Drag Reduction by Laminar Flow Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

1 Fluid Flow Outline Fundamentals of Rheology
Fluid Flow Outline • Fundamentals and applications of rheology • Shear stress and shear rate • Viscosity and types of viscometers • Rheological classification of fluids • Apparent viscosity • Effect of temperature on viscosity • Reynolds number and types of flow • Flow in a pipe • Volumetric and mass flow rate • Friction factor (in straight pipe), friction coefficient (for fittings, expansion, contraction), pressure drop, energy loss • Pumping requirements (overcoming friction, potential energy, kinetic energy, pressure energy differences) 2 Fundamentals of Rheology • Rheology is the science of deformation and flow – The forces involved could be tensile, compressive, shear or bulk (uniform external pressure) • Food rheology is the material science of food – This can involve fluid or semi-solid foods • A rheometer is used to determine rheological properties (how a material flows under different conditions) – Viscometers are a sub-set of rheometers 3 1 Applications of Rheology • Process engineering calculations – Pumping requirements, extrusion, mixing, heat transfer, homogenization, spray coating • Determination of ingredient functionality – Consistency, stickiness etc. • Quality control of ingredients or final product – By measurement of viscosity, compressive strength etc. • Determination of shelf life – By determining changes in texture • Correlations to sensory tests – Mouthfeel 4 Stress and Strain • Stress: Force per unit area (Units: N/m2 or Pa) • Strain: (Change in dimension)/(Original dimension) (Units: None) • Strain rate: Rate -

Introduction to the CFD Module
INTRODUCTION TO CFD Module Introduction to the CFD Module © 1998–2018 COMSOL Protected by patents listed on www.comsol.com/patents, and U.S. Patents 7,519,518; 7,596,474; 7,623,991; 8,457,932; 8,954,302; 9,098,106; 9,146,652; 9,323,503; 9,372,673; and 9,454,625. Patents pending. This Documentation and the Programs described herein are furnished under the COMSOL Software License Agreement (www.comsol.com/comsol-license-agreement) and may be used or copied only under the terms of the license agreement. COMSOL, the COMSOL logo, COMSOL Multiphysics, COMSOL Desktop, COMSOL Server, and LiveLink are either registered trademarks or trademarks of COMSOL AB. All other trademarks are the property of their respective owners, and COMSOL AB and its subsidiaries and products are not affiliated with, endorsed by, sponsored by, or supported by those trademark owners. For a list of such trademark owners, see www.comsol.com/trademarks. Version: COMSOL 5.4 Contact Information Visit the Contact COMSOL page at www.comsol.com/contact to submit general inquiries, contact Technical Support, or search for an address and phone number. You can also visit the Worldwide Sales Offices page at www.comsol.com/contact/offices for address and contact information. If you need to contact Support, an online request form is located at the COMSOL Access page at www.comsol.com/support/case. Other useful links include: • Support Center: www.comsol.com/support • Product Download: www.comsol.com/product-download • Product Updates: www.comsol.com/support/updates •COMSOL Blog: www.comsol.com/blogs • Discussion Forum: www.comsol.com/community •Events: www.comsol.com/events • COMSOL Video Gallery: www.comsol.com/video • Support Knowledge Base: www.comsol.com/support/knowledgebase Part number: CM021302 Contents Introduction . -

