Robot Geometry and Kinematics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Assembly Automation with Evolutionary Nanorobots and Sensor-Based Control Applied to Nanomedicine
IEEE Transactions on Nanotechnology, Vol. 2, no. 2, June 2003 82 Assembly Automation with Evolutionary Nanorobots and Sensor-Based Control applied to Nanomedicine Adriano Cavalcanti, Member, IEEE Germany only the Federal Ministry of Education and Research Abstract—The author presents a new approach within has announced 50 million Euros to be invested in the years advanced graphics simulations for the problem of nano-assembly 2002-2006 in research and development on nanotechnology automation and its application for medicine. The problem under [21]. More specifically the firm DisplaySearch predicts rapid study concentrates its main focus on nanorobot control design for assembly manipulation and the use of evolutionary competitive market growth from US$ 84 million today to $ 1.6 Billion in agents as a suitable way to warranty the robustness on the 2007 [20]. A first series of commercially nanoproducts has proposed model. Thereby the presented paper summarizes as well been announced also as foreseeable for 2007, and to reach this distinct aspects of some techniques required to achieve a goal of build organic electronics, firms are forming successful nano-planning system design and its simulation collaborations and alliances that bring together new visualization in real time. nanoproducts through the joint effort from companies such as IBM, Motorola, Philips Electronics, PARC, Xerox, Hewlett Index Terms—Biomedical computing, control systems, genetic algorithms, mobile robots, nanotechnology, virtual reality. Packard, Dow Chemical, Bell Laboratories, Intel Corp., just to quote a few ones [13], [20]. Building patterns and manipulating atoms with the use of I.INTRODUCTION Scanning Probe Microscope (SPM) such as Atomic Force he presented paper describe the design and simulation of Microscopy and Scanning Tunneling Microscopy has been Ta mobile nanorobot in atomic scales to perform used with satisfactory success as a promising approach for the biomolecular assembly manipulation for nanomedicine [12]. -

Artificial Intelligence, Automation, and Work
Artificial Intelligence, Automation, and Work The Economics of Artifi cial Intelligence National Bureau of Economic Research Conference Report The Economics of Artifi cial Intelligence: An Agenda Edited by Ajay Agrawal, Joshua Gans, and Avi Goldfarb The University of Chicago Press Chicago and London The University of Chicago Press, Chicago 60637 The University of Chicago Press, Ltd., London © 2019 by the National Bureau of Economic Research, Inc. All rights reserved. No part of this book may be used or reproduced in any manner whatsoever without written permission, except in the case of brief quotations in critical articles and reviews. For more information, contact the University of Chicago Press, 1427 E. 60th St., Chicago, IL 60637. Published 2019 Printed in the United States of America 28 27 26 25 24 23 22 21 20 19 1 2 3 4 5 ISBN-13: 978-0-226-61333-8 (cloth) ISBN-13: 978-0-226-61347-5 (e-book) DOI: https:// doi .org / 10 .7208 / chicago / 9780226613475 .001 .0001 Library of Congress Cataloging-in-Publication Data Names: Agrawal, Ajay, editor. | Gans, Joshua, 1968– editor. | Goldfarb, Avi, editor. Title: The economics of artifi cial intelligence : an agenda / Ajay Agrawal, Joshua Gans, and Avi Goldfarb, editors. Other titles: National Bureau of Economic Research conference report. Description: Chicago ; London : The University of Chicago Press, 2019. | Series: National Bureau of Economic Research conference report | Includes bibliographical references and index. Identifi ers: LCCN 2018037552 | ISBN 9780226613338 (cloth : alk. paper) | ISBN 9780226613475 (ebook) Subjects: LCSH: Artifi cial intelligence—Economic aspects. Classifi cation: LCC TA347.A78 E365 2019 | DDC 338.4/ 70063—dc23 LC record available at https:// lccn .loc .gov / 2018037552 ♾ This paper meets the requirements of ANSI/ NISO Z39.48-1992 (Permanence of Paper). -

