Retrieval of Water Vapor Using Ground-Based Observations from a Prototype ATOMMS Active Centimeter- and Millimeter-Wavelength Occultation Instrument
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 5 Measures of Humidity Phases of Water
Chapter 5 Atmospheric Moisture Measures of Humidity 1. Absolute humidity 2. Specific humidity 3. Actual vapor pressure 4. Saturation vapor pressure 5. Relative humidity 6. Dew point Phases of Water Water Vapor n o su ti b ra li o n m p io d a a at ep t v s o io e en s n d it n io o n c freezing Liquid Water Ice melting 1 Coexistence of Water & Vapor • Even below the boiling point, some water molecules leave the liquid (evaporation). • Similarly, some water molecules from the air enter the liquid (condense). • The behavior happens over ice too (sublimation and condensation). Saturation • If we cap the air over the water, then more and more water molecules will enter the air until saturation is reached. • At saturation there is a balance between the number of water molecules leaving the liquid and entering it. • Saturation can occur over ice too. Hydrologic Cycle 2 Air Parcel • Enclose a volume of air in an imaginary thin elastic container, which we will call an air parcel. • It contains oxygen, nitrogen, water vapor, and other molecules in the air. 1. Absolute Humidity Mass of water vapor Absolute humidity = Volume of air The absolute humidity changes with the volume of the parcel, which can change with temperature or pressure. 2. Specific Humidity Mass of water vapor Specific humidity = Total mass of air The specific humidity does not change with parcel volume. 3 Specific Humidity vs. Latitude • The highest specific humidities are observed in the tropics and the lowest values in the polar regions. -

Insar Water Vapor Data Assimilation Into Mesoscale Model
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination. IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING 1 InSAR Water Vapor Data Assimilation into Mesoscale Model MM5: Technique and Pilot Study Emanuela Pichelli, Rossella Ferretti, Domenico Cimini, Giulia Panegrossi, Daniele Perissin, Nazzareno Pierdicca, Senior Member, IEEE, Fabio Rocca, and Bjorn Rommen Abstract—In this study, a technique developed to retrieve inte- an extremely important element of the atmosphere because its grated water vapor from interferometric synthetic aperture radar distribution is related to clouds, precipitation formation, and it (InSAR) data is described, and a three-dimensional variational represents a large proportion of the energy budget in the atmo- assimilation experiment of the retrieved precipitable water vapor into the mesoscale weather prediction model MM5 is carried out. sphere. Its representation inside numerical weather prediction The InSAR measurements were available in the framework of the (NWP) models is critical to improve the weather forecast. It is European Space Agency (ESA) project for the “Mitigation of elec- also very challenging because water vapor is involved in pro- tromagnetic transmission errors induced by atmospheric water cesses over a wide range of spatial and temporal scales. An vapor effects” (METAWAVE), whose goal was to analyze and pos- improvement in atmospheric water vapor monitoring that can sibly predict the phase delay induced by atmospheric water vapor on the spaceborne radar signal. The impact of the assimilation on be assimilated in NWP models would improve the forecast the model forecast is investigated in terms of temperature, water accuracy of precipitation and severe weather [1], [3]. -

ESSENTIALS of METEOROLOGY (7Th Ed.) GLOSSARY
ESSENTIALS OF METEOROLOGY (7th ed.) GLOSSARY Chapter 1 Aerosols Tiny suspended solid particles (dust, smoke, etc.) or liquid droplets that enter the atmosphere from either natural or human (anthropogenic) sources, such as the burning of fossil fuels. Sulfur-containing fossil fuels, such as coal, produce sulfate aerosols. Air density The ratio of the mass of a substance to the volume occupied by it. Air density is usually expressed as g/cm3 or kg/m3. Also See Density. Air pressure The pressure exerted by the mass of air above a given point, usually expressed in millibars (mb), inches of (atmospheric mercury (Hg) or in hectopascals (hPa). pressure) Atmosphere The envelope of gases that surround a planet and are held to it by the planet's gravitational attraction. The earth's atmosphere is mainly nitrogen and oxygen. Carbon dioxide (CO2) A colorless, odorless gas whose concentration is about 0.039 percent (390 ppm) in a volume of air near sea level. It is a selective absorber of infrared radiation and, consequently, it is important in the earth's atmospheric greenhouse effect. Solid CO2 is called dry ice. Climate The accumulation of daily and seasonal weather events over a long period of time. Front The transition zone between two distinct air masses. Hurricane A tropical cyclone having winds in excess of 64 knots (74 mi/hr). Ionosphere An electrified region of the upper atmosphere where fairly large concentrations of ions and free electrons exist. Lapse rate The rate at which an atmospheric variable (usually temperature) decreases with height. (See Environmental lapse rate.) Mesosphere The atmospheric layer between the stratosphere and the thermosphere. -

