Determining Pitch Movement from Pitchf/X Data Alan M
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Coaches Drill Book
1 WEBSITES AND VIDEO LINKS If you are looking for more baseball specific coaching information, here are some websites and video links that may help: Websites Baseball Canada NCCP - https://nccp.baseball.ca/ Noblesville Baseball (Indiana) – Drill page - http://www.noblesvillebaseball.org/Default.aspx?tabid=473779 Team Snap - https://www.teamsnap.com/community/skills-drills/category/baseball QC Baseball - http://www.qcbaseball.com/ Baseball Coaching 101 - http://www.baseballcoaching101.com/ Pro baseball Insider - http://probaseballinsider.com/ Video Links Baseball Canada NCCP - https://nccp.baseball.ca/ (use the tools section and select drill library) USA Baseball Academy - http://www.youtube.com/user/USBaseballAcademy Coach Mongero – Winning Baseball - http://www.youtube.com/user/coachmongero IMG Baseball Academy - https://www.youtube.com/watch?v=b-NuHbW38vc&list=PLuLT- JCcPoJnl82I_5NfLOLneA2j3TkKi Baseball Manitoba Sport Development Programs: The Rally Cap program will service the 4 – 7 My First Pitch is a program targeted at the age group, and involves three teams of six development of pitchers entering the 11U players that meet at the park at the same time. division where pitching is introduced for the first time. Grand Slam is the follow-up program to Rally The Mosquito Monster Mania is a fun one day Cap and is meant for players aged 8 and 9. event for Mosquito “A” teams and players that The season ends with a Regional Jamboree are not competing in League or regional and a Provincial Jamboree at Shaw Park in championship. July. The Spring Break Baseball Camp for ages 6- The Winter Academy is a baseball skill 12 runs for one week, offering complete skill development camp to prepare for the season development. -

Jan-29-2021-Digital
Collegiate Baseball The Voice Of Amateur Baseball Started In 1958 At The Request Of Our Nation’s Baseball Coaches Vol. 64, No. 2 Friday, Jan. 29, 2021 $4.00 Innovative Products Win Top Awards Four special inventions 2021 Winners are tremendous advances for game of baseball. Best Of Show By LOU PAVLOVICH, JR. Editor/Collegiate Baseball Awarded By Collegiate Baseball F n u io n t c a t REENSBORO, N.C. — Four i v o o n n a n innovative products at the recent l I i t y American Baseball Coaches G Association Convention virtual trade show were awarded Best of Show B u certificates by Collegiate Baseball. i l y t t nd i T v o i Now in its 22 year, the Best of Show t L a a e r s t C awards encompass a wide variety of concepts and applications that are new to baseball. They must have been introduced to baseball during the past year. The committee closely examined each nomination that was submitted. A number of superb inventions just missed being named winners as 147 exhibitors showed their merchandise at SUPERB PROTECTION — Truletic batting gloves, with input from two hand surgeons, are a breakthrough in protection for hamate bone fractures as well 2021 ABCA Virtual Convention See PROTECTIVE , Page 2 as shielding the back, lower half of the hand with a hard plastic plate. Phase 1B Rollout Impacts Frontline Essential Workers Coaches Now Can Receive COVID-19 Vaccine CDC policy allows 19 protocols to be determined on a conference-by-conference basis,” coaches to receive said Keilitz. -

Analysis of Softball Pitching (PDF)
1 Softball Pitching Technique Marion J.L. Alexander, PhD. Carolyn Taylor, MSc Sport Biomechanics Laboratory Faculty of Kinesiology and Recreation Management University of Manitoba Softball Pitching Technique Softball pitching is the most important skill in the game of softball, as the pitcher can dominate as no other player is able to do. Softball is usually a low scoring game in which only one or two runs are scored during the entire game, often due to the dominance of a highly skilled pitcher. Pitchers require several years to perfect their technique and gain control over the speed and direction of their pitches. Softball pitchers use an underhand motion that is not as stressful to the shoulder joint as the overhand pitch used in baseball. Softball pitchers can often pitch several games in one day, and often have an extended career of many years due to the lower stress levels on the shoulder joint. A softball pitcher may pitch as many as six 7-inning games during a weekend tournament; and often the best pitcher on a college team pitches most, if not all of the games each season (Werner, Guido et al. 2005). This may result in approximately 1200-1500 pitches being thrown in a 3-day period for a windmill pitcher, as compared to 100-150 for a baseball pitcher (Werner, Guido et al. 2005). The softball pitch is a relatively simple motion, consisting of a step forward from the mound onto the foot on the non pitching arm side, weight shift onto this foot, and rotation of the shoulders and trunk to a position facing the batter. -