On the Configurations of Closed Kinematic Chains in Three
On the Configurations of Closed Kinematic Chains in three-dimensional Space Gerhard Zangerl Department of Mathematics, University of Innsbruck Technikestraße 13, 6020 Innsbruck, Austria E-mail: [email protected] Alexander Steinicke Department of Applied Mathematics and Information Technology, Montanuniversitaet Leoben Peter Tunner-Straße 25/I, 8700 Leoben, Austria E-mail: [email protected] Abstract A kinematic chain in three-dimensional Euclidean space consists of n links that are connected by spherical joints. Such a chain is said to be within a closed configuration when its link lengths form a closed polygonal chain in three dimensions. We investigate the space of configurations, described in terms of joint angles of its spherical joints, that satisfy the the loop closure constraint, meaning that the kinematic chain is closed. In special cases, we can find a new set of parameters that describe the diagonal lengths (the distance of the joints from the origin) of the configuration space by a simple domain, namely a cube of dimension n − 3. We expect that the new findings can be applied to various problems such as motion planning for closed kinematic chains or singularity analysis of their configuration spaces. To demonstrate the practical feasibility of the new method, we present numerical examples. 1 Introduction This study is the natural further development of [32] in which closed configurations of a two-dimensional kine- matic chain (KC) in terms of its joint angles were considered. As a generalization, we study the configuration spaces of a three-dimensional closed kinematic chain (CKC) with n links in terms of the joint angles of its spherical joints. -

Improved Design of a Three-Degree of Freedom Hip Exoskeleton Based on Biomimetic Parallel Structure
Improved Design of a Three-degree of Freedom Hip Exoskeleton Based on Biomimetic Parallel Structure by Min Pan A Thesis Submitted in Partial Fulfillment of the requirements for the Degree of Master of Applied Science in The Faculty of Engineering and Applied Science Mechanical Engineering Program University of Ontario Institute of Technology July, 2011 © Min Pan, 2011 Abstract The external skeletons, Exoskeletons, are not a new research area in this highly developed world. They are widely used in helping the wearer to enhance human strength, endurance, and speed while walking with them. Most exoskeletons are designed for the whole body and are powered due to their applications and high performance needs. This thesis introduces a novel design of a three-degree of freedom parallel robotic structured hip exoskeleton, which is quite different from these existing exoskeletons. An exoskeleton unit for walking typically is designed as a serial mechanism which is used for the entire leg or entire body. This thesis presents a design as a partial manipulator which is only for the hip. This has better advantages when it comes to marketing the product, these include: light weight, easy to wear, and low cost. Furthermore, most exoskeletons are designed for lower body are serial manipulators, which have large workspace because of their own volume and occupied space. This design introduced in this thesis is a parallel mechanism, which is more stable, stronger and more accurate. These advantages benefit the wearers who choose this product. This thesis focused on the analysis of the structure of this design, and verifies if the design has a reasonable and reliable structure. -

Detecting Automation of Twitter Accounts: Are You a Human, Bot, Or Cyborg?
IEEE TRANSACTIONS ON DEPENDABLE AND SECURE COMPUTING, VOL. 9, NO. X, XXXXXXX 2012 1 Detecting Automation of Twitter Accounts: Are You a Human, Bot, or Cyborg? Zi Chu, Steven Gianvecchio, Haining Wang, Senior Member, IEEE, and Sushil Jajodia, Senior Member, IEEE Abstract—Twitter is a new web application playing dual roles of online social networking and microblogging. Users communicate with each other by publishing text-based posts. The popularity and open structure of Twitter have attracted a large number of automated programs, known as bots, which appear to be a double-edged sword to Twitter. Legitimate bots generate a large amount of benign tweets delivering news and updating feeds, while malicious bots spread spam or malicious contents. More interestingly, in the middle between human and bot, there has emerged cyborg referred to either bot-assisted human or human-assisted bot. To assist human users in identifying who they are interacting with, this paper focuses on the classification of human, bot, and cyborg accounts on Twitter. We first conduct a set of large-scale measurements with a collection of over 500,000 accounts. We observe the difference among human, bot, and cyborg in terms of tweeting behavior, tweet content, and account properties. Based on the measurement results, we propose a classification system that includes the following four parts: 1) an entropy-based component, 2) a spam detection component, 3) an account properties component, and 4) a decision maker. It uses the combination of features extracted from an unknown user to determine the likelihood of being a human, bot, or cyborg. Our experimental evaluation demonstrates the efficacy of the proposed classification system. -

