Plate Tectonic Raster Reconstruction in Gplates
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Caltech, Tectonics Observatory University of Sydney, School of Geosciences the Geological Survey of Norway
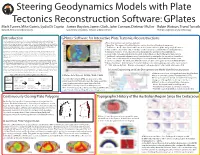
Steering Geodynamics Models with Plate Tectonics Reconstruction Software: GPlates Mark Turner, Mike Gurnis, Lydia Di Caprio James Boyden, James Clark, John Cannon, Dietmar Muller Robin Watson, Trond Torsvik Caltech, Tectonics Observatory University of Sydney, School of Geosciences The Geological Survey of Norway Introduction GPlates: Software for Interactive Plate Tectonics Reconstructions One of our goals is to attempt to place the tectonics of individual boundaries within a global context, and to understand the broader scale forces driving the deformation. There are a host of unsolved GPlates main window user interface elements: questions surrounding the causes for changes in plate motions, including the initiation of new subduction zones. In order to address these question, the TO has been developing an entirely new generation of tools 1 Menu Bar - This region of the Main Window contains the titles of the drop down menus. that are computationally advanced while being consistent with the actual structure and kinematics of 2 Tool Palette - A collection of tools which are used to interact with the globe and geological features. plate boundaries. Thus far, we have made considerable progress in this direction. 3 Time Controls - A collection of user-interface controls for precise control of the reconstruction time. One goal is to assimilate plate tectonic reconstructions into global and regional geodynamic models. 4 Animation Controls - A collection of tools to manipulate the animation of reconstructions. With the University of Sydney in Australia and the Geological Survey of Norway, the TO has been a key partner in the development of GPlates, a plate tectonic reconstruction software package. We are using 5 Zoom Slider - A mouse-controlled slider which controls the zoom level of the Globe View camera. -

Free Zip Software for Linux
Free zip software for linux LINUX FILE COMPRESSION SOFTWARE. PEAZIP FOR LINUX X DOWNLOAD NOTES. PeaZip is an Open Source (LGPLv3) cross platform archiver and file compression software, manage extraction of over archive types including mainstream formats like.7z,.arc,.bz2, ace,.cab,.gz,.iso. While most Linux veterans would tell you the command line is all Price: Free Supports packing of 7z, ARC, BZ2, GZ, *PAQ, PEA, QUAD/BALZ, TAR, UPX, WIM, XZ, ZIP, and unpacking of over different archive types. 7-Zip is a file archiver with a high compression ratio. Download 7-Zip is open source software. There is a port of the command line version to Linux/Unix. Download 7-Zip beta () for Windows: p7zip is the command line version of 7-Zip for Linux / Unix, made by an independent developer. Password detection and protection is automatic for arj, zip and rar files. Ark is an archiving tool for the KDE desktop environment that is included file archivers for Linux that I fail to include on my list above, feel free to share. In this article we will discuss top 15 utilities in Linux available for users. Lzma is compression tool like zip or tar, but it perform quick in comparison to bzip. WinRAR supports all popular compression formats (RAR, ZIP, CAB, ARJ, The program can be used absolutely free of charge for 40 days! Asked by Yamir via e-mail. Question: MS-Windows has winzip program. I cannot find anything under Application menu to zip or unzip files on. Most friendly and simple software to open zip files and rar files for Linux. -

Plate Tectonic Reconstructions with Continuously Closing Plates$
Computers & Geosciences 38 (2012) 35–42 Contents lists available at ScienceDirect Computers & Geosciences journal homepage: www.elsevier.com/locate/cageo Plate tectonic reconstructions with continuously closing plates$ Michael Gurnis a,n, Mark Turner a, Sabin Zahirovic b, Lydia DiCaprio a,b,1, Sonja Spasojevic a, R.Dietmar Muller¨ b, James Boyden b, Maria Seton b, Vlad Constantin Manea a,2, Dan J. Bower a a Seismological Laboratory, California Institute of Technology, Pasadena, CA 91125, USA b EarthByte Group, School of Geosciences, The University of Sydney, Sydney, NSW 2006, Australia article info abstract Article history: We present a new algorithm for modeling a self-consistent set of global plate polygons. Each plate Received 9 December 2010 polygon is composed of a finite list of plate margins, all with different Euler poles. We introduce a Received in revised form ’’continuously closed plate’’ (CCP), such that, as each margin moves independently, the plate polygon 18 April 2011 remains closed geometrically as a function of time. This method solves emerging needs in computa- Accepted 20 April 2011 tional geodynamics to combine kinematic with dynamic models. Because they have polygons that are Available online 11 May 2011 too widely spaced in time and have inconsistent motions between margins and plates, traditional Keywords: global plate tectonic reconstructions have become inadequate for geodynamics. The CCP algorithm has Geodynamics been incorporated into the GPlates open-source paleogeographic system. The algorithm is a set of Plate tectonics procedures and data structures that operate on collections of reconstructed geometric data to form closed plate polygons; the main data structures used for each plate polygon are based on a nested hierarchy of topological elements. -