Describing Baseball Pitch Movement with Right-Hand Rules
Computers in Biology and Medicine 37 (2007) 1001–1008 www.intl.elsevierhealth.com/journals/cobm Describing baseball pitch movement with right-hand rules A. Terry Bahilla,∗, David G. Baldwinb aSystems and Industrial Engineering, University of Arizona, Tucson, AZ 85721-0020, USA bP.O. Box 190 Yachats, OR 97498, USA Received 21 July 2005; received in revised form 30 May 2006; accepted 5 June 2006 Abstract The right-hand rules show the direction of the spin-induced deflection of baseball pitches: thus, they explain the movement of the fastball, curveball, slider and screwball. The direction of deflection is described by a pair of right-hand rules commonly used in science and engineering. Our new model for the magnitude of the lateral spin-induced deflection of the ball considers the orientation of the axis of rotation of the ball relative to the direction in which the ball is moving. This paper also describes how models based on somatic metaphors might provide variability in a pitcher’s repertoire. ᭧ 2006 Elsevier Ltd. All rights reserved. Keywords: Curveball; Pitch deflection; Screwball; Slider; Modeling; Forces on a baseball; Science of baseball 1. Introduction The angular rule describes angular relationships of entities rel- ative to a given axis and the coordinate rule establishes a local If a major league baseball pitcher is asked to describe the coordinate system, often based on the axis derived from the flight of one of his pitches; he usually illustrates the trajectory angular rule. using his pitching hand, much like a kid or a jet pilot demon- Well-known examples of right-hand rules used in science strating the yaw, pitch and roll of an airplane. -

Name of the Game: Do Statistics Confirm the Labels of Professional Baseball Eras?
NAME OF THE GAME: DO STATISTICS CONFIRM THE LABELS OF PROFESSIONAL BASEBALL ERAS? by Mitchell T. Woltring A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Science in Leisure and Sport Management Middle Tennessee State University May 2013 Thesis Committee: Dr. Colby Jubenville Dr. Steven Estes ACKNOWLEDGEMENTS I would not be where I am if not for support I have received from many important people. First and foremost, I would like thank my wife, Sarah Woltring, for believing in me and supporting me in an incalculable manner. I would like to thank my parents, Tom and Julie Woltring, for always supporting and encouraging me to make myself a better person. I would be remiss to not personally thank Dr. Colby Jubenville and the entire Department at Middle Tennessee State University. Without Dr. Jubenville convincing me that MTSU was the place where I needed to come in order to thrive, I would not be in the position I am now. Furthermore, thank you to Dr. Elroy Sullivan for helping me run and understand the statistical analyses. Without your help I would not have been able to undertake the study at hand. Last, but certainly not least, thank you to all my family and friends, which are far too many to name. You have all helped shape me into the person I am and have played an integral role in my life. ii ABSTRACT A game defined and measured by hitting and pitching performances, baseball exists as the most statistical of all sports (Albert, 2003, p. -
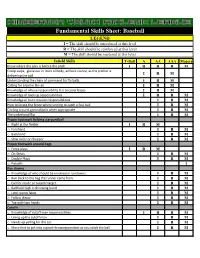
Fundamental Skills Sheet: Baseball
Fundamental Skills Sheet: Baseball LEGEND I = The skill should be introduced at this level R = The skill should be reinforced at this level M = The skill should be mastered at this level Infield Skills T-Ball A AA AAA Majors Know where the play is before the pitch I R R R M Creep steps, glove out in front of body, athletic stance, as the pitcher is I R M delivering the ball Understanding the chain of command for fly balls I R M Calling for a ball in the air I R M Knowledge of whose responsibility it is to cover bases I R M Knowledge of back up responsibilities I R R M Knowledge of bunt rotation responsibilities I R M How to locate the fence when running to catch a foul ball I R M Circling around ground balls when appropriate I R M The underhand flip I R M Proper footwork fielding a groundball o Right at the fielder I R M o Forehand I R M o Backhand I R M o Slow roller or chopper I R M Proper footwork around bags o Force plays I R M o On Steals I R M o Double Plays I R M o Pickoffs I Run downs o Knowledge of who should be involved in rundowns I R M o Run back to the bag the runner came from I R M o Call for inside or outside target I R M o Ball held high in throwing hand I R M o Limit pump fakes I R M o Follow throw I R M o Tag with two hands I R M Cutoffs o Knowledge of cutoff man responsibilities I R R M o Lining up the cutoff man I R M o Hands up yelling for the cut I R M o Move feet to get into a good throwing position as you catch the ball I R M Outfield Skills T-Ball A AA AAA Majors Know where the play is before the pitch I R R R -

