Paper, a Practical Research in This Field Is Described Based on the Development of SIMACOP ©
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Is -Open Source- a Keyword for a Successful Gis Development ?
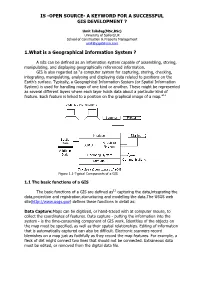
IS -OPEN SOURCE- A KEYWORD FOR A SUCCESSFUL GIS DEVELOPMENT ? Umit Isikdag(MSc,BSc) University of Salford,UK School of Construction & Property Management [email protected] 1.What is a Geographical Information System ? A GIS can be defined as an information system capable of assembling, storing, manipulating, and displaying geographically referenced information. GIS is also regarded as “a computer system for capturing, storing, checking, integrating, manipulating, analysing and displaying data related to positions on the Earth's surface. Typically, a Geographical Information System (or Spatial Information System) is used for handling maps of one kind or another. These might be represented as several different layers where each layer holds data about a particular kind of feature. Each feature is linked to a position on the graphical image of a map.”12 Figure 1.1-Typical Components of a GIS 1.1 The basic functions of a GIS The basic functions of a GIS are defined as13 capturing the data,integrating the data,projection and registration,sturucturing and modelling the data.The USGS web site(http://www.usgs.gov) defines these functions in detail as: Data Capture:Maps can be digitized, or hand-traced with at computer mouse, to collect the coordinates of features. Data capture - putting the information into the system - is the time-consuming component of GIS work. Identities of the objects on the map must be specified, as well as their spatial relationships. Editing of information that is automatically captured can also be difficult. Electronic scanners record blemishes on a map just as faithfully as they record the map features. -

Experience with a Livecd in an Education Process
EXPERIENCE WITH A LIVECD IN AN EDUCATION PROCESS Experience with a LiveCD in an education process Jan R˚uˇziˇcka, FrantiˇsekKl´ımek Institute of Geoinformatics Faculty of Mining and Geology, VSB-TUO E-mail: [email protected] Key words: LiveCD, GIS´akLiveCD, Distance Learning, E-learning Abstract The paper describes how can be LiveCD (Bootable CD) used for geoinformatics distance learn- ing. We have prepared one LiveCD with basic software for learning geoinformatics and we have some feedback from users and teachers. The paper should evaluate this feedback. LiveCD is a CD-ROM, that can be used as a bootable device. After booting from the CD, the user can access all resources compiled to the CD. There are operating system (usually based on GNU/Linux) and (user, desktop) software installed and configured to be used directly after boot. Our CD named GIS´akLiveCD contains basic GIS software such as UMN MapServer, GRASS, Quantum GIS, Thuban, JUMP, GPS Drive, Blender and we work on other soft- ware packages such as MapLab for UMN MapServer, PostGIS, GeoNetwork Open Source, CatMDEdit, gvSIG, uDIG. GIS´akLiveCD contains set of spatial data from the Czech Re- public. Main part of the CD are tutorials for GIS software. CD is open for other e-learning materials. Now we have about 20 students using our LiveCD and few other users that are not curently our students. The paper should show Pros & Cons of the LiveCD usage for a distance learning. LiveCD Live CD is bootable CD-ROM with operating system and installed and configured programs. It is ready to use as full installed system directly after boot from CD-ROM drive. -