B-1 B. Summary: Support for the Generic Mapping Tools The
B-1 B. Summary: Support for the Generic Mapping Tools The Generic Mapping Tools (GMT) has served marine scientists for almost 25 years. Thousands of federally funded US scientists have been trained to use GMT, count on GMT for their day-to-day research productivity, and expect rapid responses to their inquiries about bugs, updates, new features, installation, or general usage. GMT’s power to process data and produce publication-quality graphics has made it a de facto standard for a large segment of geoscientists, often in combination with other open- source (e.g., Python) or commercial (e.g., MATLAB®) tools. GMT is a UNIX command-line tool set but developers can now design new tools using the GMT5 C/C++ Application Program Interface (API). Two such prototypes are the GMT/MATLAB API (funded by NSF/OCE/MGG) and an in-development GMT/Python API (funded by NSF/EAR/Geoinformatics). The intertwined use of GMT, MATLAB® and Python encapsulates the working environment of a large group of marine geoscientists. A cost/benefit analysis of the GMT enterprise will reveal that it is very frugal compared to other comparable national and international geoscience software projects. For instance, the Australia-US-Norway collaborative GPlates project is ~10 years old and has so far cost Australian tax payers A$2 million, with comparable costs among their US and Norwegian partners. In contrast, GMT has cost less than US $1 million spread over 25 years and our customer base is almost a magnitude larger. Furthermore, international volunteers contribute an inordinate amount of time and expertise to improve GMT at no salary cost to NSF. -

Gplates User Manual
GPlates User Manual Table of Contents 1. Introduction to GPlates 1.1. The Aim of this Manual 1.2. Introducing GPlates 1.3. GPlates Development 1.4. Further Information 2. Introducing The Main Window 2.1. The Main Window 2.2. Reconstruction View 2.3. The Menu Bar 2.4. Tool Palette 2.5. List of Menu Operations 3. Data File Types 3.1. Introduction 3.2. Rasters in GPlates 3.3. Time-Dependent Raster Sets 4. Loading And Saving 4.1. Introducing Feature Collections 4.2. How to Load a File 4.3. The Manage Feature Collections Dialog 4.4. File Errors 4.5. Unsaved Changes 5. Controlling The View 5.1. Reconstruction View 5.2. Tool Palette 5.3. View Menu 5.4. Window Menu 5.5. Manage Colouring 6. Layers 6.1. Introduction 6.2. Layers in GPlates 6.3. What’s the difference between a layer and a file? 6.4. The Layers dialog 6.5. Creating layers 6.6. Types of layers 7. Reconstructions 7.1. Introduction 7.2. Main Window Interface Components 7.3. Reconstruction Menu 7.4. Animations 8. Export 8.1. Introduction 8.2. Export dialog 8.3. "Add Export" dialog 8.4. Export Items 8.5. File name template 9. Interacting With Features 9.1. Tools for Interacting with Features 9.2. Choose Feature Tool 9.3. Features Menu 10. More on Reconstructions 10.1. Theory 10.2. Specify Anchored Plate ID 10.3. Reconstruction Pole Dialog 11. Editing Geometries 11.1. Geometries in GPlates 11.2. Geometry-Editing Tools 11.3. -

Next-Generation Plate-Tectonic Reconstructions Using Gplates James A
C:/ITOOLS/WMS/CUP-NEW/2476231/WORKINGFOLDER/KKE/9780521897150C07.3D 95 [95–114] 10.1.2011 9:06PM 7 Next-generation plate-tectonic reconstructions using GPlates james a. boyden, r. dietmar mu¨ ller, michael gurnis, trond h. torsvik, james a. clark, mark turner, hamish ivey-law, robin j. watson, and john s. cannon 7.1 Introduction Plate tectonics is the kinematic theory that describes the large-scale motions and events of the outermost shell of the solid Earth in terms of the relative motions and interactions of large, rigid, interlocking fragments of lithosphere called tectonic plates. Plates form and disappear incrementally over time as a result of tectonic processes. There are currently about a dozen major plates on the surface of the Earth, and many minor ones. The present-day configuration of tectonic plates is illustrated in Figure 7.1. As the interlocking plates move relative to each other, they interact at plate boundaries, where adjacent plates collide, diverge or slide past each other. The interactions of plates result in a variety of observable surface phenomena, including the occurrence of earthquakes and the formation of large-scale surface features such as mountains, sedimentary basins, volcanoes, island arcs and deep ocean trenches. In turn, the appearance of these phenomena and surface features indicate the location of plate boundaries. For a detailed review of the theory of plate tectonics, consult (Wessel and Müller, 2007). A plate-tectonic reconstruction is the calculation of positions and orientations of tectonic plates at an instant in the history of the Earth. The visualization of reconstruc- tions is a valuable tool for understanding the evolution of the systems and processes of the Earth’s surface and near subsurface. -

