Next-Generation Plate-Tectonic Reconsttuctions Using Gplates
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Kinematic Reconstruction of the Caribbean Region Since the Early Jurassic
Earth-Science Reviews 138 (2014) 102–136 Contents lists available at ScienceDirect Earth-Science Reviews journal homepage: www.elsevier.com/locate/earscirev Kinematic reconstruction of the Caribbean region since the Early Jurassic Lydian M. Boschman a,⁎, Douwe J.J. van Hinsbergen a, Trond H. Torsvik b,c,d, Wim Spakman a,b, James L. Pindell e,f a Department of Earth Sciences, Utrecht University, Budapestlaan 4, 3584 CD Utrecht, The Netherlands b Center for Earth Evolution and Dynamics (CEED), University of Oslo, Sem Sælands vei 24, NO-0316 Oslo, Norway c Center for Geodynamics, Geological Survey of Norway (NGU), Leiv Eirikssons vei 39, 7491 Trondheim, Norway d School of Geosciences, University of the Witwatersrand, WITS 2050 Johannesburg, South Africa e Tectonic Analysis Ltd., Chestnut House, Duncton, West Sussex, GU28 OLH, England, UK f School of Earth and Ocean Sciences, Cardiff University, Park Place, Cardiff CF10 3YE, UK article info abstract Article history: The Caribbean oceanic crust was formed west of the North and South American continents, probably from Late Received 4 December 2013 Jurassic through Early Cretaceous time. Its subsequent evolution has resulted from a complex tectonic history Accepted 9 August 2014 governed by the interplay of the North American, South American and (Paleo-)Pacific plates. During its entire Available online 23 August 2014 tectonic evolution, the Caribbean plate was largely surrounded by subduction and transform boundaries, and the oceanic crust has been overlain by the Caribbean Large Igneous Province (CLIP) since ~90 Ma. The consequent Keywords: absence of passive margins and measurable marine magnetic anomalies hampers a quantitative integration into GPlates Apparent Polar Wander Path the global circuit of plate motions. -

Playing Jigsaw with Large Igneous Provinces a Plate Tectonic
PUBLICATIONS Geochemistry, Geophysics, Geosystems RESEARCH ARTICLE Playing jigsaw with Large Igneous Provinces—A plate tectonic 10.1002/2015GC006036 reconstruction of Ontong Java Nui, West Pacific Key Points: Katharina Hochmuth1, Karsten Gohl1, and Gabriele Uenzelmann-Neben1 New plate kinematic reconstruction of the western Pacific during the 1Alfred-Wegener-Institut Helmholtz-Zentrum fur€ Polar- und Meeresforschung, Bremerhaven, Germany Cretaceous Detailed breakup scenario of the ‘‘Super’’-Large Igneous Province Abstract The three largest Large Igneous Provinces (LIP) of the western Pacific—Ontong Java, Manihiki, Ontong Java Nui Ontong Java Nui ‘‘Super’’-Large and Hikurangi Plateaus—were emplaced during the Cretaceous Normal Superchron and show strong simi- Igneous Province as result of larities in their geochemistry and petrology. The plate tectonic relationship between those LIPs, herein plume-ridge interaction referred to as Ontong Java Nui, is uncertain, but a joined emplacement was proposed by Taylor (2006). Since this hypothesis is still highly debated and struggles to explain features such as the strong differences Correspondence to: in crustal thickness between the different plateaus, we revisited the joined emplacement of Ontong Java K. Hochmuth, [email protected] Nui in light of new data from the Manihiki Plateau. By evaluating seismic refraction/wide-angle reflection data along with seismic reflection records of the margins of the proposed ‘‘Super’’-LIP, a detailed scenario Citation: for the emplacement and the initial phase of breakup has been developed. The LIP is a result of an interac- Hochmuth, K., K. Gohl, and tion of the arriving plume head with the Phoenix-Pacific spreading ridge in the Early Cretaceous. The G. -