Pipenightdreams Osgcal-Doc Mumudvb Mpg123-Alsa Tbb
pipenightdreams osgcal-doc mumudvb mpg123-alsa tbb-examples libgammu4-dbg gcc-4.1-doc snort-rules-default davical cutmp3 libevolution5.0-cil aspell-am python-gobject-doc openoffice.org-l10n-mn libc6-xen xserver-xorg trophy-data t38modem pioneers-console libnb-platform10-java libgtkglext1-ruby libboost-wave1.39-dev drgenius bfbtester libchromexvmcpro1 isdnutils-xtools ubuntuone-client openoffice.org2-math openoffice.org-l10n-lt lsb-cxx-ia32 kdeartwork-emoticons-kde4 wmpuzzle trafshow python-plplot lx-gdb link-monitor-applet libscm-dev liblog-agent-logger-perl libccrtp-doc libclass-throwable-perl kde-i18n-csb jack-jconv hamradio-menus coinor-libvol-doc msx-emulator bitbake nabi language-pack-gnome-zh libpaperg popularity-contest xracer-tools xfont-nexus opendrim-lmp-baseserver libvorbisfile-ruby liblinebreak-doc libgfcui-2.0-0c2a-dbg libblacs-mpi-dev dict-freedict-spa-eng blender-ogrexml aspell-da x11-apps openoffice.org-l10n-lv openoffice.org-l10n-nl pnmtopng libodbcinstq1 libhsqldb-java-doc libmono-addins-gui0.2-cil sg3-utils linux-backports-modules-alsa-2.6.31-19-generic yorick-yeti-gsl python-pymssql plasma-widget-cpuload mcpp gpsim-lcd cl-csv libhtml-clean-perl asterisk-dbg apt-dater-dbg libgnome-mag1-dev language-pack-gnome-yo python-crypto svn-autoreleasedeb sugar-terminal-activity mii-diag maria-doc libplexus-component-api-java-doc libhugs-hgl-bundled libchipcard-libgwenhywfar47-plugins libghc6-random-dev freefem3d ezmlm cakephp-scripts aspell-ar ara-byte not+sparc openoffice.org-l10n-nn linux-backports-modules-karmic-generic-pae -
Location Based Authentication
University of New Orleans ScholarWorks@UNO University of New Orleans Theses and Dissertations Dissertations and Theses 5-20-2005 Location Based Authentication Seema Sharma University of New Orleans Follow this and additional works at: https://scholarworks.uno.edu/td Recommended Citation Sharma, Seema, "Location Based Authentication" (2005). University of New Orleans Theses and Dissertations. 141. https://scholarworks.uno.edu/td/141 This Thesis is protected by copyright and/or related rights. It has been brought to you by ScholarWorks@UNO with permission from the rights-holder(s). You are free to use this Thesis in any way that is permitted by the copyright and related rights legislation that applies to your use. For other uses you need to obtain permission from the rights- holder(s) directly, unless additional rights are indicated by a Creative Commons license in the record and/or on the work itself. This Thesis has been accepted for inclusion in University of New Orleans Theses and Dissertations by an authorized administrator of ScholarWorks@UNO. For more information, please contact [email protected]. LOCATION BASED AUTHENTICATION A Thesis Submitted to the Graduate Faculty of the University of New Orleans in partial fulfillment of the requirements for the degree of Master of Science in The Department of Computer Science by Seema Rani Sharma B.E. University of Pune, India, 2002 May 2005 ACKNOWLEDGEMENTS No Herculean task is consummated without the support and contribution from a number of individuals and that is the very essence of any colossal scheme. These few paragraphs are an effort to optimize my gratitude towards all those who helped me complete my thesis successfully. -

GRASS/ Osgeo-News Open Source GIS and Remote Sensing Information Volume 4, December 2006
GRASS/ OSGeo-News Open Source GIS and Remote Sensing information Volume 4, December 2006 Editorial reaching a larger audience, as well as maintain a sin- gle high quality newsletter, the editors have decided by Tyler Mitchell to re-brand it as an OSGeo-News production. I have always been encouraged by the content, layout and Dear GRASS and other open source users, ideas represented by the GRASS-News volumes and hope to see it continue. It is my pleasure to introduce the future expan- sion of GRASS-News. The next edition will be morphed into a broader Open Source Geospatial Call For Articles Newsletter covering projects from the OSGeo Foun- dation and beyond. The aim is to bring relevant news You can help by providing articles or papers for pub- and articles to a larger audience by widening the fo- lication. The next edition of this newsletter will have cus and changing the name. articles that cover several other open source projects GRASS-News has always covered more than just in various topics: GRASS. It has also shown itself to be a high quality • OSGeo-related news items production that we can be proud of reading or even printing to share with friends. With the potential of • ... continues on next page ... Contents of this volume: Simultaneous simulation of hydrological and carbon cycle processes in a GIS framework . 13 Editorial ...................... 1 r.roughness – a new tool for morphometric GRASS-News Editorial .............. 2 analysis in GRASS ............... 17 FOSS4G 2006 Conference: The meeting of the Resampling SRTM 03”-data with kriging ... 20 tribes ...................... -