Design and Analysis of Lower Control
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710 International Journal of Innovative Research in Science, Engineering and Technology (An ISO 3297: 2007 Certified Organization) Vol. 5, Issue 4, April 2016 Design and Analysis of Lower Control ARM 1 2 M.Sridharan , Dr.S.Balamurugan P.G Student, Department of Mechanical Engineering, Mahendra Engineering College, Namakkal, Tamilnadu, India1 Head of the Department, Department of Mechanical Engineering, Mahendra Engineering College, Namakkal, Tamilnadu, India2 ABSTRACT: The main objective of this paper is to model and to perform structural analysis of a LOWER CONTROL ARM (LCA) used in the front suspension system, which is a sheet metal component. LCA is modeled in Pro-E software for the given specification. To analyze the LCA, CAE software is used. The load acting on the control arm are dynamic in nature, buckling load analysis is essential. First finite element analysis is performed to calculate the buckling strength, of a control arm. The FEA is carried out using Solid works stimulation package. The design modification has been done and FEA results are compared. The influencing parameters which are affecting the response are identified. After getting the final result of finite element analysis optimization has been done using design of experiment method. Taguchi’s design of experiments has been used to optimize the number of experiments. By reducing thickness of the sheet metal and by suggesting the suitable material the production cost of lower control arm is reduced. This leads to cost saving and improved material quality of the product. KEYWORDS: lower control arm, FEA, I. INTRODUCTION The suspension system caries the vehicle body and transmit all forces between the body and the road without transmitting to the driver and passengers. -

Robotic Manipulators Mechanical Project for the Domestic Robot HERA
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/333931156 Robotic Manipulators Mechanical Project For The Domestic Robot HERA Conference Paper · April 2019 CITATIONS READS 0 197 3 authors: Marina Gonbata Fabrizio Leonardi University Center of FEI University Center of FEI 3 PUBLICATIONS 0 CITATIONS 97 PUBLICATIONS 86 CITATIONS SEE PROFILE SEE PROFILE Plinio Thomaz Aquino Junior University Center of FEI 58 PUBLICATIONS 237 CITATIONS SEE PROFILE Some of the authors of this publication are also working on these related projects: Vehicle Coordination View project HERA: Home Environment Robot Assistant View project All content following this page was uploaded by Plinio Thomaz Aquino Junior on 21 June 2019. The user has requested enhancement of the downloaded file. BRAHUR-BRASERO 2019 II Brazilian Humanoid Robot Workshop and III Brazilian Workshop on Service Robotics Robotic Manipulators Mechanical Project For The Domestic Robot HERA Marina Yukari Gonbata1, Fabrizio Leonardi1 and Plinio Thomaz Aquino Junior1 Abstract— Robotics can ease peoples life, in the industrial that can ”read” the environment where it acts), ability to act and home environment. When talking about homes, robot may actuators and motors capable of producing actions, such as assist people in some domestic and tasks, done in repeat. To the displacement of the robot in the environment), robustness accomplish those tasks, a robot must have a robotic arm, so it can interact with the environment physically, therefore, a robot and intelligence (ability to handle the most diverse situations, must use its arm to do the tasks that are required by its user. in order to solve and perform tasks as complex as they are) [2]. -