TABLE A-2 Properties of Saturated Water (Liquid–Vapor): Temperature Table Specific Volume Internal Energy Enthalpy Entropy # M3/Kg Kj/Kg Kj/Kg Kj/Kg K Sat
720 Tables in SI Units TABLE A-2 Properties of Saturated Water (Liquid–Vapor): Temperature Table Specific Volume Internal Energy Enthalpy Entropy # m3/kg kJ/kg kJ/kg kJ/kg K Sat. Sat. Sat. Sat. Sat. Sat. Sat. Sat. Temp. Press. Liquid Vapor Liquid Vapor Liquid Evap. Vapor Liquid Vapor Temp. Њ v ϫ 3 v Њ C bar f 10 g uf ug hf hfg hg sf sg C O 2 .01 0.00611 1.0002 206.136 0.00 2375.3 0.01 2501.3 2501.4 0.0000 9.1562 .01 H 4 0.00813 1.0001 157.232 16.77 2380.9 16.78 2491.9 2508.7 0.0610 9.0514 4 5 0.00872 1.0001 147.120 20.97 2382.3 20.98 2489.6 2510.6 0.0761 9.0257 5 6 0.00935 1.0001 137.734 25.19 2383.6 25.20 2487.2 2512.4 0.0912 9.0003 6 8 0.01072 1.0002 120.917 33.59 2386.4 33.60 2482.5 2516.1 0.1212 8.9501 8 10 0.01228 1.0004 106.379 42.00 2389.2 42.01 2477.7 2519.8 0.1510 8.9008 10 11 0.01312 1.0004 99.857 46.20 2390.5 46.20 2475.4 2521.6 0.1658 8.8765 11 12 0.01402 1.0005 93.784 50.41 2391.9 50.41 2473.0 2523.4 0.1806 8.8524 12 13 0.01497 1.0007 88.124 54.60 2393.3 54.60 2470.7 2525.3 0.1953 8.8285 13 14 0.01598 1.0008 82.848 58.79 2394.7 58.80 2468.3 2527.1 0.2099 8.8048 14 15 0.01705 1.0009 77.926 62.99 2396.1 62.99 2465.9 2528.9 0.2245 8.7814 15 16 0.01818 1.0011 73.333 67.18 2397.4 67.19 2463.6 2530.8 0.2390 8.7582 16 17 0.01938 1.0012 69.044 71.38 2398.8 71.38 2461.2 2532.6 0.2535 8.7351 17 18 0.02064 1.0014 65.038 75.57 2400.2 75.58 2458.8 2534.4 0.2679 8.7123 18 19 0.02198 1.0016 61.293 79.76 2401.6 79.77 2456.5 2536.2 0.2823 8.6897 19 20 0.02339 1.0018 57.791 83.95 2402.9 83.96 2454.1 2538.1 0.2966 8.6672 20 21 0.02487 1.0020 -