Coaching Manual
The East Torrens Coaches Manual is a resource designed for use by coaches and players to gain a comprehensive understanding of the philosophies, skills and plays of the East Torrens Baseball Club. This manual should be used by teams from T-Ball right through to Division One and provides the guidance and support in order to develop the best possible baseball players and coaches we can. The aim of this manual is not to create robots but sound baseball players and coaches who have a passion for the game and a desire to be the best baseball person they can. To achieve this, the East Torrens Coaching Manual provides information to coaches focusing on how athletes learn and develop, a breakdown of fundamental skills to help improve your players and detailed instruction on key elements on the mental aspect of baseball, so everyone can raise their baseball IQ. The key to the manual is that every player and coach in the club needs to know the contents and have an understanding on how to apply it. As a coach it is up to you to ensure all the players are able to execute all aspects of the manual and when in doubt regarding content please seek clarification from the senior coaching staff. This manual however, will not enforce how you chose to run a game. This is up to you as a coach and your individual baseball philosophy. This manual hopefully is the bases for that philosophy and the attributes we want in all our players and coaches. This manual will always be evolving just like the game of baseball itself. -

House-Ch-5-Flext Elbow Position at Release.Pdf
No one pitch, thrown properly, puts any more stress on the arm than any other pitch." Alan Blitzblau, Biomechanist The Pitching Edge crxratt....-rter hen I first heard Alan Blitzblau's remark on the previous page, 1 was more than a little skeptical. He had to be wrong. For many W years, I, like everyone else, had been telling parents of Little Leagu- ers that their youngsters should not throw curveballs, that curveballs were bad for a young arm. "Now wait a minute," I said, "you've just dis- counted what's been taught to young pitchers all over the United States. Are you sure?" "I'm sure," he responded. Alan sat down in front of the computer and showed me what he had discovered. From foot to throw- ing elbow, every pitch has exactly the same neuromuscular sequencing. The only body segments that change when a different type of pitch is thrown are the forearm, wrist, hand, and fingers, and they change only in angle. Arm speed is the same, the arm's external rotation into launch is the same, and pronation during deceleration is the same. It is the differ- ent angles of the forearm, wrist, hand, and fingers that alter velocity, rota- tion, and flight of a ball. He also revealed another surprise. The grip of a pitch is secondary to this angle, and all pitches leave the middle finger last! This was blasphemy I was stunned. But Alan wasn't finished. "Tom, for every one-eighth inch the middle finger misses the release point when the arm snaps straight at launch, it (the ball) is eight inches off location at home plate So throwing strikes means getting the middle finger to a quarter-sized spot on the middle of the baseball with every pitch." Wow! This chapter will dispel myths about what happens to pitcher's elbows, forearms, wrists, and fingers at release point, For years, pitching coaches (me included) taught pitchers to "pull" their glove-side elbow to their hip when throwing. -

Give Me Your Tired, Your Poor, Your Fastball Pitchers Yearning for Strike Three: How Baseball Diplomacy Can Revitalize Major
American University International Law Review Volume 14 | Issue 6 Article 3 1999 Give Me Your Tired, Your Poor, Your Fastball Pitchers Yearning for Strike Three: How Baseball Diplomacy Can Revitalize Major League Baseball and United States-Cuba Relations Matthew .N Greller Follow this and additional works at: http://digitalcommons.wcl.american.edu/auilr Part of the International Law Commons Recommended Citation Greller, Matthew A. "Give Me Your Tired, Your Poor, Your Fastball Pitchers Yearning for Strike Three: How Baseball Diplomacy Can Revitalize Major League Baseball and United States-Cuba Relations." American University International Law Review 14, no. 6 (1999): 1647-1713. This Article is brought to you for free and open access by the Washington College of Law Journals & Law Reviews at Digital Commons @ American University Washington College of Law. It has been accepted for inclusion in American University International Law Review by an authorized administrator of Digital Commons @ American University Washington College of Law. For more information, please contact [email protected]. GIvE ME YOUR TIRED, YOUR POOR, YOUR FASTBALL PITCHERS YEARNING FOR STRIKE THREE:' How BASEBALL DIPLOMACY CAN REVITALIZE MAJOR LEAGUE BASEBALL AND UNITED STATES-CUBA RELATIONS MATTHEW N. GRELLER* INTRODUCTION ............................................. 1648 I. THE BASE-PATH: How UNITED STATES IMMIGRATION LAWS AND MLB RULES INTERACT To ALLOW FOREIGN BASEBALL PLAYERS To COMPETE IN THE UNITED STATES ............... 1655 A. THE "0" VISA CATEGORY ................................ 1656 B. THE "P" VISA CATEGORY ................................ 1659 C. THE "MLB" CATEGORY .................................. 1661 II. LA MANERA CUBANA - "THE CUBAN WAY" - HOW CUBAN PLAYERS COME TO THE UNITED STATES ... 1666 A. THE RENE AROCHA MODEL .............................. 1668 B. -

