use of the octagon in his drawings and architectural renderings. Keywords: Leonardo da Specifically, he focuses on Leonardo’s applications of the octagon: in Vinci, octagons, geometric his studies and sketches of the centralized church, and for which we constructions can find influences specifically from Brunelleschi, as well as from other fifteenth-century architects working with this type of religious structure; in his almost obsessive and frequently repetitious drawing of octagonal shapes and forms in his notebooks throughout his career; in his project for a pavilion while with the Sforzas in the last part of his period in Milan. Also examined are ways to develop the modules to accommodate ¥2 and the T rectangles. The application of the modular units, so far, have been within the square and its gridwork, but as the octagon has traditionally been used in the development of both the circle and the square, this shape is an interesting challenge in terms of linking the two-dimensional surface to the three-dimensional forms we are planning to generate. The object is to provide us with more insight as to why the octagon held so much fascination for Leonardo as one of the ultimate geometric expressions of grandeur and practicality in spatial organization, design, and development. Often in Leonardo’s drawings of octagons, precise geometric constructions were lacking; the master’s approach was freehand. The author seeks to learn if Leonardo’s sketches can be put to the rigors of strict geometric construction, and still be viable as accurate renderings of octagonal geometric spaces with his own geometric constructions of those same spaces. -

Geometry and Art from the Cordovan Proportion
Geometry and Art from the Cordovan Proportion Antonia REDONDO BUITRAGO Departamento de Matemáticas. I.E.S. Bachiller Sabuco Avenida de España, 9 – 02002 Albacete, Spain [email protected] Encarnación REYES IGLESIAS Departamento de Matemática Aplicada. Universidad de Valladolid Avenida Salamanca, s/n – 47014 Valladolid, Spain [email protected] − Abstract: The Cordovan proportion, c=(2 −√2) 1/2 , is the ratio between the radius of the regular octagon and its side length. This proportion was introduced by R. de la Hoz in 1973. Recently, the authors have found geometric properties linked with that proportion, related with a family of shapes named by them, Cordovan poly- gons. These results are summarized and are extended through the works of art of Hashim Cabrera and Luis Calvo, two Cordovan painters who have consciously considered the Cordovan proportion in their recent compositions. In fact, we have checked this ratio in several dissections of the canvases of Cabrera, and looking at the picture of Calvo, we have recognized many of our Cordovan polygons and some new polygons which we have added to our previous collection. We have also discovered some new cordovan dissections of a square, a √2 rectangle and a Silver rectangle . 1. Introduction This work is the result of a meeting of two mathematicians with two painters in Córdoba city in Spain, and its conversations about the Cordovan proportion. − The Cordovan proportion, c=(2 −√2) 1/2 , is the ratio between the ra- dius, R, of the regular octagon and its side length, L, (Figure 1). 2 Fig. 1: Cordovan proportion in the regular octagon This proportion was introduced by the Spanish architect Rafael de la Hoz Arderius in 1973 (Hoz, 1973, 2005) and named by him, Cordo- van proportion . -

26 Mr. A. De Morgan on the Conic Octagram. [April 25, of Them, That 8 Is the Tangential of 4
26 Mr. A. De Morgan on the Conic Octagram. [April 25, of them, that 8 is the tangential of 4. We have here the theorem that the third point of 1 and 7 is also the tangential of 4. Similarly, 10, 11, 13 are each of them (like 8) determined by two constructions ; 14, 16, 17, 19, each of them by three constructions, and so on; the number of constructions increasing by unity for each group of four numbers. And the theorem is, that these constructions, 2, 3 or more, as the case may be, give always one and the same point. Prof. Cayley mentioned that on a large figure of a cubic curve he had, in accordance with the theorem, constructed the series of points 1, 2, 4, 5, 7, 8, 10, 11, 13, 14. Prof. Sylvester made a communication " On the Theory of Re- siduals." Mr. Walker gave a proof of the Rectangle of Forces ; and demon- sti-afcion of tbe principle of the Parallelogram of Forces. These are new and interesting specimens of a class of proofs on the character of which mathematical opinion has been much divided. The interest of these proofs now turns on the question, how much and what there is of a physical character in the assumptions on which they are founded: in fact, what there is to prevent their being purely geometrical, and having a conclusion time of mathematical necessity. April Ihth, 18G7. Prof. SYLVESTER, President, in the Chair. M. Chasles was elected a Foreign Member of the Society. Prof. Clerk-Maxwell, F.R.S., Dr. -

Download Pdf Version
PowerPoint presentation: notes for teachers 2D shape Aims • To provide a set of images to support Key Stage 1 Maths: 2D shape. • To provide students with visual encounters with a variety of objects that use shape as part of their form or decoration. • To provide teachers with an opportunity to build student familiarity in terms of shape vocabulary and identification of shapes in real life contexts. Description • A sequence of 12 slides Teaching ideas • Revise the shape names with your students. Create a list of shape names and then use the objects to play ‘Shape I spy’ and tick them off as you spot them. • Look at the objects and create a tally chart to show how many times you spot different shapes. • Select a particular shape and decide whether it always looks exactly the same on different objects. • Play shape bingo. Ask students to draw a nine square bingo card and draw a different shape (from a list provided by you) in each square. Show the class the images and see who finds all their bingo shapes first. • Use the objects as a starting point for art work using shape – e.g. create a geometric tiled floor design, decorate a pot with lines of different shapes, make a shape necklace. • Print out the images and ask students to annotate them with the shapes they can see on the object. Ask students to find other objects on ‘Explore’ that have shapes on them, print out the image and annotate with the shape names. Use the annotated sheets to make a display.