Active Noise Control: a Tutorial Review
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Deep Learning Approach to Active Noise Control
A Deep Learning Approach to Active Noise Control Hao Zhang1, DeLiang Wang1;2 1Department of Computer Science and Engineering, The Ohio State University, USA 2Center for Cognitive and Brain Sciences, The Ohio State University, USA fzhang.6720, [email protected] Abstract Reference Error Microphone �(�) Microphone �(�) We formulate active noise control (ANC) as a supervised �(�) �(�) �(�) learning problem and propose a deep learning approach, called �(�) deep ANC, to address the nonlinear ANC problem. A convo- lutional recurrent network (CRN) is trained to estimate the real Cancelling Loudspeaker �(�) and imaginary spectrograms of the canceling signal from the reference signal so that the corresponding anti-noise can elimi- ANC nate or attenuate the primary noise in the ANC system. Large- scale multi-condition training is employed to achieve good gen- Figure 1: Diagram of a single-channel feedforward ANC sys- eralization and robustness against a variety of noises. The deep tem, where P (z) and S(z) denote the frequency responses of ANC method can be trained to achieve active noise cancella- primary path and secondary path, respectively. tion no matter whether the reference signal is noise or noisy speech. In addition, a delay-compensated strategy is intro- tional link artificial neural network to handle the nonlinear ef- duced to address the potential latency problem of ANC sys- fect in ANC. Other nonlinear adaptive models such as radial tems. Experimental results show that the proposed method is basis function networks [12], fuzzy neural networks [13], and effective for wide-band noise reduction and generalizes well to recurrent neural networks [14] have been developed to further untrained noises. -

Active Noise Control in a Three-Dimensional Space Jihe Yang Iowa State University
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 1994 Active noise control in a three-dimensional space Jihe Yang Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Acoustics, Dynamics, and Controls Commons, and the Physics Commons Recommended Citation Yang, Jihe, "Active noise control in a three-dimensional space " (1994). Retrospective Theses and Dissertations. 10660. https://lib.dr.iastate.edu/rtd/10660 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. U'M'I MICROFILMED 1994 INFORMATION TO USERS This manuscript has been reproduced from the microfilm master. UMI films the text directly from the original or copy submitted. Thus, some thesis and dissertation copies are in typewriter face, while others may be from any type of computer printer. The quality of this reproduction is dependent upon the quality of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleedthrough, substandard margins, and improper alignment can adversely affect reproduction. In the unlikely event that the author did not send UMI a complete manuscript and there are missing pages, these vrill be noted. Also, if unauthorized copyright material had to be removed, a note will indicate the deletion. Oversize materials (e.g., maps, drawings, charts) are reproduced by sectioning the original, beginning at the upper left-hand comer and continuing from left to right in equal sections with small overlaps. -

Active Noise Control Over Space: a Subspace Method for Performance Analysis
applied sciences Article Active Noise Control over Space: A Subspace Method for Performance Analysis Jihui Zhang 1,* , Thushara D. Abhayapala 1 , Wen Zhang 1,2 and Prasanga N. Samarasinghe 1 1 Audio & Acoustic Signal Processing Group, College of Engineering and Computer Science, Australian National University, Canberra 2601, Australia; [email protected] (T.D.A.); [email protected] (W.Z.); [email protected] (P.N.S.) 2 Center of Intelligent Acoustics and Immersive Communications, School of Marine Science and Technology, Northwestern Polytechnical University, Xi0an 710072, China * Correspondence: [email protected] Received: 28 February 2019; Accepted: 20 March 2019; Published: 25 March 2019 Abstract: In this paper, we investigate the maximum active noise control performance over a three-dimensional (3-D) spatial space, for a given set of secondary sources in a particular environment. We