Pitching Grips
Pitching Grips Pitch #1 – Four Seam Fastball The four seam fastball is a pitcher’s bread and butter pitch. It is the pitch you can throw the hardest and with the best control. Place your index and middle fingertips directly on the perpendicular seam of the baseball. The “horseshoe seam” should face into your ring finger of your throwing hand. Next, place your thumb directly beneath the baseball, resting on the smooth leather. Grip this pitch softly, like an egg, in your fingertips. A loose grip minimizes friction between your hand and the baseball. Less friction = more velocity. Pitch #2 – Change-up This pitch is important because: “hitting is timing and pitching is interrupting that timing.” Pitchers must throw a change-up to keep hitters honest, otherwise they will tee off on the fastball. Hold the ball deep in the palm. Circle around the ball with the hand. Use same mechanics as the fastball – except lengthen the stride and drag the back foot. BaseballTutorials.com 1 Pitch #3 – Cut Fastball While the four seam fastball is more or less a straight pitch, the cut fastball has late break toward the glove side of the pitcher. Start with a four-seam fastball grip, and move your top two fingers slightly off center. The arm motion and arm speed for the cutter are just like for a fastball. At the point of release, with the grip slightly off center and pressure from the middle finger, turn your wrist ever so lightly. This off center grip and slight turn of the wrist will result into a pitch with lots of velocity and a late downward break. -

Sinker Most Effective on the ADI and VMI Scale? by Clifton Neeley
When is the Sinker Most Effective on the ADI and VMI Scale? by Clifton Neeley www.baseballvmi.com Since we can divide MLB data into performance categories that show how much ball movement the pitcher had purely from the makeup of the air, we can see the pitcher’s performance against the ADI. We can also see the hitter’s performance when the ball is moving more and when the hitter is not used to the movement vs when he is comfortable in the climate. It gets very intriguing when we include different types of pitches within that same grid. You can do a similar study on the pitcher and hitter stats on our website, but you may glean some good information from our study on the “Pitch-Mix.” Sinker - Used (7%) League Wide Average Hit/Strike Rate For 2016 =11.02% "Reverse" pitcher throws the Sinker or Two-Seamer far more often than the traditional four-seamer The Sinker is another pitch, which if used in more than 20% of the total pitches thrown by the starting pitcher, identifies him as a Reverse Pitcher. If you note that the pitcher your hitting team or player is matched up against in today's or tomorrow's game is prone to throwing a high number of Sinkers, then he will be more successful against a High Plus VMI team than a High Minus VMI team with that pitch. A "Reverse" pitcher is one who throws a Sinker above 90 mph as one of his primary two pitches. So, a High Plus team will be more successful against a Tight Pitcher and a High Minus team will be more successful against a Reverse Pitcher. -

How to Grip and Throw a Four Seam Fastball
How To Grip And Throw A Four Seam Fastball Four-seam fastball To grip the four seam fastball, place your index and middle fingertips directly on the perpendicular seam of the baseball. The "horseshoe seam" should face into your ring finger of your throwing hand (as shown in the picture on the left). I call it the horseshoe seam simply because the seam itself looks like the shape of a horseshoe. Next, place your thumb directly beneath the baseball, resting on the smooth leather (as shown in the picture on the right). Ideally, you should rest your thumb in the center of the horseshoe seam on the bottom part of the baseball. Grip this pitch softly, like an egg, in your fingertips. There should be a "gap" or space between the ball and your palm (as shown in the middle picture). This is the key to throwing a good, hard four-seam fastball with maximal backspin and velocity: A loose grip minimizes "friction" between your hand and the baseball. The less friction, of course, the quicker the baseball can leave your hand. Does a four-seam fastball rise? "No," says Bill James, author of the The Neyer/James Guide to Pitchers. "A fastball can't rise unless it's thrown underhand. But if you throw the fastball overhand with enough force, it will appear to rise because it's not dropping as much as the batter's brain thinks it should." Page 1 of 10 How To Grip And Throw A Two Seam Fastball Two seam fastball A two seam fastball, much like a sinker or cutter (cut fastball), is gripped slightly tighter and deeper in the throwing-hand than the four-seam fastball.