7 X 11 Long.P65
Cambridge University Press 978-0-521-74583-3 - Structural Geology: An Introduction to Geometrical Techniques, Fourth Edition Donal M. Ragan Frontmatter More information STRUCTURAL GEOLOGY An Introduction to Geometrical Techniques fourth edition Many textbooks describe information and theories about the Earth without training students to utilize real data to answer basic geological questions. This volume – a combi- nation of text and lab book – presents an entirely different approach to structural geology. Designed for undergraduate laboratory classes, it is dedicated to helping students solve many of the geometrical problems that arise from field observations. The basic approach is to supply step-by-step instructions to guide students through the methods, which include well-established techniques as well as more cutting-edge approaches. Particular emphasis is given to graphical methods and visualization techniques, intended to support students in tackling traditionally challenging two- and three-dimensional problems. Exer- cises at the end of each chapter provide students with practice in using the techniques, and demonstrate how observations and measurements from the field can be converted into useful information about geological structures and the processes responsible for creating them. Building on the success of previous editions, this fourth edition has been brought fully up-to-date and incorporates new material on stress, deformation, strain and flow. Also new to this edition are a chapter on the underlying mathematics and discussions of uncertainties associated with particular types of measurement. With stereonet plots and full solutions to the exercises available online at www.cambridge.org/ragan, this book is a key resource for undergraduate students as well as more advanced students and researchers wanting to improve their practical skills in structural geology. -

Plate Tectonic Regulation of Global Marine Animal Diversity
Plate tectonic regulation of global marine animal diversity Andrew Zaffosa,1, Seth Finneganb, and Shanan E. Petersa aDepartment of Geoscience, University of Wisconsin–Madison, Madison, WI 53706; and bDepartment of Integrative Biology, University of California, Berkeley, CA 94720 Edited by Neil H. Shubin, The University of Chicago, Chicago, IL, and approved April 13, 2017 (received for review February 13, 2017) Valentine and Moores [Valentine JW, Moores EM (1970) Nature which may be complicated by spatial and temporal inequities in 228:657–659] hypothesized that plate tectonics regulates global the quantity or quality of samples (11–18). Nevertheless, many biodiversity by changing the geographic arrangement of conti- major features in the fossil record of biodiversity are consis- nental crust, but the data required to fully test the hypothesis tently reproducible, although not all have universally accepted were not available. Here, we use a global database of marine explanations. In particular, the reasons for a long Paleozoic animal fossil occurrences and a paleogeographic reconstruction plateau in marine richness and a steady rise in biodiversity dur- model to test the hypothesis that temporal patterns of continen- ing the Late Mesozoic–Cenozoic remain contentious (11, 12, tal fragmentation have impacted global Phanerozoic biodiversity. 14, 19–22). We find a positive correlation between global marine inverte- Here, we explicitly test the plate tectonic regulation hypothesis brate genus richness and an independently derived quantitative articulated by Valentine and Moores (1) by measuring the extent index describing the fragmentation of continental crust during to which the fragmentation of continental crust covaries with supercontinental coalescence–breakup cycles. The observed posi- global genus-level richness among skeletonized marine inverte- tive correlation between global biodiversity and continental frag- brates. -

Paleomagnetism and U-Pb Geochronology of the Late Cretaceous Chisulryoung Volcanic Formation, Korea
Jeong et al. Earth, Planets and Space (2015) 67:66 DOI 10.1186/s40623-015-0242-y FULL PAPER Open Access Paleomagnetism and U-Pb geochronology of the late Cretaceous Chisulryoung Volcanic Formation, Korea: tectonic evolution of the Korean Peninsula Doohee Jeong1, Yongjae Yu1*, Seong-Jae Doh2, Dongwoo Suk3 and Jeongmin Kim4 Abstract Late Cretaceous Chisulryoung Volcanic Formation (CVF) in southeastern Korea contains four ash-flow ignimbrite units (A1, A2, A3, and A4) and three intervening volcano-sedimentary layers (S1, S2, and S3). Reliable U-Pb ages obtained for zircons from the base and top of the CVF were 72.8 ± 1.7 Ma and 67.7 ± 2.1 Ma, respectively. Paleomagnetic analysis on pyroclastic units yielded mean magnetic directions and virtual geomagnetic poles (VGPs) as D/I = 19.1°/49.2° (α95 =4.2°,k = 76.5) and VGP = 73.1°N/232.1°E (A95 =3.7°,N =3)forA1,D/I = 24.9°/52.9° (α95 =5.9°,k =61.7)and VGP = 69.4°N/217.3°E (A95 =5.6°,N=11) for A3, and D/I = 10.9°/50.1° (α95 =5.6°,k = 38.6) and VGP = 79.8°N/ 242.4°E (A95 =5.0°,N = 18) for A4. Our best estimates of the paleopoles for A1, A3, and A4 are in remarkable agreement with the reference apparent polar wander path of China in late Cretaceous to early Paleogene, confirming that Korea has been rigidly attached to China (by implication to Eurasia) at least since the Cretaceous. The compiled paleomagnetic data of the Korean Peninsula suggest that the mode of clockwise rotations weakened since the mid-Jurassic. -