first formulate the spatial active noise control (ANC) problem in a 3-D room. Then we discuss a wave-domain least squares method by matching the secondary noise field to the primary noise field in the wave domain. Furthermore, we extract the subspace from wave-domain coefficients of the secondary paths and propose a subspace method by matching the secondary noise field to the projection of primary noise field in the subspace. Simulation results demonstrate the effectiveness of the proposed algorithms by comparison between the wave-domain least squares method and the subspace method, more specifically the energy of the loudspeaker driving signals, noise reduction inside the region, and residual noise field outside the region. We also investigate the ANC performance under different loudspeaker configurations and noise source positions. -
Frequency Domain Active Noise Control with Ultrasonic Tracking Thomas Chapin Waite Iowa State University
Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2010 Frequency Domain Active Noise Control with Ultrasonic Tracking Thomas Chapin Waite Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Part of the Mechanical Engineering Commons Recommended Citation Waite, Thomas Chapin, "Frequency Domain Active Noise Control with Ultrasonic Tracking" (2010). Graduate Theses and Dissertations. 11782. https://lib.dr.iastate.edu/etd/11782 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Frequency domain active noise control with ultrasonic tracking by Tom Waite A dissertation submitted to the graduate faculty in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Major: Mechanical Engineering Program of Study Committee: Atul G. Kelkar, Major Professor Julie A. Dickerson J. Adin Mann III Jerald M. Vogel Qingze Zou Iowa State University Ames, Iowa 2010 Copyright c Tom Waite, 2010. All rights reserved. ii TABLE OF CONTENTS LIST OF FIGURES . v ACKNOWLEDGEMENTS . xi ABSTRACT . xii CHAPTER 1. INTRODUCTION . 1 1.1 Background . 1 1.1.1 Frequency Domain ANC . 5 1.1.2 Ultrasonic Tracking . 7 1.2 Outline . 8 CHAPTER 2. ULTRASONIC TRACKING . 11 2.1 Introduction . 11 2.2 Localization . 11 2.2.1 Bandwidth Considerations . 16 2.3 Error . 18 2.3.1 Sources of Incorrect Solutions . -
Noise and Vibration Control in the Built Environment
applied sciences Noise and Vibration Control in the Built Environment Edited by Jian Kang Printed Edition of the Special Issue Published in Applied Sciences www.mdpi.com/journal/applsci Noise and Vibration Control in the Built Environment Special Issue Editor Jian Kang Special Issue Editor Jian Kang University of Sheffield UK Editorial Office MDPI AG St. Alban-Anlage 66 Basel, Switzerland This edition is a reprint of the Special Issue published online in the open access journal Applied Sciences (ISSN 2076-3417) from 2016–2017 (available at: http://www.mdpi.com/journal/applsci/special_issues/vibration_control). For citation purposes, cite each article independently as indicated on the article page online and as indicated below: Author 1; Author 2; Author 3 etc. Article title. Journal Name. Year. Article number/page range. ISBN 978-3-03842-420-8 (Pbk) ISBN 978-3-03842-421-5 (PDF) Articles in this volume are Open Access and distributed under the Creative Commons Attribution license (CC BY), which allows users to download, copy and build upon published articles even for commercial purposes, as long as the author and publisher are properly credited, which ensures maximum dissemination and a wider impact of our publications. The book taken as a whole is © 2017 MDPI, Basel, Switzerland, distributed under the terms and conditions of the Creative Commons license CC BY-NC-ND (http://creativecommons.org/licenses/by-nc-nd/4.0/). Table of Contents About the Guest Editor .............................................................................................................................. v Preface to “Noise and Vibration Control in the Built Environment” ................................................... vii Chapter 1: Urban Sound Environment and Soundscape Francesco Aletta, Federica Lepore, Eirini Kostara-Konstantinou, Jian Kang and Arianna Astolfi An Experimental Study on the Influence of Soundscapes on People’s Behaviour in an Open Public Space Reprinted from: Appl. -