Stress Analysis of a Suspension Control Arm Paula Andrea Chacón Santamaría, Alejandro Sierra, Octavio Andrés González Estrada
Stress analysis of a suspension control arm Paula Andrea Chacón Santamaría, Alejandro Sierra, Octavio Andrés González Estrada To cite this version: Paula Andrea Chacón Santamaría, Alejandro Sierra, Octavio Andrés González Estrada. Stress analysis of a suspension control arm. [Research Report] Universidad Industrial de Santander. 2018. hal- 01916247 HAL Id: hal-01916247 https://hal.archives-ouvertes.fr/hal-01916247 Submitted on 8 Nov 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. RESEARCH REPORT STRESS ANALYSIS OF A SUSPENSION CONTROL ARM Paula Andrea Chacón Santamaría Alejandro Sierra Octavio Andrés González-Estrada A010 Bucaramanga 2018 Research Group on Energy and Environment – GIEMA School of Mechanical Engineering Universidad Industrial de Santander P A Chacón Santamaría, A Sierra, O A González-Estrada, Stress analysis of a suspension control arm, School of Mechanical Engineering, Universidad Industrial de Santander. Research report, Bucaramanga, Colombia, 2018. Abstract: The suspension system of a vehicle absorbs energy to cushion and soften displacements in irregular terrains, and also supports its bodywork. Some of the components that allow the correct performance of the system are the control arms. This work aims to determine the stress distribution of a control arm for the rear suspension of a buggy vehicle. -

Design Procedure for a Fast and Accurate Parallel Manipulator Sébastien Briot, Stéphane Caro, Coralie Germain
Design Procedure for a Fast and Accurate Parallel Manipulator Sébastien Briot, Stéphane Caro, Coralie Germain To cite this version: Sébastien Briot, Stéphane Caro, Coralie Germain. Design Procedure for a Fast and Accurate Parallel Manipulator. Journal of Mechanisms and Robotics, American Society of Mechanical Engineers, 2017, 9 (6), pp.061012. 10.1115/1.4038009. hal-01587975 HAL Id: hal-01587975 https://hal.archives-ouvertes.fr/hal-01587975 Submitted on 13 Oct 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Design Procedure for a Fast and Accurate Parallel Manipulator Sebastien´ Briot∗ Stephane´ Caro CNRS CNRS Laboratoire des Sciences Laboratoire des Sciences du Numerique´ de Nantes (LS2N) du Numerique´ de Nantes (LS2N) UMR CNRS 6004 UMR CNRS 6004 44321 Nantes, France 44321 Nantes, France Email: [email protected] Email: [email protected] Coralie Germain Agrocampus Ouest 35042 Rennes, France Email: [email protected] printed circuit boards. This paper presents a design procedure for a two- Several robot architectures with four degrees of free- degree of freedom translational parallel manipulator, named dom (dof) and generating Schonflies¨ motions [2] for high- IRSBot-2. This design procedure aims at determining the speed operations have been proposed in the past decades [1, optimal design parameters of the IRSBot-2 such that the 3–6]. -