Solis Catherine 202006 MAS Thesis.Pdf
An Investigation of Display Shapes and Projections for Supporting Spatial Visualization Using a Virtual Overhead Map by Catherine Solis A thesis submitted in conformity with the requirements for the degree of Master of Applied Science Graduate Department of Mechanical & Industrial Engineering University of Toronto c Copyright 2020 by Catherine Solis Abstract An Investigation of Display Shapes and Projections for Supporting Spatial Visualization Using a Virtual Overhead Map Catherine Solis Master of Applied Science Graduate Department of Mechanical & Industrial Engineering University of Toronto 2020 A novel map display paradigm named \SkyMap" has been introduced to reduce the cognitive effort associated with using map displays for wayfinding and navigation activities. Proposed benefits include its overhead position, large scale, and alignment with the mapped environment below. This thesis investigates the substantiation of these benefits by comparing a conventional heads-down display to flat and domed SkyMap implementations through a spatial visualization task. A within-subjects study was conducted in a virtual reality simulation of an urban environment, in which participants indicated on a map display the perceived location of a landmark seen in their environment. The results showed that accuracy at this task was greater with a flat SkyMap, and domes with stereographic and equidistant projections, than with a heads-down map. These findings confirm the proposed benefits of SkyMap, yield important design implications, and inform future research. ii Acknowledgements Firstly, I'd like to thank my supervisor Paul Milgram for his patience and guidance over these past two and a half years. I genuinely marvel at his capacity to consistently challenge me to improve as a scholar and yet simultaneously show nothing but the utmost confidence in my abilities. -

1 Introduction Gondwana
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Sydney eScholarship Regional plate tectonic reconstructions of the Indian Ocean Thesis Submitted in fulfilment of the requirements for the degree of Doctor of Philosophy Ana Gibbons School of Geosciences 2012 Supervised by Professor R. Dietmar Müller and Dr Joanne Whittaker The University of Sydney, PhD Thesis, Ana Gibbons, 2012 - Introduction DECLARATION I declare that this thesis contains less than 100,000 words and contains no work that has been submitted for a higher degree at any other university or institution. No animal or ethical approvals were applicable to this study. The use of any published written material or data has been duly acknowledged. Ana Gibbons ii The University of Sydney, PhD Thesis, Ana Gibbons, 2012 - Introduction ACKNOWLEDGEMENTS I would like to thank my supervisors for their endless encouragement, generosity, patience, and not least of all their expertise and ingenuity. I have thoroughly benefitted from working with them and cannot imagine a better supervisory team. I also thank Maria Seton, Carmen Gaina and Sabin Zahirovic for their help and encouragement. I thank Statoil (Norway), the Petroleum Exploration Society of Australia (PESA) and the School of Geosciences, University of Sydney for support. I am extremely grateful to Udo Barckhausen, Kaj Hoernle, Reinhard Werner, Paul Van Den Bogaard and all staff and crew of the CHRISP research cruise for a very informative and fun collaboration, which greatly refined this first chapter of this thesis. I also wish to thank Dr Yatheesh Vadakkeyakath from the National Institute of Oceanography, Goa, India, for his thorough review, which considerably improved the overall model and quality of the second chapter. -