Humidity, Condensation, and Clouds-I
Humidity, Condensation, and Clouds-I GEOL 1350: Introduction To Meteorology 1 Overview • Water Circulation in the Atmosphere • Properties of Water • Measures of Water Vapor in the Atmosphere (Vapor Pressure, Absolute Humidity, Specific Humidity, Mixing Ratio, Relative Humidity, Dew Point) 2 Where does the moisture in the atmosphere come from ? Major Source Major sink Evaporation from ocean Precipitation 3 Earth’s Water Distribution 4 Fresh vs. salt water • Most of the earth’s water is found in the oceans • Only 3% is fresh water and 3/4 of that is ice • The atmosphere contains only ~ 1 week supply of precipitation! 5 Properties of Water • Physical States only substance that are present naturally in three states • Density liquid : ~ 1.0 g / cm3 , solid: ~ 0.9 g / cm3 , vapor: ~10-5 g / cm3 6 Properties of Water (cont’) • Radiative Properties – transparent to visible wavelengths – virtually opaque to many infrared wavelengths – large range of albedo possible • water 10 % (daily average) • Ice 30 to 40% • Snow 20 to 95% • Cloud 30 to 90% 7 Three phases of water • Evaporation liquid to vapor • Condensation vapor to liquid • Sublimation solid to vapor • Deposition vapor to solid • Melting solid to liquid • Freezing liquid to solid 8 Heat exchange with environment during phase change As water moves toward vapor it absorbs latent heat to keep the molecules in rapid mo9ti on Energy associated with phase change Sublimation Deposition 10 Sublimation – evaporate ice directly to water vapor Take one gram of ice at zero degrees centigrade Energy required -

Chapter 1 INTRODUCTION and BASIC CONCEPTS
CLASS Third Units PURE SUBSTANCE • Pure substance: A substance that has a fixed chemical composition throughout. • Air is a mixture of several gases, but it is considered to be a pure substance. Nitrogen and gaseous air are pure substances. A mixture of liquid and gaseous water is a pure substance, but a mixture of liquid and gaseous air is not. 2 PHASES OF A PURE SUBSTANCE The molecules in a solid are kept at their positions by the large springlike inter-molecular forces. In a solid, the attractive and repulsive forces between the molecules tend to maintain them at relatively constant distances from each other. The arrangement of atoms in different phases: (a) molecules are at relatively fixed positions in a solid, (b) groups of molecules move about each other in the liquid phase, and (c) molecules move about at random in the gas phase. 3 PHASE-CHANGE PROCESSES OF PURE SUBSTANCES • Compressed liquid (subcooled liquid): A substance that it is not about to vaporize. • Saturated liquid: A liquid that is about to vaporize. At 1 atm and 20°C, water exists in the liquid phase (compressed liquid). At 1 atm pressure and 100°C, water exists as a liquid that is ready to vaporize (saturated liquid). 4 • Saturated vapor: A vapor that is about to condense. • Saturated liquid–vapor mixture: The state at which the liquid and vapor phases coexist in equilibrium. • Superheated vapor: A vapor that is not about to condense (i.e., not a saturated vapor). As more heat is transferred, At 1 atm pressure, the As more heat is part of the saturated liquid temperature remains transferred, the vaporizes (saturated liquid– constant at 100°C until the temperature of the vapor mixture). -
Weather Science: How to Make a Cloud in a Jar (2 Different Methods!)
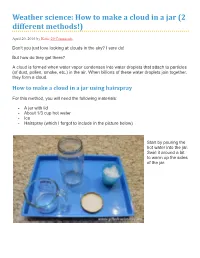
Weather science: How to make a cloud in a jar (2 different methods!) April 20, 2016 by Katie 20 Comments Don’t you just love looking at clouds in the sky? I sure do! But how do they get there? A cloud is formed when water vapor condenses into water droplets that attach to particles (of dust, pollen, smoke, etc.) in the air. When billions of these water droplets join together, they form a cloud. How to make a cloud in a jar using hairspray For this method, you will need the following materials: • A jar with lid • About 1/3 cup hot water • Ice • Hairspray (which I forgot to include in the picture below) Start by pouring the hot water into the jar. Swirl it around a bit to warm up the sides of the jar. Turn the lid upside down and place it on the top of the jar. Place several ice cubes onto the lid, and allow it to rest on the top of the jar for about 20 seconds. Remove the lid, quickly spray a bit of hairspray into the jar, and then replace the lid with the ice still on top. Watch the cloud form. When you see a good amount of condensation form, remove the lid and watch the “cloud” escape into the air. How does it work? When you add the warm water to the jar, some of it turns to water vapor. The water vapor rises to the top of the jar where it comes into contact with cold air, thanks to the ice cubes on top. -