Noise Reduction Through Active Noise Control Using Stereophonic Sound for Increasing Quite Zone
Noise reduction through active noise control using stereophonic sound for increasing quite zone Dongki Min1; Junjong Kim2; Sangwon Nam3; Junhong Park4 1,2,3,4 Hanyang University, Korea ABSTRACT The low frequency impact noise generated during machine operation is difficult to control by conventional active noise control. The Active Noise Control (ANC) is a destructive interference technic of noise source and control sound by generating anti-phase control sound. Its efficiency is limited to small space near the error microphones. At different locations, the noise level may increase due to control sounds. In this study, the ANC method using stereophonic sound was investigated to reduce interior low frequency noise and increase the quite zone. The Distance Based Amplitude Panning (DBAP) algorithm based on the distance between the virtual sound source and the speaker was used to create a virtual sound source by adjusting the volume proportions of multi speakers respectively. The 3-Dimensional sound ANC system was able to change the position of virtual control source using DBAP algorithm. The quiet zone was formed using fixed multi speaker system for various locations of noise sources. Keywords: Active noise control, stereophonic sound I-INCE Classification of Subjects Number(s): 38.2 1. INTRODUCTION The noise reduction is a main issue according to improvement of living condition. There are passive and active control methods for noise reduction. The passive noise control uses sound absorption material which has efficiency about high frequency. The Active Noise Control (ANC) which is the method for generating anti phase control sound is able to reduce low frequency. -

Multi-Channel Active Noise Control for All Uncertain Primary and Secondary Paths
Multi-channel Active Noise Control for All Uncertain Primary and Secondary Paths Yuhsuke Ohta and Akira Sano Department of System Design Engineering, Keio University, 3-14-1 Hiyoshi, Kohoku-ku, Yokohama 223-8522, Japan Abstract filter matrices in an on-line manner, which enables the noise cancellation at the objective points. Unlike the pre- Fully adaptive feedforward control algorithm is proposed vious indirect approaches based on the explicit on-line for general multi-channel active noise control (ANC) identification, neither dither sounds nor the PE property when all the noise transmission channels are uncertain. of the source noises are required in the proposed scheme. To reduce the actual canceling error, two kinds of virtual errors are introduced and are forced into zero by adjusting 2. Feedforward Adaptive Active Noise Control three adaptive FIR filter matrices in an on-line manner, which can result in the canceling at the objective points. Primary Reference Secondary Error Noise Microphones Sources Microphones Unlike other conventional approaches, the proposed algo- Sources G (z) rithm does not need exact identification of the secondary 1 e1 (k) paths, and so requires neither any dither signals nor the v1(k) s1 (k) PE property of the source noises, which is a great advan- r1(k) G (z) tage of the proposed adaptive approach. 3 G2 (z) G4 (z) s(k) 1. Introduction vN (k) c e (k) Nc s (k) Ns r (k) Active noise control (ANC) is efficiently used to sup- Nr press unwanted low frequency noises generated from pri- mary sources by emitting artificial secondary sounds to u(k) r(k) Adaptice Active objective points [1][2]. -

Newport Beach, California
47th International Congress and Exposition on Noise Control Engineering (INTERNOISE 2018) Impact of Noise Control Engineering Chicago, Illinois, USA 26 - 29 August 2018 Volume 1 of 10 ISBN: 978-1-5108-7303-2 Printed from e-media with permission by: Curran Associates, Inc. 57 Morehouse Lane Red Hook, NY 12571 Some format issues inherent in the e-media version may also appear in this print version. Copyright© (2018) by Institute of Noise Control Engineering - USA (INCE-USA) All rights reserved. Printed by Curran Associates, Inc. (2018) For permission requests, please contact Institute of Noise Control Engineering - USA (INCE-USA) at the address below. Institute of Noise Control Engineering - USA (INCE-USA) INCE-USA Business Office 11130 Sunrise Valley Drive Suite 350 Reston, VA 20190 USA Phone: +1 703 234 4124 Fax: +1 