Hydraulics Manual Glossary G - 3
Glossary G - 1 GLOSSARY OF HIGHWAY-RELATED DRAINAGE TERMS (Reprinted from the 1999 edition of the American Association of State Highway and Transportation Officials Model Drainage Manual) G.1 Introduction This Glossary is divided into three parts: · Introduction, · Glossary, and · References. It is not intended that all the terms in this Glossary be rigorously accurate or complete. Realistically, this is impossible. Depending on the circumstance, a particular term may have several meanings; this can never change. The primary purpose of this Glossary is to define the terms found in the Highway Drainage Guidelines and Model Drainage Manual in a manner that makes them easier to interpret and understand. A lesser purpose is to provide a compendium of terms that will be useful for both the novice as well as the more experienced hydraulics engineer. This Glossary may also help those who are unfamiliar with highway drainage design to become more understanding and appreciative of this complex science as well as facilitate communication between the highway hydraulics engineer and others. Where readily available, the source of a definition has been referenced. For clarity or format purposes, cited definitions may have some additional verbiage contained in double brackets [ ]. Conversely, three “dots” (...) are used to indicate where some parts of a cited definition were eliminated. Also, as might be expected, different sources were found to use different hyphenation and terminology practices for the same words. Insignificant changes in this regard were made to some cited references and elsewhere to gain uniformity for the terms contained in this Glossary: as an example, “groundwater” vice “ground-water” or “ground water,” and “cross section area” vice “cross-sectional area.” Cited definitions were taken primarily from two sources: W.B. -
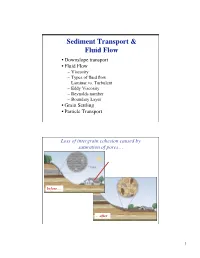
Sediment Transport & Fluid Flow
Sediment Transport & Fluid Flow • Downslope transport • Fluid Flow – Viscosity – Types of fluid flow – Laminar vs. Turbulent – Eddy Viscosity – Reynolds number – Boundary Layer • Grain Settling • Particle Transport Loss of intergrain cohesion caused by saturation of pores… before… …after 1 Different kinds of mass movements, variable velocity (and other factors) From weathering to deposition: sorting and modification of clastic particles 2 Effects of transport on rounding, sorting How are particles transported by fluids? What are the key parameters? 3 Flow regimes in a stream Fluid Flow • Fundamental Physical Properties of Fluids – Density (ρ) – Viscosity (µ) Control the ability of a fluid to erode & transport particles • Viscosity - resistance to flow, or deform under shear stress. – Air - low – Water - low – Ice- high ∆µ with ∆ T, or by mixing other materials 4 Shear Deformation Shear stress (τ) is the shearing force per unit area • generated at the boundary between two moving fluids • function of the extent to which the slower moving fluid retards motion of the faster moving fluid (i.e., viscosity) Fluid Viscosity and Flow • Dynamic viscosity(µ) - the resistance of a substance (water) to ∆ shape during flow (shear stress) ! µ = du/dy where, dy τ = shear stress (dynes/cm2) du/dy = velocity gradient (rate of deformation) • Kinematic viscosity(v) =µ/ρ 5 Behaviour of Fluids Viscous Increased fluidity Types of Fluids Water - flow properties function of sediment concentrations • Newtonian Fluids - no strength, no ∆ in viscosity as shear rate ∆’s (e.g., -

Introduction
VERIFYING CONSISTENCY OF EFFECTIVE-VISCOSITY AND PRESSURE- LOSS DATA FOR DESIGNING FOAM PROPORTIONING SYSTEMS Bogdan Z. Dlugogorski1, Ted H. Schaefer1,2 and Eric M. Kennedy1 1Process Safety and Environment Protection Research Group School of Engineering The University of Newcastle Callaghan, NSW 2308, AUSTRALIA Phone: +61 2 4921 6176, Fax: +61 2 4921 6920 Email: [email protected] 23M Specialty Materials Laboratory Dunheved Circuit, St Marys, NSW 2760, AUSTRALIA ABSTRACT Aspirating and compressed-air foam systems often incorporate proportioners designed to draw sufficient rate of foam concentrate into the flowing stream of water. The selection of proportioner’s piping follows from the engineering correlations linking the pressure loss with the flow rate of a concentrate, for specified temperature (usually 20 oC) and pipe size. Unfortunately, reports exist that such correlations may be inaccurate, resulting in the design of underperforming suppression systems. To illustrate the problem, we introduce two correlations, sourced from industry and developed for the same foam concentrate, that describe effective viscosity (μeff) and pressure loss as functions of flow rate and pipe diameter. We then present a methodology to verify the internal consistency of each data set. This methodology includes replotting the curves of the effective viscosity vs the nominal shear rate at the wall (32Q/(πD3)) and also replotting the pressure loss in terms of the stress rate at the wall (τw) vs the nominal shear rate at the wall. In the laminar regime, for time-independent fluids with no slip at the wall (which is the behaviour displayed by foam concentrates), consistent data sets are 3 3 characterised by a single curve of μeff vs 32Q/(πD ), and a single curve of τw vs 32Q/(πD ) in the laminar regime. -