Geologic History of Siletzia, a Large Igneous Province in the Oregon And
Geologic history of Siletzia, a large igneous province in the Oregon and Washington Coast Range: Correlation to the geomagnetic polarity time scale and implications for a long-lived Yellowstone hotspot Wells, R., Bukry, D., Friedman, R., Pyle, D., Duncan, R., Haeussler, P., & Wooden, J. (2014). Geologic history of Siletzia, a large igneous province in the Oregon and Washington Coast Range: Correlation to the geomagnetic polarity time scale and implications for a long-lived Yellowstone hotspot. Geosphere, 10 (4), 692-719. doi:10.1130/GES01018.1 10.1130/GES01018.1 Geological Society of America Version of Record http://cdss.library.oregonstate.edu/sa-termsofuse Downloaded from geosphere.gsapubs.org on September 10, 2014 Geologic history of Siletzia, a large igneous province in the Oregon and Washington Coast Range: Correlation to the geomagnetic polarity time scale and implications for a long-lived Yellowstone hotspot Ray Wells1, David Bukry1, Richard Friedman2, Doug Pyle3, Robert Duncan4, Peter Haeussler5, and Joe Wooden6 1U.S. Geological Survey, 345 Middlefi eld Road, Menlo Park, California 94025-3561, USA 2Pacifi c Centre for Isotopic and Geochemical Research, Department of Earth, Ocean and Atmospheric Sciences, 6339 Stores Road, University of British Columbia, Vancouver, BC V6T 1Z4, Canada 3Department of Geology and Geophysics, University of Hawaii at Manoa, 1680 East West Road, Honolulu, Hawaii 96822, USA 4College of Earth, Ocean, and Atmospheric Sciences, Oregon State University, 104 CEOAS Administration Building, Corvallis, Oregon 97331-5503, USA 5U.S. Geological Survey, 4210 University Drive, Anchorage, Alaska 99508-4626, USA 6School of Earth Sciences, Stanford University, 397 Panama Mall Mitchell Building 101, Stanford, California 94305-2210, USA ABSTRACT frames, the Yellowstone hotspot (YHS) is on southern Vancouver Island (Canada) to Rose- or near an inferred northeast-striking Kula- burg, Oregon (Fig. -

The Position of Madagascar Within Gondwana and Its Movements During Gondwana Dispersal ⇑ Colin Reeves
Journal of African Earth Sciences xxx (2013) xxx–xxx Contents lists available at ScienceDirect Journal of African Earth Sciences journal homepage: www.elsevier.com/locate/jafrearsci The position of Madagascar within Gondwana and its movements during Gondwana dispersal ⇑ Colin Reeves Earthworks BV, Achterom 41A, 2611 PL Delft, The Netherlands article info abstract Article history: A reassembly of the Precambrian fragments of central Gondwana is presented that is a refinement of a Available online xxxx tight reassembly published earlier. Fragments are matched with conjugate sides parallel as far as possible and at a distance of 60–120 km from each other. With this amount of Precambrian crust now stretched Keywords: into rifts and passive margins, a fit for all the pieces neighbouring Madagascar – East Africa, Somalia, the Madagascar Seychelles, India, Sri Lanka and Mozambique – may be made without inelegant overlap or underlap. This Gondwana works less well for wider de-stretched margins on such small fragments. A model of Gondwana dispersal Aeromagnetics is also developed, working backwards in time from the present day, confining the relative movements of Indian Ocean the major fragments – Africa, Antarctica and India – such that ocean fracture zones collapse back into Dykes themselves until each ridge-reorganisation is encountered. The movements of Antarctica with respect to Africa and of India with respect to Antarctica are defined in this way by a limited number of interval poles to achieve the Gondwana ‘fit’ situation described above. The ‘fit’ offers persuasive alignments of structural and lithologic features from Madagascar to its neighbours. The dispersal model helps describe the evolution of Madagascar’s passive margins and the role of the Madagascar Rise as a microplate in the India–Africa–Antarctica triple junction. -
Caltech, Tectonics Observatory University of Sydney, School of Geosciences the Geological Survey of Norway
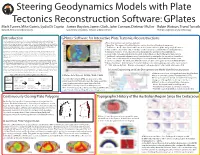
Steering Geodynamics Models with Plate Tectonics Reconstruction Software: GPlates Mark Turner, Mike Gurnis, Lydia Di Caprio James Boyden, James Clark, John Cannon, Dietmar Muller Robin Watson, Trond Torsvik Caltech, Tectonics Observatory University of Sydney, School of Geosciences The Geological Survey of Norway Introduction GPlates: Software for Interactive Plate Tectonics Reconstructions One of our goals is to attempt to place the tectonics of individual boundaries within a global context, and to understand the broader scale forces driving the deformation. There are a host of unsolved GPlates main window user interface elements: questions surrounding the causes for changes in plate motions, including the initiation of new subduction zones. In order to address these question, the TO has been developing an entirely new generation of tools 1 Menu Bar - This region of the Main Window contains the titles of the drop down menus. that are computationally advanced while being consistent with the actual structure and kinematics of 2 Tool Palette - A collection of tools which are used to interact with the globe and geological features. plate boundaries. Thus far, we have made considerable progress in this direction. 3 Time Controls - A collection of user-interface controls for precise control of the reconstruction time. One goal is to assimilate plate tectonic reconstructions into global and regional geodynamic models. 4 Animation Controls - A collection of tools to manipulate the animation of reconstructions. With the University of Sydney in Australia and the Geological Survey of Norway, the TO has been a key partner in the development of GPlates, a plate tectonic reconstruction software package. We are using 5 Zoom Slider - A mouse-controlled slider which controls the zoom level of the Globe View camera. -

