Lights and Shadows in Evolutionary Deep Learning: Taxonomy, Critical Methodological Analysis, Cases of Study, Learned Lessons, Recommendations and Challenges
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Politico-Social History of Algolt (With a Chronology in the Form of a Log Book)
A Politico-Social History of Algolt (With a Chronology in the Form of a Log Book) R. w. BEMER Introduction This is an admittedly fragmentary chronicle of events in the develop ment of the algorithmic language ALGOL. Nevertheless, it seems perti nent, while we await the advent of a technical and conceptual history, to outline the matrix of forces which shaped that history in a political and social sense. Perhaps the author's role is only that of recorder of visible events, rather than the complex interplay of ideas which have made ALGOL the force it is in the computational world. It is true, as Professor Ershov stated in his review of a draft of the present work, that "the reading of this history, rich in curious details, nevertheless does not enable the beginner to understand why ALGOL, with a history that would seem more disappointing than triumphant, changed the face of current programming". I can only state that the time scale and my own lesser competence do not allow the tracing of conceptual development in requisite detail. Books are sure to follow in this area, particularly one by Knuth. A further defect in the present work is the relatively lesser availability of European input to the log, although I could claim better access than many in the U.S.A. This is regrettable in view of the relatively stronger support given to ALGOL in Europe. Perhaps this calmer acceptance had the effect of reducing the number of significant entries for a log such as this. Following a brief view of the pattern of events come the entries of the chronology, or log, numbered for reference in the text. -

The Legacy of Victor R. Basili
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange About Harlan D. Mills Science Alliance 2005 Foundations of Empirical Software Engineering: The Legacy of Victor R. Basili Barry Boehm Hans Dieter Rombach Marvin V. Zelkowitz Follow this and additional works at: https://trace.tennessee.edu/utk_harlanabout Part of the Physical Sciences and Mathematics Commons Recommended Citation Boehm, Barry; Rombach, Hans Dieter; and Zelkowitz, Marvin V., "Foundations of Empirical Software Engineering: The Legacy of Victor R. Basili" (2005). About Harlan D. Mills. https://trace.tennessee.edu/utk_harlanabout/3 This Book is brought to you for free and open access by the Science Alliance at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in About Harlan D. Mills by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. University of Tennessee, Knoxville Trace: Tennessee Research and Creative Exchange The Harlan D. Mills Collection Science Alliance 1-1-2005 Foundations of Empirical Software Engineering: The Legacy of Victor R.Basili Barry Boehm Hans Dieter Rombach Marvin V. Zelkowitz Recommended Citation Boehm, Barry; Rombach, Hans Dieter; and Zelkowitz, Marvin V., "Foundations of Empirical Software Engineering: The Legacy of Victor R.Basili" (2005). The Harlan D. Mills Collection. http://trace.tennessee.edu/utk_harlan/36 This Book is brought to you for free and open access by the Science Alliance at Trace: Tennessee Research and Creative Exchange. It has been accepted for inclusion in The Harlan D. Mills Collection by an authorized administrator of Trace: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. -
The State of Digital Computer Technology in Europe, 1961
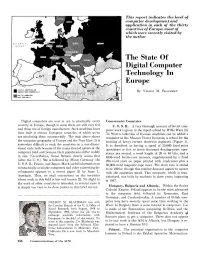
This report indicates the level of computer development and application in each of the thirty countries of Europe, most of which were recently visited by the author The State Of Digital Computer Technology In Europe By NELSON M. BLACHMAN Digital computers are now in use in practically every Communist Countries country in Europe, though in some there are still very few U. S. S.R. A very thorough account of Soviet com- and these are of foreign manufacture. Such machines have puter work is given in the report edited by Willis Ware [3]. been built in sixteen European countries, of which seven To Ware's collection of Russian machines can be added a are producing them commercially. The map above shows computer at the Moscow Power Institute, a school for the the computer geography of Europe and the Near East. It is training of heavy-current electrical engineers (Figure 1). somewhat difficult to rank the countries on a one-dimen- It is described as having a speed of 25,000 fixed-point sional scale both because of the many-faceted nature of the operations or five to seven thousand floating-point oper- computer field and because their populations differ widely ations per second, a word length of 20 or 40 bits, and a in size. Nevertheh~ss, Great Britain clearly comes first 4096-word ferrite-core memory, supplemented by a fixed (after the U. S.). She is followed by (West) Germany, the 256-word store on paper printed with condensers plus a U. S. S. R., France, and Japan. Much useful information on 50,000-word magnetic-tape store. -