Tubular Flow with Laminar Flow (CHE 512) M.P. Dudukovic Chemical Reaction Engineering Laboratory (CREL), Washington University, St
Tubular Flow with Laminar Flow (CHE 512) M.P. Dudukovic Chemical Reaction Engineering Laboratory (CREL), Washington University, St. Louis, MO 4. TUBULAR REACTORS WITH LAMINAR FLOW Tubular reactors in which homogeneous reactions are conducted can be empty or packed conduits of various cross-sectional shape. Pipes, i.e tubular vessels of cylindrical shape, dominate. The flow can be turbulent or laminar. The questions arise as to how to interpret the performance of tubular reactors and how to measure their departure from plug flow behavior. We will start by considering a cylindrical pipe with fully developed laminar flow. For a Newtonian fluid the velocity profile is given by r 2 u = 2u 1 (1) R u where u = max is the mean velocity. By making a balance on species A, which may be a 2 reactant or a tracer, we arrive at the following equation: 2C C D C C D A u A + r A r = A (2) z2 z r r r A t For an exercise this equation should be derived by making a balance on an annular cylindrical region of length z , inner radius r and outer radius r. We should render this equation dimensionless by defining: z r t C = ; = ; = ;c = A L R t C Ao where L is the pipe length of interest, R is the pipe radius, t = L/u is the mean residence time, C is some reference concentration. Let us assume an n-th order rate form. Ao The above equation (2) now reads: 2 D c c D L 1 c n1 c 212 + kC t c n = (2a) 2 () A0 u L u R R We define: u L L2 / D characteristic diffusion time() axial Pe = = = (3) a D L / u process time() characteristic convection time = axial Peclet number. -

7. Laminar and Turbulent Flow
CREST Foundation Studies Fundamentals of Fluid Mechanics 7. Laminar and turbulent flow [This material relates predominantly to module ELP035] 7.1 Real fluids 7.2 Examples of Laminar and turbulent flow 7.1 Real Fluids The flow of real fluids exhibits viscous effect, that is they tend to “stick” to solid surfaces and have stresses within their body. You might remember from earlier in the course Newtons law of viscosity: du τ ∝ dy This tells us that the shear stress, τ, in a fluid is proportional to the velocity gradient - the rate of change of velocity across the fluid path. For a “Newtonian” fluid we can write: du τµ= dy where the constant of proportionality, µ, is known as the coefficient of viscosity (or simply viscosity). We saw that for some fluids - sometimes known as exotic fluids - the value of µ changes with stress or velocity gradient. We shall only deal with Newtonian fluids. In this Unit we shall look at how the forces due to momentum changes on the fluid and viscous forces compare and what changes take place. 7.2 Examples of Laminar and turbulent flow If we were to take a pipe of free flowing water and inject a dye into the middle of the stream, what would we expect to happen? Would it be this.... 1 CREST Foundation Studies Fundamentals of Fluid Mechanics this.... or this? Actually all would happen - but for different flow rates. The top occurs when the fluid is flowing fast and the lower when it is flowing slowly. The top situation is known as laminar flow and the lower as turbulent flow. -

Viscous Flow in Ducts Reynolds Number Regimes
Viscous Flow in Ducts We want to study the viscous flow in ducts with various velocities, fluids and duct shapes. The basic problem is this: Given the pipe geometry and its added components (e.g. fittings, valves, bends, and diffusers) plus the desired flow rate and fluid properties, what pressure drop is needed to drive the flow? Reynolds number regimes The most important parameter in fluid mechanics is the Reynolds number: where is the fluid density, U is the flow velocity, L is the characteristics length scale related to the flow geometry, and is the fluid viscosity. The Reynolds number can be interpreted as the ratio of momentum (or inertia) to viscous forces. A profound change in fluid behavior occurs at moderate Reynolds number. The flow ceases being smooth and steady (laminar) and becomes fluctuating (turbulent). The changeover is called transition. Transition depends on many effects such as wall roughness or the fluctuations in the inlet stream, but the primary parameter is the Reynolds number. Turbulence can be measured by sensitive instruments such as a hot‐wire anemometer or piezoelectric pressure transducer. Fig.1: The three regimes of viscous flow: a) laminar (low Re), b) transition at intermediate Re, and c) turbulent flow in high Re. The fluctuations, typically ranging from 1 to 20% of the average velocity, are not strictly periodic but are random and encompass a continuous range of frequencies. In a typical wind tunnel flow at high Re, the turbulent frequency ranges from 1 to 10,000 Hz. The higher Re turbulent flow is unsteady and irregular but, when averaged over time, is steady and predictable. -