703 435 4390 [email protected] Additional copies of this publication are available from: Curran Associates, Inc. 57 Morehouse Lane Red Hook, NY 12571 USA Phone: 845-758-0400 Fax: 845-758-2633 Email: [email protected] Web: www.proceedings.com INTER-NOISE 2018 – Pleanary, Keynote and Technical Sessions Papers are listed by Day, Morning/Afternoon, Session Number and Order of Presentation Select the underlined text (in18_xxxx.pdf) to link to paper Papers without links are available from the American Society of Mechanical Engineers (ASME) - Noise Control and Acoustics Division (NCAD) Sunday – 26 August, 2018 Opening Plenary: Barry Marshall Gibbs Session Chair: Stuart Bolton, Room: Chicago D and E 16:00 in18_4002.pdf Structure-Borne Sound in Buildings: Application of Vibro-Acoustic Methods for Measurement and Prediction .....1 Barry Marshall Gibbs, University of Liverpool Monday Morning – 27 August, 2018 Keynote: Jean-Louis Guyader Session Chair: Steffen Marburg Room: Chicago D 08:00 in18_5001.pdf Building Optimal Vibro-Acoustics Models From Measured Responses .....26 Jean-Louis Guyader, LVA/INSA de Lyon; Michael Ruzek, LAMCOS INSA de Lyon; Charles Pezerat, LAUM Universite du Maine Keynote: Amiya R. -
Ultra-Broadband Local Active Noise Control with Remote Acoustic Sensing
www.nature.com/scientificreports OPEN Ultra‑broadband local active noise control with remote acoustic sensing Tong Xiao *, Xiaojun Qiu & Benjamin Halkon One enduring challenge for controlling high frequency sound in local active noise control (ANC) systems is to obtain the acoustic signal at the specifc location to be controlled. In some applications such as in ANC headrest systems, it is not practical to install error microphones in a person’s ears to provide the user a quiet or optimally acoustically controlled environment. Many virtual error sensing approaches have been proposed to estimate the acoustic signal remotely with the current state‑ of‑the‑art method using an array of four microphones and a head tracking system to yield sound reduction up to 1 kHz for a single sound source. In the work reported in this paper, a novel approach of incorporating remote acoustic sensing using a laser Doppler vibrometer into an ANC headrest system is investigated. In this “virtual ANC headphone” system, a lightweight retro‑refective membrane pick‑up is mounted in each synthetic ear of a head and torso simulator to determine the sound in the ear in real‑time with minimal invasiveness. The membrane design and the efects of its location on the system performance are explored, the noise spectra in the ears without and with ANC for a variety of relevant primary sound felds are reported, and the performance of the system during head movements is demonstrated. The test results show that at least 10 dB sound attenuation can be realised in the ears over an extended frequency range (from 500 Hz to 6 kHz) under a complex sound feld and for several common types of synthesised environmental noise, even in the presence of head motion. -

Active Noise Control System Based on the Improved Equation Error Model
acoustics Article Active Noise Control System Based on the Improved Equation Error Model Jun Yuan 1, Jun Li 1, Anfu Zhang 2, Xiangdong Zhang 2,* and Jia Ran 3,* 1 Department of Microelectronics Engineering, Chongqing University of Posts and Telecommunications, Chongqing 400065, China; [email protected] (J.Y.); [email protected] (J.L.) 2 Wuhan Second Ship Design and Research Institute, Wuhan 430064, China; [email protected] 3 Department of Electromagnetic Field and Wireless, Chongqing University of Posts and Telecommunications, Chongqing 400065, China * Correspondence: [email protected] (X.Z.); [email protected] (J.R.) Abstract: This paper presents an algorithm structure for an active noise control (ANC) system based on an improved equation error (EE) model that employs the offline secondary path modeling method. The noise of a compressor in a gas station is taken as an example to verify the performance of the proposed ANC system. The results show that the proposed ANC system improves the noise reduction performance and convergence speed compared with other typical ANC systems. In particular, it achieves 28 dBA noise attenuation at a frequency of about 250 Hz and a mean square error (MSE) of about −20 dB. Keywords: active noise control; improved equation error; mean square error 1. Introduction Citation: Yuan, J.; Li, J.; Zhang, A.; Zhang, X.; Ran, J. Active Noise In order to reduce acoustic noise in workplaces and living environments, passive Control System Based on the and active approaches [1] have been employed. For passive approaches, the energy of the Improved Equation Error Model. noise is absorbed by dampers, barriers, mufflers, or sonic crystals [1–4]. -