Evaluation of Forecasts of the Water Vapor Signature of Atmospheric Rivers in Operational Numerical Weather Prediction Models
DECEMBER 2013 W I C K E T A L . 1337 Evaluation of Forecasts of the Water Vapor Signature of Atmospheric Rivers in Operational Numerical Weather Prediction Models GARY A. WICK,PAUL J. NEIMAN,F.MARTIN RALPH, AND THOMAS M. HAMILL NOAA/Earth System Research Laboratory/Physical Sciences Division, Boulder, Colorado (Manuscript received 15 February 2013, in final form 25 July 2013) ABSTRACT The ability of five operational ensemble forecast systems to accurately represent and predict atmospheric rivers (ARs) is evaluated as a function of lead time out to 10 days over the northeastern Pacific Ocean and west coast of North America. The study employs the recently developed Atmospheric River Detection Tool to compare the distinctive signature of ARs in integrated water vapor (IWV) fields from model forecasts and corresponding satellite-derived observations. The model forecast characteristics evaluated include the pre- diction of occurrence of ARs, the width of the IWV signature of ARs, their core strength as represented by the IWV content along the AR axis, and the occurrence and location of AR landfall. Analysis of three cool seasons shows that while the overall occurrence of ARs is well forecast out to a 10-day lead, forecasts of landfall occurrence are poorer, and skill degrades with increasing lead time. Average errors in the position of landfall are significant, increasing to over 800 km at 10-day lead time. Also, there is a 18–28 southward position bias at 7-day lead time. The forecast IWV content along the AR axis possesses a slight moist bias averaged over the entire AR but little bias near landfall. -

Atmospheric Water
Lecture 6 22-Aug-2016 ATMOSPHERIC WATER In the last class, we were discussing about atmospheric water. Two prominent hydrological process involving atmospheric water are: Evaporation Precipitation Water exists in gaseous form as vapor We talked about specific humidity ( ) and vapor pressure (e) One relation between and e was obtained from ideal gas law and Dalton’s law of partial pressure. Water vapor pressure in an atmospheric air, (T in K) =gas constant for water vapor p =total pressure exerted by the atmospheric air p = From Dalton’s law p-e= = dry density. =gas constant for dry air. As = + And The total pressure, p= Therefore, from the ratio of e/p, an approximation can be obtained as such: Where Also = J/kg K Therefore the gas constant of moist air increases with specific humidity. SATURATION VAPOR PRESSURE For a particular temperature, there is a maximum moisture content that air can hold. This maximum moisture content is the saturated moisture content. The vapor exerted at this saturated moisture is the saturation vapor pressure ( ) At saturated moisture content, the rate of evaporation and condensation are equal. Over a water surface, the saturated vapor pressure ( ) is related to the temperature (T) as (Raudkivi, 1979) . T= temperature in degree Celsius. RELATIVE HUMIDITY The ratio of actual vapor pressure to its saturation value at a given air temperature At a given point specific humidity if the observed value of e is at a given temperature, we can evaluate the corresponding dew point temperature(Td) for the corresponding (e) EXAMPLE From a weather station the following parameters were measured: Air pressure=120 kPa; Air temperature = 18 ; Wet bulb temperature or dew point temp = 15 ; Calculate the vapor pressure, relative humidity, and specific humidity of the air. -