Understand the Real World of Mixing
Back to Basics Understand the Real World of Mixing Thomas Post Post Mixing Optimization and Most chemical engineering curricula do not Solutions adequately address mixing as it is commonly practiced in the chemical process industries. This article attempts to fi ll in some of the gaps by explaining fl ow patterns, mixing techniques, and the turbulent, transitional and laminar mixing regimes. or most engineers, college memories about mix- This is the extent of most engineers’ collegiate-level ing are limited to ideal reactors. Ideal reactors are preparation for real-world mixing applications. Since almost Fextreme cases, and are represented by the perfect- everything manufactured must be mixed, most new gradu- mixing model, the steady-state perfect-mixing model, or the ates are ill-prepared to optimize mixing processes. This steady-state plug-fl ow model (Figure 1). These models help article attempts to bridge the gap between the theory of the determine kinetics and reaction rates. ideal and the realities of actual practice. For an ideal batch reactor, the perfect-mixing model assumes that the composition is uniform throughout the Limitations of the perfect-mixing reactor at any instant, and gives the reaction rate as: and plug-fl ow models Classical chemical engineering focuses on commodity (–rA)V = NA0 × (dXA/dt) (1) chemicals produced in large quantities in continuous opera- tions, such as in the petrochemical, polymer, mining, fertil- The steady-state perfect-mixing model for a continuous process is similar, with the composition uniform throughout the reactor at any instant in time. However, it incorporates Feed the inlet molar fl owrate, FA0: Uniformly Mixed (–rA)V = FA0 × XA (2) The steady-state plug-fl ow model of a continuous process assumes that the composition is the same within a differential volume of the reactor in the direction of fl ow, typically within a pipe: Product (–r )V = F × dX (3) Uniformly A A0 A Mixed These equations can be integrated to determine the time required to achieve a conversion of XA. -

Blowing and Suction Flow Separation Control Over NACA 0012 Airfoil
Journal of Mechanical Science and Technology 28 (4) (2014) 1297~1310 www.springerlink.com/content/1738-494x DOI 10.1007/s12206-014-0119-1 Numerical study of blowing and suction slot geometry optimization on NACA 0012 airfoil† Kianoosh Yousefi*, Reza Saleh and Peyman Zahedi Department of Mechanical Engineering, College of Engineering, Mashhad Branch, Islamic Azad University, Mashhad, Iran (Manuscript Received March 1, 2013; Revised July 10, 2013; Accepted November 9, 2013) ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- Abstract The effects of jet width on blowing and suction flow control were evaluated for a NACA 0012 airfoil. RANS equations were em- ployed in conjunction with a Menter’s shear stress turbulent model. Tangential and perpendicular blowing at the trailing edge and per- pendicular suction at the leading edge were applied on the airfoil upper surface. The jet widths were varied from 1.5% to 4% of the chord length, and the jet velocity was 0.3 and 0.5 of the free-stream velocity. Results of this study demonstrated that when the blowing jet width increases, the lift-to-drag ratio rises continuously in tangential blowing and decreases quasi-linearly in perpendicular blowing. The jet widths of 3.5% and 4% of the chord length are the most effective amounts for tangential blowing, and smaller jet -
Laminar How Control (1976- 1982)
NASA T" 84496 NASATechnical Memomdm 844% c.1 Laminar How Control (1976-1982) A Selected, Annotated Bibliography Marie H. Tuttle and Dal V. Maddalon AUGUST 1982 " . .. - " NASA NASATechnical Memorandm -% Laminar flow Control (1976-1982) A Selected, Annotated Bibliography Marie H. Tuttle and Dal V. Maddalon Langley Research Center Hampton, Virginia National Aeronautics and Space Administration Scientlflc and Technlcal Information Branch \. i ” INTRODUCTION .................................................................... 1 BIBLIOGRAPHY (1976-1982) ........................................................ 3 APPENDIX ........................................................................ 65 ENTRIES WITH PUBLICATIONDATES PRIOR TO 1976 .................................... 66 AUTHOR INDEX .................................................................... 76 iii INTRODUCTION Laminar Flow Control (LFC) technologydevelopment has undergone tremendous progress in recent years as focused research efforts in materials, aerodynamics, systems,and structures have begun to pay off. A virtualexplosion in the number of research papers published on this subject has occurred since interest was first stimulated by the 1976 introduction of the NASA's Aircraft EnergyEfficiency Laminar Flow Control (ACEE/LFC) Program.Today, a wide variety of fundamentaland applied researchprograms exist, not only in controlled (active) boundary-layer flow, but alsoin natural (passive) laminar flow. Studies of airfoils whichcombine the two methods (hybrid) are now beginning.