History of Robotics: Timeline
History of Robotics: Timeline This history of robotics is intertwined with the histories of technology, science and the basic principle of progress. Technology used in computing, electricity, even pneumatics and hydraulics can all be considered a part of the history of robotics. The timeline presented is therefore far from complete. Robotics currently represents one of mankind’s greatest accomplishments and is the single greatest attempt of mankind to produce an artificial, sentient being. It is only in recent years that manufacturers are making robotics increasingly available and attainable to the general public. The focus of this timeline is to provide the reader with a general overview of robotics (with a focus more on mobile robots) and to give an appreciation for the inventors and innovators in this field who have helped robotics to become what it is today. RobotShop Distribution Inc., 2008 www.robotshop.ca www.robotshop.us Greek Times Some historians affirm that Talos, a giant creature written about in ancient greek literature, was a creature (either a man or a bull) made of bronze, given by Zeus to Europa. [6] According to one version of the myths he was created in Sardinia by Hephaestus on Zeus' command, who gave him to the Cretan king Minos. In another version Talos came to Crete with Zeus to watch over his love Europa, and Minos received him as a gift from her. There are suppositions that his name Talos in the old Cretan language meant the "Sun" and that Zeus was known in Crete by the similar name of Zeus Tallaios. -
Randomized Path Planning for Redundant Manipulators Without Inverse Kinematics
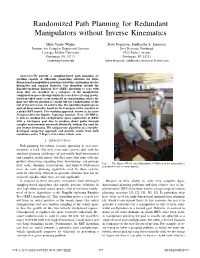
Randomized Path Planning for Redundant Manipulators without Inverse Kinematics Mike Vande Weghe Dave Ferguson, Siddhartha S. Srinivasa Institute for Complex Engineered Systems Intel Research Pittsburgh Carnegie Mellon University 4720 Forbes Avenue Pittsburgh, PA 15213 Pittsburgh, PA 15213 [email protected] {dave.ferguson, siddhartha.srinivasa}@intel.com Abstract— We present a sampling-based path planning al- gorithm capable of efficiently generating solutions for high- dimensional manipulation problems involving challenging inverse kinematics and complex obstacles. Our algorithm extends the Rapidly-exploring Random Tree (RRT) algorithm to cope with goals that are specified in a subspace of the manipulator configuration space through which the search tree is being grown. Underspecified goals occur naturally in arm planning, where the final end effector position is crucial but the configuration of the rest of the arm is not. To achieve this, the algorithm bootstraps an optimal local controller based on the transpose of the Jacobian to a global RRT search. The resulting approach, known as Jacobian Transpose-directed Rapidly Exploring Random Trees (JT-RRTs), is able to combine the configuration space exploration of RRTs with a workspace goal bias to produce direct paths through complex environments extremely efficiently, without the need for any inverse kinematics. We compare our algorithm to a recently- developed competing approach and provide results from both simulation and a 7 degree-of-freedom robotic arm. I. INTRODUCTION Path planning for robotic systems operating in real envi- ronments is hard. Not only must such systems deal with the standard planning challenges of potentially high-dimensional and complex search spaces, but they must also cope with im- perfect information regarding their surroundings and perhaps Fig. -

Robot Control and Programming: Class Notes Dr
NAVARRA UNIVERSITY UPPER ENGINEERING SCHOOL San Sebastian´ Robot Control and Programming: Class notes Dr. Emilio Jose´ Sanchez´ Tapia August, 2010 Servicio de Publicaciones de la Universidad de Navarra 987‐84‐8081‐293‐1 ii Viaje a ’Agra de Cimientos’ Era yo todav´ıa un estudiante de doctorado cuando cayo´ en mis manos una tesis de la cual me llamo´ especialmente la atencion´ su cap´ıtulo de agradecimientos. Bueno, realmente la tesis no contaba con un cap´ıtulo de ’agradecimientos’ sino mas´ bien con un cap´ıtulo alternativo titulado ’viaje a Agra de Cimientos’. En dicho capitulo, el ahora ya doctor redacto´ un pequeno˜ cuento epico´ inventado por el´ mismo. Esta pequena˜ historia relataba las aventuras de un caballero, al mas´ puro estilo ’Tolkiano’, que cabalgaba en busca de un pueblo recondito.´ Ya os podeis´ imaginar que dicho caballero, no era otro sino el´ mismo, y que su viaje era mas´ bien una odisea en la cual tuvo que superar mil y una pruebas hasta conseguir su objetivo, llegar a Agra de Cimientos (terminar su tesis). Solo´ deciros que para cada una de esas pruebas tuvo la suerte de encontrar a una mano amiga que le ayudara. En mi caso, no voy a presentarte una tesis, sino los apuntes de la asignatura ”Robot Control and Programming´´ que se imparte en ingles.´ Aunque yo no tengo tanta imaginacion´ como la de aquel doctorando para poder contaros una historia, s´ı que he tenido la suerte de encontrar a muchas personas que me han ayudado en mi viaje hacia ’Agra de Cimientos’. Y eso es, amigo lector, al abrir estas notas de clase vas a ser testigo del final de un viaje que he realizado de la mano de mucha gente que de alguna forma u otra han contribuido en su mejora.