Porting Meego to LEON
#orting $eeGo to LE&' Master of Science Thesis ()A' *ERT&'A Chalmers University of Technology University of Gothenburg Department of Computer Science and Engineering Göteborg, Sweden, August !"" The Author grants to Chalmers University of Technology and University of Gothenburg the non-e-clusive right to publish the .or/ electronically and in a non-commercial purpose make it accessible on the (nternet0 The Author warrants that he1she is the author to the .ork, and warrants that the .or/ does not contain te-t, pictures or other material that violates copyright law0 The Author shall, when transferring the rights of the .or/ to a third party 2for e-ample a publisher or a company3, ac/nowledge the third party about this agreement0 (f the Author has signed a copyright agreement with a third party regarding the .ork, the Author warrants hereby that he1she has obtained any necessary permission from this third party to let Chalmers University of Technology and University of Gothenburg store the .or/ electronically and make it accessible on the (nternet0 #orting $eeGo to %E&' (van *ertona 4 (van *ertona, August !""0 E-aminer5 Arne Dahlberg Chalmers University of Technology University of Gothenburg Department of Computer Science and Engineering SE-6" 78 Göteborg Sweden Telephone 9 68 2!3:",;; "!!! Department of Computer Science and Engineering Göteborg, Sweden, August !"" POLITECNICO DI TORINO III Faculty of Information Engineering Master of Science in Computer Engineering Master Thesis Porting MeeGo To LEON Supervisor: Bartolomeo Montrucchio Candidate: Ivan Bertona August 2011 Abstract Portable multimedia devices are the flagship of a steadily growing market, from which the LEON/GRLIB hardware platform was excluded due to the lack of suitable software support. -

GNU MANUALINUX 6.8 This (Manual) Is Free and Is Realized Also with Collaboration of Others Passionated (THANKS !!!)
Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published by the Free Software Foundation. A copy of the license is included in the section entitled "GNU Free Documentation License". Copyright (c) 2001-2008 Cristiano Macaluso (aka Panther) E' garantito il permesso di copiare, distribuire e/o modificare questo documento seguendo i termini della Licenza per Documentazione Libera GNU, Versione 1.2 o ogni versione successiva pubblicata dalla Free Software Foundation. Una copia della licenza è acclusa in fondo al documento nella sezione intitolata "GNU Free Documentation License". GNU MANUALINUX 6.8 This (Manual) is free and is realized also with collaboration of others passionated (THANKS !!!). Last update on October 6 2008 version: 6.8 Manualinux Homepage: http://www.manualinux.com http://www.manualinux.it http://www.manualinux.eu http://www.manualinux.in http://www.manualinux.cn http://www.manualinux.org http://www.manualinux.net http://www.manualinux.tk DO YOU WANT TO MODIFY OR INSERT OTHER ARTICLES ? WRITE ME ! EMAIL: [email protected] (Cristiano Macaluso). NEWS OF THE VERSION 6.8 Modified 38b)INSTALL SLAX ON HARD-DISK AND ON USB STICK Modified 3c)CREATE AND BURN CD AND DVD MENU' Page a)COMMANDS 2 b)UTILITY 2 c)PROGRAMS 3 d)KERNEL 4 e)NETWORKING 4 f)OTHER 5 GNU Free Documentation License 151 DO YOU WANT ADD / MODIFY OTHER ARGUMENTS ??? WRITE ME !!! 1 COMMANDS Page 1a)COMMON COMMANDS TO MOVE FIRST STEPS ON LINUX 5 2a)DIFFERENT COMMANDS -
Open Source Software
Linux-Lösungen für Linux-Anwender Tom Schwaller Technical Director, Linux Solutions Group e.V. Tom Schwaller Linux Solutions Group e.V. Dipl. Math ETH Breitscheidstr. 4 Linux IT Architect 70174 Stuttgart Technical Director Telefon (0711) 90715 – 390 Telefax (0711) 90715 – 350 Mobil - - - www.lisog.org [email protected] 4. Augsburger Linux-Infotag 2005 - 09.04.2005 1 Linux Solutions Group e.V. - Linuxbasiertes Business fördern! Agenda ● Verbreitung von Open Source Software ● Das Architektur-Dilemma – Sourceforge, wir haben ein Problem! ● Architektur-Beispiele ● Universal Enterprise Architecture ● Linux Solutions Group e.V. (LiSoG) 2 Linux Solutions Group e.V. - Linuxbasiertes Business fördern! Was haben diese beiden Personen gemeinsam? Bill Gates Tom Schwaller Geboren am 28. Oktober! 3 Linux Solutions Group e.V. - Linuxbasiertes Business fördern! Und was verbindet diese beiden Personen? Linus Torvalds Amelie Schwaller Geboren am 28. Dezember! 4 Linux Solutions Group e.V. - Linuxbasiertes Business fördern! Verbreitung von Open Source Software 5 Linux Solutions Group e.V. - Linuxbasiertes Business fördern! Einsatz von Open Source Software Welche Produkte setzen Sie ein oder planen Sie einzusetzen? Linux 100% Apache 75% MySQL 52% Tomcat 44% Perl/PHP/Python 39% SAMBA 38% OpenOffice 24% JBoss 21% Struts 18% Eclipse 18% Base: 85 North American firms that use open source (multiple responses accepted) Source: Forrester Research, Inc. John R. Rymer, Vice President, August 4, 26 004 Linux Solutions Group e.V. - Linuxbasiertes Business fördern! Forrester: Open Source Enterprise Viability Linux is ready for the Enterprise ! Source: Forrester Research, Inc., Q3 2003 7 Linux Solutions Group e.V. - Linuxbasiertes Business fördern! Von der OSS-Infrastruktur zum Business Prozess Open Source lässt sich nicht künstlich in Nischen zwängen! 8 Linux Solutions Group e.V. -