Active Noise and Vibration Control - Smart Structures 98-001
" Active Noise and Vibration Control - Smart Structures 98-001 Active Noise and Vibration Control 1. Objectives 2. Background 1. Active Noise Control 2. Active Vibration Control (A VC) 3. Importance 4. Alternatives 5. Maturity and Risk 1. Maturity of Technology 1. Noise Cancellation Headsets (Commercial) 2. Active Muffler or Silencer (prototype) 3. Noise Reduction in Ducts (Commercial) 4. Vehicles (Developmental and Commercial) 5. Turboprop Aircraft (Developmental) 6. Transformers (Commercial) 7. Noise Reduction in Engines (Commercial) 8. Precision Machining (Developmental and Commercial) 9. Active Strut Member (Developmental) 10. Active Suspension (Developmental and Commercial) 11. Airframe Vibration Control (Developmental) 12. Flutter Control (Developmental) 6. Technological Risks 7. Availability 8. Breadth of Application 9. Cost-Benefit Analysis 10. References Page 1 Active Noise and Vibration Control- Smart Structures 98-001 Active Noise and Vibration Control 1. Objectives Active Noise and Vibration Systems have the following objectives: • To improve passenger comfort and crew effectiveness by reducing cabin and cockpit noise and vibration levels. Currently, pilot flying times are limited by exposure to noise and vibrations in turboprop and helicopter aircraft. Future workplace health and safety regulations will establish more rigid standards for exposure to cabin noise. • To increase the performance characteristics of commercial and military aircraft by reducing vibration levels. Operational performance, manoeuvrability and fuel efficiencies are expected to increase with active vibration control of aircraft structures which are exposed to high levels of turbulence and buffet loads creating wing flutter, acoustic resonance in open bomb bays, rotor resonances and fuselage vibrations. • To increase the lifetime of aircraft and improve component life cyclc costs by decreasing fatigue loading which is produced by noise and vibration. -
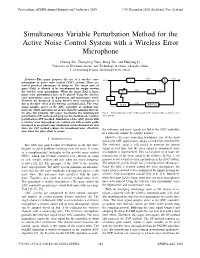
Simultaneous Variable Perturbation Method for the Active Noise Control System with a Wireless Error Microphone
Proceedings, APSIPA Annual Summit and Conference 2020 7-10 December 2020, Auckland, New Zealand Simultaneous Variable Perturbation Method for the Active Noise Control System with a Wireless Error Microphone Chuang Shi, Zhongxing Yuan, Rong Xie, and Huiyong Li University of Electronic Science and Technology of China, Chengdu, China Corresponding E-mail: [email protected] d() n e() n Abstract—This paper proposes the use of a wireless error x() n P microphone in active noise control (ANC) systems. There are + several practical advantages of doing so. The target zone of + quiet (ZoQ) is allowed to be reconfigured by simply moving y() n y'( n ) the wireless error microphone. When the target ZoQ is large, W S many error microphones have to be placed. Using the wireless error microphone eases the deployment and maintenance work. S However, the drawback of using wireless error microphones is e'( n ) due to the jitter effect of the wireless communication. The error NLMS Wireless signal samples arrive at the ANC controller at random time r() n intervals, which sometimes are greater than the sampling interval. To solve this problem, this paper investigates the simultaneous Fig. 1. Block diagram of the feedforward ANC system with a wireless error perturbation (SP) method and proposes the simultaneous variable microphone. perturbation (SVP) method. Simulations of the ANC system with a wireless error microphone are carried out with acoustic paths measured in an actual setup. Simulation results demonstrate that when the SVP method reduces the broadband noise effectively the reference and error signals are fed to the ANC controller even when the jitter effect is severe.