Voided Certificate of Employee Information Reports
Public Contracts Equal Employment Opportunity Compliance Monitoring Program Voided Certificate of Employee Information Report Report run on: June 6, 2017 3:22 PM Name of Company Cert Street City State Zip (PC) 2 HD 37407 245 EAST 30TH NEW YORK CITY NY 10016 1515 BOARDWALK, INC 18317 121 WASHINGTON ST TOMS RIVER NJ 08753 174 NEWARK AVENUE ASSOCIATES, LP 34742 103 EISENHOWER PARKWAY ROSELAND NJ 07068 1993-N2 PROPERTIES, NO. 3 LIMITED PARTNERSHI 19621 12100 WILSHIRE BLVD LOS ANGELES CA 90025 1ST CALL PAINTING CONTRACTORS, LLC 37000 980-B DEHART PLACE ELIZABETH NJ 07202 3-2-1 QUALITY PRINTING 21779 100 JERSEY AVENUE NEW BRUNSWICK NJ 08901 3-D MFG.-DBA- AMERICAN LA-FRANCE 2831 500 S. AIRPORT ROAD SHAWANO WI 54166 4 FRONT VIDEO DESIGN INC. 22299 1500 BROADWAY #509 NEW YORK NY 10036 55 WASHINGTON STREET LLC 28132 P.O. BOX 66 CLOSTER NJ 07624 9-15 SOUTH MAIN STREET CORP. 20587 1125 ATLANTIC AVE., SUITE 617 ATLANTIC CITY NJ 08401 A & A ENGINEERING 9780 300 CORPORATE CENTER DRIVE MANALAPAN NJ 07726 A & B WIPER SUPPLY, INC. 6848 116 FOUNTAIN ST. PHILADELPHIA PA 19127 A & E CARPENTRY, INC. 8048 584 STUDIO RD. RIDGEFIELD NJ 07657 A & L UNIFORMS, L L C 37818 2605 SOUTH BROAD STREET TRENTON NJ 08610 A & P TUTORING, LLC 34701 4201 CHURCH ROAD #242 MT. LAUREL NJ 08054 A & R AUTO SUPPLY, INC. 7169 300 ATLANTIC CITY BLVD. TOMS RIVER NJ 08757 A & S FUEL OIL CO. INC. 25667 95 CALAIS ROAD PO BOX 22 IRONIA NJ 07845 A & W TECHNICAL SALES, INC. 33404 420 COMMERCE LANE, SUITE 3 WEST BERLIN NJ 08091 A AND C LABORATORIES, INC 17387 168 W. -

Niels Ivar Bech
Niels Ivar Bech Born 1920 Lemvig, Denmark; died 1975; originator of Danish computer development. Niels Ivar Bech was one of Europe's most creative leaders in the field of electronic digital computers.1 He originated Danish computer development under the auspices of the Danish Academy of Technical Sciences and was first managing director of its subsidiary, Regnecentralen, which was Denmark's (and one of Europe's) first independent designer and builder of electronic computers. Bech was born in 1920 in Lemvig, a small town in the northwestern corner of Jutland, Denmark; his schooling ended with his graduation from Gentofte High School (Statsskole) in 1940. Because he had no further formal education, he was not held in as high esteem as he deserved by some less gifted people who had degrees or were university professors. During the war years, Bech was a teacher. When Denmark was occupied by the Nazis, he became a runner for the distribution of illegal underground newspapers, and on occasion served on the crews of the small boats that perilously smuggled Danish Jews across the Kattegat to Sweden. After the war, from 1949 to 1957, he worked as a calculator in the Actuarial Department of the Copenhagen Telephone Company (Kobenhavns Telefon Aktieselskab, KTA). The Danish Academy of Technical Sciences established a committee on electronic computing in 1947, and in 1952 the academy obtained free access to the complete design of the computer BESK (Binar Electronisk Sekevens Kalkylator) being built in Stockholm by the Swedish Mathematical Center (Matematikmaskinnamndens Arbetsgrupp). In 1953 the Danish academy founded a nonprofit computer subsidiary, Regnecentralen. -