* His Is the Original Ubuntuguide. You Are Free to Copy This Guide but Not to Sell It Or Any Derivative of It. Copyright Of
* his is the original Ubuntuguide. You are free to copy this guide but not to sell it or any derivative of it. Copyright of the names Ubuntuguide and Ubuntu Guide reside solely with this site. This guide is neither sold nor distributed in any other medium. Beware of copies that are for sale or are similarly named; they are neither endorsed nor sanctioned by this guide. Ubuntuguide is not associated with Canonical Ltd nor with any commercial enterprise. * Ubuntu allows a user to accomplish tasks from either a menu-driven Graphical User Interface (GUI) or from a text-based command-line interface (CLI). In Ubuntu, the command-line-interface terminal is called Terminal, which is started: Applications -> Accessories -> Terminal. Text inside the grey dotted box like this should be put into the command-line Terminal. * Many changes to the operating system can only be done by a User with Administrative privileges. 'sudo' elevates a User's privileges to the Administrator level temporarily (i.e. when installing programs or making changes to the system). Example: sudo bash * 'gksudo' should be used instead of 'sudo' when opening a Graphical Application through the "Run Command" dialog box. Example: gksudo gedit /etc/apt/sources.list * "man" command can be used to find help manual for a command. For example, "man sudo" will display the manual page for the "sudo" command: man sudo * While "apt-get" and "aptitude" are fast ways of installing programs/packages, you can also use the Synaptic Package Manager, a GUI method for installing programs/packages. Most (but not all) programs/packages available with apt-get install will also be available from the Synaptic Package Manager. -