FLOSS in the Geological Sciences
Update to „Using Free/Libre and Open Source Software in the Geological Sciences“ This is an updated list of FLOSS that might be useful in the geological sciences. The original list was published in our article in the Austrian Journal of Earth Sciences: Mader, D., Schenk, B. (2017) Using Free/Libre and Open Source Software in the Geological Sciences. Communication of the Society. Austrian Journal of Earth Sciences 110/1, 133-152. http://dx.doi.org/10.17738/ajes.2017.0010 That article has no active hyperlinks, and as the tables are images the presented links can also not copied and pasted out of the online pdf-version. Thus, this addendum lists again all the links of the article for easier access. In addition to the existing categories we list here also FLOSS and scripts which depends on prorietary software (e.g., Excel, Matlab). Currently, we do not collect information about apps for mobile devices. We still focus on the usage of desktop applications in offices. This addendum will be updated from time to time as always new interesting software is created. The selection is, however, a subjective one and should never be regarded as a complete compilation of all available software. We just intend to show the variety of available interesting Free/Libre and Open Source Software for the Geological Sciences. Contrary to the article in AJES we do not indicate on which platforms the listed software will work – this information is given on the individual websites or articles about the programs. Table of contents Alternative software of usually mostly -

Author's Personal Copy
Author's personal copy Computers & Geosciences 38 (2012) 35–42 Contents lists available at ScienceDirect Computers & Geosciences journal homepage: www.elsevier.com/locate/cageo Plate tectonic reconstructions with continuously closing plates$ Michael Gurnis a,n, Mark Turner a, Sabin Zahirovic b, Lydia DiCaprio a,b,1, Sonja Spasojevic a, R.Dietmar Muller¨ b, James Boyden b, Maria Seton b, Vlad Constantin Manea a,2, Dan J. Bower a a Seismological Laboratory, California Institute of Technology, Pasadena, CA 91125, USA b EarthByte Group, School of Geosciences, The University of Sydney, Sydney, NSW 2006, Australia article info abstract Article history: We present a new algorithm for modeling a self-consistent set of global plate polygons. Each plate Received 9 December 2010 polygon is composed of a finite list of plate margins, all with different Euler poles. We introduce a Received in revised form ’’continuously closed plate’’ (CCP), such that, as each margin moves independently, the plate polygon 18 April 2011 remains closed geometrically as a function of time. This method solves emerging needs in computa- Accepted 20 April 2011 tional geodynamics to combine kinematic with dynamic models. Because they have polygons that are Available online 11 May 2011 too widely spaced in time and have inconsistent motions between margins and plates, traditional Keywords: global plate tectonic reconstructions have become inadequate for geodynamics. The CCP algorithm has Geodynamics been incorporated into the GPlates open-source paleogeographic system. The algorithm is a set of Plate tectonics procedures and data structures that operate on collections of reconstructed geometric data to form closed plate polygons; the main data structures used for each plate polygon are based on a nested hierarchy of topological elements. -
Next-Generation Plate-Tectonic Reconsttuctions Using Gplates
7 Next-generation plate-tectonic reconsttuctions using GPlates JAMES A. BOYDEN, R. DIETMAR MULLER, MICHAEL GURNIS, TROND H. TORSVIK, JAMES A. CLARK, MARK TURNER, HAMISH IVEY-LA \V, ROBIN J. \VATSON, AND JOHN S. CANNON 7.1 Introduction Plate tectonics is the kinematic theory that describes the large-scale n1otions and events of the outermost shell of the solid Earth in terms of the relative motions and interactions of large, rigid, interlocking fragments of lithosphere called tectonic plates. Plates fo1m and disappear incrementally over tin1e as a result of tectonic processes. There arc cun·ently about a dozen n1ajor plates on the surface of the Earth, and 1nany tninor ones. The present-day configuration of tectonic plates is illustrated in Figure 7 .1. As the interlocking plates •nove relative to each other, they interact at plate boundaries, where adjacent plates collide, diverge, or slide past each other. The interactions of plates result in a variety of observable surface phenomena, including the occurrence of earthquakes and the formation of large-scale surface features such as mountains, sedimentary basins, volcanoes, island arcs, and deep ocean trenches. In tum, the appearance of these phenon1ena and surface features indicates the location of plate boundaries. For a detailed review of the theory of plate tectonics, consult Wessel and Muller (2007). A plate-tectonic reconstruction is the calculation of positions and orientations of tectonic plates at an instant in the history of the Earth. The visualization of reconstruc tions is a valuable tool for understanding the evolution of the systems and processes of the Earth's surface and near subsurface.