The Role of Institutions and Policy in Knowledge Sector Development: an Assessment of the Danish and Norwegian Information Communication Technology Sectors
University of Denver Digital Commons @ DU Electronic Theses and Dissertations Graduate Studies 1-1-2015 The Role of Institutions and Policy in Knowledge Sector Development: An Assessment of the Danish and Norwegian Information Communication Technology Sectors Keith M. Gehring University of Denver Follow this and additional works at: https://digitalcommons.du.edu/etd Part of the International Relations Commons Recommended Citation Gehring, Keith M., "The Role of Institutions and Policy in Knowledge Sector Development: An Assessment of the Danish and Norwegian Information Communication Technology Sectors" (2015). Electronic Theses and Dissertations. 1086. https://digitalcommons.du.edu/etd/1086 This Dissertation is brought to you for free and open access by the Graduate Studies at Digital Commons @ DU. It has been accepted for inclusion in Electronic Theses and Dissertations by an authorized administrator of Digital Commons @ DU. For more information, please contact [email protected],[email protected]. THE ROLE OF INSTITUTIONS AND POLICY IN KNOWLEDGE SECTOR DEVELOPMENT: AN ASSESSMENT OF THE DANISH AND NORWEGIAN INFORMATION COMMUNICATION TECHNOLOGY SECTORS __________ A Dissertation Presented to the Faculty of the Josef Korbel School of International Studies University of Denver __________ In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy __________ by Keith M. Gehring November 2015 Advisor: Professor Martin Rhodes Author: Keith M. Gehring Title: THE ROLE OF INSTITUTIONS AND POLICY IN KNOWLEDGE SECTOR DEVELOPMENT: AN ASSESSMENT OF THE DANISH AND NORWEGIAN INFORMATION COMMUNICATION TECHNOLOGY SECTORS Advisor: Professor Martin Rhodes Degree Date: November 2015 ABSTRACT The Nordic economies of Denmark, Finland, Norway, and Sweden outperform on average nearly ever OECD country in the share of value added stemming from the information and communication technology (ICT) sector. -

AN INTERVIEW with BORJE LANGEFORS from SARA to TAIS
AN INTERVIEW WITH BORJE LANGEFORS From SARA to TAIS Janis Bubenko and Ingemar Dahlstrand This interview with professor emeritus Borje Langefors {BL) was carried out by his two former co-workers Ingemar Dahlstrand^ {ID) and Janis Bubenko^ {JB), JB\ Here we are, the three of us: Borje Langefors, Ingemar Dahlstrand and me, Janis Bubenko, and we are going to talk about Borje's historical times and memories. Let us start out with the question: How did you actually get into computing? BL\ I was working at the NAF^ industries where my boss and I developed a machine for dynamic balancing of cardan-shafts. We integrated an analog device into the machine, which gave the necessary correction indications. JB\ When was that? BL\ That was in 1944, because that cardan-shaft was going into the Volvo PV 444 car. After that, I was transferred to NAF-Linkoping. In Linkoping, I became acquainted with Torkel Rand, who recruited me for the SAAB aircraft company (in 1949). There I was to work with analog devices for stress calculations for wings. Rand had done one-dimensional analyses, which worked reasonably well for straight wings at right angles to the plane's body. However, when we got into arrow wings and delta wings, we had to analyze in three dimensions, and that was Formerly manager of the Lund University computing centre. Developed Sweden's first Algol compiler in 1961. Professor em. at the Department of Computer and Systems Science at the Royal Institute of Technology (KTH) and Stockholm University. NAF - Nordiska Armaturfabrikema (Nordic Armature Factories) 8 Janis Bubenko and Ingemar Dahlstrand difficult with analog technique. -