Strong Dependencies Between Software Components
Specific Targeted Research Project Contract no.214898 Seventh Framework Programme: FP7-ICT-2007-1 Technical Report 0002 MANCOOSI Managing the Complexity of the Open Source Infrastructure Strong Dependencies between Software Components Pietro Abate ([email protected]) Jaap Boender ([email protected]) Roberto Di Cosmo ([email protected]) Stefano Zacchiroli ([email protected]) Universit`eParis Diderot, PPS UMR 7126, Paris, France May 24, 2009 Web site: www.mancoosi.org Contents 1 Introduction . .2 2 Strong dependencies . .3 3 Strong dependencies in Debian . .7 3.1 Strong vs direct sensitivity: exceptions . .9 3.2 Using strong dominance to cluster data . 11 3.3 Debian is a small world . 11 4 Efficient computation . 12 5 Applications . 13 6 Related works . 16 7 Conclusion and future work . 17 8 Acknowledgements . 18 A Case Study: Evaluation of debian structure . 21 Abstract Component-based systems often describe context requirements in terms of explicit inter-component dependencies. Studying large instances of such systems|such as free and open source software (FOSS) distributions|in terms of declared dependencies between packages is appealing. It is however also misleading when the language to express dependencies is as expressive as boolean formulae, which is often the case. In such settings, a more appropriate notion of component dependency exists: strong dependency. This paper introduces such notion as a first step towards modeling semantic, rather then syntactic, inter-component relationships. Furthermore, a notion of component sensitivity is derived from strong dependencies, with ap- plications to quality assurance and to the evaluation of upgrade risks. An empirical study of strong dependencies and sensitivity is presented, in the context of one of the largest, freely available, component-based system. -

Final Report
Automotive Computing with Game Console Hardware Pat Suwalski (294246) 2005 Supervisor: Professor G. Wainer Department of Systems and Computer Engineering Faculty of Engineering Carleton University April 2005 Abstract This project describes a general-purpose automotive computer based on the Microsoft Xbox game console. Several components that can be used to con- struct a general-purpose automotive computer are designed and implemented. While current solutions are likely to use a highly-integrated and simple client, this project proposes the concept of a fully-functional mobile server. Consider- ation of safety and usability research throughout the design results in a unique product. Contents 1 Introduction 1 1.1 DashBox . 1 1.2 Microsoft Xbox . 3 1.3 System Overview . 4 1.4 Report Organization . 6 2 Software Design 7 2.1 DashUI . 7 2.1.1 Secondary Window Manager . 8 2.1.2 Simple Configuration . 9 2.1.3 Usability . 10 2.1.4 Program Design . 10 2.2 Vehicle State Daemon . 11 3 Hardware Design 13 3.1 Power Control Unit . 13 3.2 Binary State Sensor . 18 3.3 Miscellaneous Hardware . 19 3.3.1 USB Dongle . 19 3.3.2 VGA Adapter . 21 4 Human Factors & Safety 22 4.1 Hardware Interaction Concerns . 23 4.2 Software Interaction Concerns . 25 5 Results 27 5.1 Touch-screen Interface . 27 5.2 Usable Software . 29 5.3 Other Peripherals . 30 5.4 Web Page . 31 i 6 Conclusions 32 A ATTiny2313 Introductory Material 35 B Weblog 40 ii List of Figures 1.1 DashBox Logo . 2 1.2 Microsoft Xbox . -

Linux on the Psion Netbook HOWTO Last Modified 9 July 2006
Linux on the Psion netBook HOWTO Last modified 9 July 2006. Changes. Copyright © 2003-2005 www.openpsion.org (http://www.openpsion.org) - The OpenPsion Project. All rights reserved. This document contains information on how to get a Psion netBook to boot up the Linux operating system, how to subsequently configure the system, and how to obtain, install and use applications suitable for the netBook’s limited resources. This document also contains notes on the remaining problems at the moment, and instructions on such things as compiling a custom kernel and assembling a custom OS.IMG file. Framebuffer support is implemented, and X windows is supported. Compactflash, PCMCIA, and touch screen are rudimentarily supported. Many wireless PCMCIA cards will work fine; indeed, in general most PCMCIA devices (16-bit PC Card only!) will work fine. The touchscreen patch is relatively new. The only hold up to a fully functional, operational linbook seems to be that no power management is available (you can’t turn the linBook off!). There is no support for sound yet. Other useful hints may be found on the Linux on Psion 5MX HOWTO (http://linux-7110.sourceforge.net/howtos/series5mx_new/index.htm). The netBook and 5MX systems have considerable similarity. Offer (May 2006): An infrared modem is offered for free (shipped anywhere in the world) to anyone who posts a patch for the netbook kernel that enables infrared. However, a patch for proper PCMCIA support is considered more critical and will take precedence if posted prior to, or within a few days of, the infrared patch. Please send inquiries or patches to the OpenPsion mail list.