Condensation Fact Sheet
Condensation Fact Sheet METAL BUILDING MANUFACTURERS ASSOCIATION The Condensation Process In metal building systems, we are concerned with two different Condensation occurs when warmer moist air comes in contact areas or locations: visible condensation which occurs on with cold surfaces such as framing members, windows and surfaces below dew point temperatures; and concealed other accessories, or the colder region within the insulation condensation which occurs when moisture has passed into envelope (if moisture has penetrated the vapor retarder). Warm interior regions and then condenses on a surface that is below air, having the ability to contain more moisture than cold air, the dew point temperature. loses that ability when it comes in contact with cool or cold surfaces or regions. When that happens, excessive moisture Signs of visible surface condensation are water, frost or ice on in the air is released in the form of condensation. In metal windows, doors, frames, ceilings, walls, floor, insulation vapor buildings, there are two possible consequences of trapped retarders, skylights, cold water pipes and/or cooling ducts. To moisture in wall and roof systems: (1) corrosion of metal effectively control visible condensation, it is necessary to reduce components and (2) degradation of the thermal performance of the cold surface areas where condensation may occur. It is also insulation. important to minimize the air moisture content within a building by the use of properly designed ventilating systems. Dew Point and Relative Humidity Dew point is the temperature at which water vapor in any Signs of concealed condensation include damp spots, stains, static or moving air column will condense into water. -
Condensation: Dew, Fog and Clouds •What Is Td? AT350 •What Is the Sat
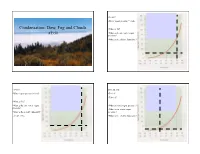
•T=30 C •Water vapor pressure=12mb Condensation: Dew, Fog and Clouds •What is Td? AT350 •What is the sat. water vapor pressure? •What is the relative humidity? •T=30 C POLAR AIR •Water vapor pressure=12mb •T=-2 C •Td=-2 C •What is Td? •What is the sat. water vapor •What is water vapor pressure? pressure? •What is sat. water vapor •What is the relative humidity? pressure? ~12/42~29% •What is the relative humidity? DESERT AIR DESERT AIR •T=35 C •T=35 C •Td= 5 C •Td= 5 C •What is water vapor pressure? •What is water vapor pressure? •What is sat. water vapor •What is sat. water vapor pressure? pressure? •What is the relative humidity? •What is the relative humidity? ~9/56~16% •If air is saturated at T=30 C •If air is saturated at T=30 C and warms to 35 C, what is the and warms to 35 C, what is the relative humidity? relative humidity? ~75% •If air is saturated at T=20 C •If air is saturated at T=20 C and warms to 35 C, what is the and warms to 35 C, what is the relative humidity? relative humidity? ~43% •If air is saturated at T=-20 C •If air is saturated at T=-20 C and warms to 35 C, what is the and warms to 35 C, what is the relative humidity? relative humidity? ~2% Condensation Dew • Surfaces cool strongly at • Condensation is the phase transformation of night by radiative cooling water vapor to liquid water – Strongest on clear, calm nights • Water does not easily condense without a • The dew point is the surface present temperature at which the air is saturated with water – Vegetation, soil, buildings provide surface for vapor dew and -

LESSON CLUSTER 1 States of Water
LESSON CLUSTER 1 States of Water Lesson 1.1: Solid Water and Liquid Water You certainly know about liquid water. That’s what you drink and take showers in. But have you seen any solid water around recently? Of course you have, only you probably called it ice. How do you know that ice is really solid water? Can you show it? You probably can, but there isn’t much time, so you’ll have to hurry! ********* Do Activity 1.1 in your Activity Book ********* Ice and liquid water look and feel different, but they are still the same substance: ice can change to water and water can change to ice. Scientists call these different forms of water STATES. The solid state of water is ice. The liquid state of water is water. Water also exists in a third state a gas called water vapor. We will discuss water vapor in the next lesson. Since solid water (ice), liquid water, and gaseous water (water vapor) can be changed into each other by heating or cooling, that is a good reason to believe that they must be different states of the same substance. Lesson 1.2: Solid. Liquid. and Gas 1 In the last lesson you learned about solid water and liquid water. In this lesson you will learn about the other state of water, the gas called water vapor. Have you ever seen water vapor? The answer is no. You have never seen water vapor, even though it is all around us and you have felt its effects. In order to learn more about water vapor, watch your teacher do Demonstration 1.2.