A Programmer's Story. the Life of a Computer Pioneer
A PROGRAMMER’S STORY The Life of a Computer Pioneer PER BRINCH HANSEN FOR CHARLES HAYDEN Copyright c 2004 by Per Brinch Hansen. All rights reserved. Per Brinch Hansen 5070 Pine Valley Drive, Fayetteville, NY 13066, USA CONTENTS Acknowledgments v 1 Learning to Read and Write 1938–57 1 Nobody ever writes two books – My parents – Hitler occupies Denmark – Talking in kindergarten – A visionary teacher – The class newspaper – “The topic” – An elite high school – Variety of teachers – Chemical experiments – Playing tennis with a champion – Listening to jazz – “Ulysses” and other novels. 2 Choosing a Career 1957–63 17 Advice from a professor – Technical University of Denmark – rsted’s inuence – Distant professors – Easter brew – Fired for being late – International exchange student – Masers and lasers – Radio talk — Graduation trip to Yugoslavia – An attractive tourist guide – Master of Science – Professional goals. 3 Learning from the Masters 1963–66 35 Regnecentralen – Algol 60 – Peter Naur and Jrn Jensen – Dask and Gier Algol – The mysterious Cobol 61 report – I join the compiler group – Playing roulette at Marienlyst resort – Jump- starting Siemens Cobol at Mogenstrup Inn – Negotiating salary – Compiler testing in Munich – Naur and Dijkstra smile in Stock- holm – The Cobol compiler is nished – Milena and I are married in Slovenia. 4 Young Man in a Hurr 1966–70 59 Naur’s vision of datalogy – Architect of the RC 4000 computer – Programming a real-time system – Working with Henning Isaks- son, Peter Kraft, and Charles Simonyi – Edsger Dijkstra’s inu- ence – Head of software development – Risking my future at Hotel Marina – The RC 4000 multiprogramming system – I meet Edsger Dijkstra, Niklaus Wirth, and Tony Hoare – The genius of Niels Ivar Bech. -

Risø National Laboratory in the Series Risø-R Reports, Risø-M Reports, 1957 - May 1982
View metadata,Downloaded citation and from similar orbit.dtu.dk papers on:at core.ac.uk Dec 20, 2017 brought to you by CORE provided by Online Research Database In Technology Reports Issued by the Risø National Laboratory in the Series Risø-R Reports, Risø-M Reports, 1957 - May 1982 Forskningscenter Risø, Roskilde Publication date: 1982 Document Version Publisher's PDF, also known as Version of record Link back to DTU Orbit Citation (APA): Risø National Laboratory, R. (1982). Reports Issued by the Risø National Laboratory in the Series Risø-R Reports, Risø-M Reports, 1957 - May 1982. Danmarks Tekniske Universitet, Risø Nationallaboratoriet for Bæredygtig Energi. (Risø-M; No. 2377). General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. RISØ-M-2377 REPORTS ISSUED BY THE RISØ NATIONAL LABORATORY IN THE SERIES: RISØ-R REPORTS RISØ-M REPORTS 1957 - May 1982 Abstract. This list includes all scientific and technical reports issued from 1957 - May 198 2 by Risø National Laboratory, former Research Establishment Risø. -
Ray: a Distributed Framework for Emerging AI Applications
Ray: A Distributed Framework for Emerging AI Applications Philipp Moritz, Robert Nishihara, Stephanie Wang, Alexey Tumanov, Richard Liaw, Eric Liang, Melih Elibol, Zongheng Yang, William Paul, Michael I. Jordan, and Ion Stoica, UC Berkeley https://www.usenix.org/conference/osdi18/presentation/nishihara This paper is included in the Proceedings of the 13th USENIX Symposium on Operating Systems Design and Implementation (OSDI ’18). October 8–10, 2018 • Carlsbad, CA, USA ISBN 978-1-931971-47-8 Open access to the Proceedings of the 13th USENIX Symposium on Operating Systems Design and Implementation is sponsored by USENIX. Ray: A Distributed Framework for Emerging AI Applications Philipp Moritz,∗ Robert Nishihara,∗ Stephanie Wang, Alexey Tumanov, Richard Liaw, Eric Liang, Melih Elibol, Zongheng Yang, William Paul, Michael I. Jordan, Ion Stoica University of California, Berkeley Abstract and their use in prediction. These frameworks often lever- age specialized hardware (e.g., GPUs and TPUs), with the The next generation of AI applications will continuously goal of reducing training time in a batch setting. Examples interact with the environment and learn from these inter- include TensorFlow [7], MXNet [18], and PyTorch [46]. actions. These applications impose new and demanding The promise of AI is, however, far broader than classi- systems requirements, both in terms of performance and cal supervised learning. Emerging AI applications must flexibility. In this paper, we consider these requirements increasingly operate in dynamic environments, react to and present Ray—a distributed system to address them. changes in the environment, and take sequences of ac- Ray implements a unified interface that can express both tions to accomplish long-term goals [8, 43]. -