Determine Strike and Dip from Two Apparent Dips
Structural geology - third year Geometrical Projection: Finding True Dip Lab.No.6 /11/2020 True dip: maximum dip angle of a plane measured in vertical section perpendicular to the strike line. Determine strike and dip from two apparent dips Example: A fault trace is exposed in two adjacent cliff faces. In one wall the apparent dip is15°, S50°E, and in the other it is 28°, N45°E (Fig.1-a).What is the strike and dip of the fault plane? Solution: (Fig.1-b) 1-Use the two trend lines, OA and OC, as fold lines .Also, use a vertical line of arbitrary length d. Draw the two trend lines in plan view. 2-From the junction of these two lines (point O) draw apparent dip angle α1 and α2. 3-Draw a line of length (d=h) perpendicular to each of the trend lines to form the triangle COZ and AOX. The value of d must always be drawn exactly the same length because it represents the depth to the layer along any strike line. 4- Triangles COZ and AOX Folded up into plan view with the two apparent-dip trend lines used as fold lines. In Fig.1-b, line AC is horizontal and parallel to the fault plane; therefore it defines the fault's strike. 5-Line OB is then plotted perpendicular to line AC; it represents the direction of true dip. 6-Using line OB as a fold line, triangle BOY (Fig.1-b) can be projected into the horizontal plane, again using length d to set the position of point Y. -

Using Palaeomagnetism to Determine Late Mesoproterozoic Palaeogeographic History and Tectonic Relations of the Sinclair Terrane, Namaqua Orogen, Namibia
Downloaded from http://sp.lyellcollection.org/ by AJS on May 1, 2016 Using palaeomagnetism to determine late Mesoproterozoic palaeogeographic history and tectonic relations of the Sinclair terrane, Namaqua orogen, Namibia J. E. PANZIK1,2*, D. A. D. EVANS1, J. J. KASBOHM3, R. HANSON4, W. GOSE5 & J. DESORMEAU6 1Department of Geology and Geophysics, Yale University, 210 Whitney Avenue, New Haven, CT 06511, USA 2Department of Earth and Planetary Sciences, University of Tennessee, 1412 Circle Drive, Knoxville, TN 37996, USA 3Department of Geosciences, Princeton University, Guyot Hall, Princeton, NJ 08544, USA 4School of Geology, Energy, and the Environment, Texas Christian University, TCU Box 298830, Fort Worth, TX 76129, USA 5Department of Geological Sciences, University of Texas at Austin, 2275 Speedway Stop C9000, Austin, TX 78712, USA 6Geological Sciences and Engineering, University of Nevada, 1664 N. Virginia Street, Reno, NV 89557, USA *Corresponding author (e-mail: [email protected]) Abstract: The Sinclair terrane is an important part of the Namaqua orogenic province in southern Namibia containing well-preserved Mesoproterozoic volcano-sedimentary successions suitable for palaeomagnetic and geochronological studies. The Guperas Formation in the upper part of the Sin- clair stratigraphic assemblage contains both volcanic and sedimentary rocks cut by a bimodal dyke swarm with felsic members dated herein by U–Pb on zircon at c. 1105 Ma. Guperas igneous rocks yield a pre-fold direction and palaeomagnetic pole similar to that previously reported. Guperas sedimentary rocks yield positive conglomerate and fold tests, with a maximum concentration of characteristic remanence directions at 100% untilting. The combined Guperas data generate a palaeomagnetic pole of 69.88 N, 004.18 E(A95 ¼ 7.48, N ¼ 9).