Downloading from Naur's Website: 19
1 2017.04.16 Accepted for publication in Nuncius Hamburgensis, Band 20. Preprint of invited paper for Gudrun Wolfschmidt's book: Vom Abakus zum Computer - Begleitbuch zur Ausstellung "Geschichte der Rechentechnik", 2015-2019 GIER: A Danish computer from 1961 with a role in the modern revolution of astronomy By Erik Høg, lektor emeritus, Niels Bohr Institute, Copenhagen Abstract: A Danish computer, GIER, from 1961 played a vital role in the development of a new method for astrometric measurement. This method, photon counting astrometry, ultimately led to two satellites with a significant role in the modern revolution of astronomy. A GIER was installed at the Hamburg Observatory in 1964 where it was used to implement the entirely new method for the meas- urement of stellar positions by means of a meridian circle, then the fundamental instrument of as- trometry. An expedition to Perth in Western Australia with the instrument and the computer was a suc- cess. This method was also implemented in space in the first ever astrometric satellite Hipparcos launched by ESA in 1989. The Hipparcos results published in 1997 revolutionized astrometry with an impact in all branches of astronomy from the solar system and stellar structure to cosmic distances and the dynamics of the Milky Way. In turn, the results paved the way for a successor, the one million times more powerful Gaia astrometry satellite launched by ESA in 2013. Preparations for a Gaia suc- cessor in twenty years are making progress. Zusammenfassung: Eine elektronische Rechenmaschine, GIER, von 1961 aus Dänischer Herkunft spielte eine vitale Rolle bei der Entwiklung einer neuen astrometrischen Messmethode. -

Early Nordic Compilers and Autocodes Peter Sestoft
Early Nordic Compilers and Autocodes Peter Sestoft To cite this version: Peter Sestoft. Early Nordic Compilers and Autocodes. 4th History of Nordic Computing (HiNC4), Aug 2014, Copenhagen, Denmark. pp.350-366, 10.1007/978-3-319-17145-6_36. hal-01301428 HAL Id: hal-01301428 https://hal.inria.fr/hal-01301428 Submitted on 12 Apr 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution| 4.0 International License Early Nordic Compilers and Autocodes Version 2.1.0 of 2014-11-17 Peter Sestoft IT University of Copenhagen Rued Langgaards Vej 7, DK-2300 Copenhagen S, Denmark [email protected] Abstract. The early development of compilers for high-level program- ming languages, and of so-called autocoding systems, is well documented at the international level but not as regards the Nordic countries. The goal of this paper is to provide a survey of compiler and autocode development in the Nordic countries in the early years, roughly 1953 to 1965, and to relate it to international developments. We also touch on some of the historical societal context. 1 Introduction A compiler translates a high-level, programmer-friendly programming language into the machine code that computer hardware can execute.