Program Analysis As Machine Learning
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Executable Code Is Not the Proper Subject of Copyright Law a Retrospective Criticism of Technical and Legal Naivete in the Apple V
Executable Code is Not the Proper Subject of Copyright Law A retrospective criticism of technical and legal naivete in the Apple V. Franklin case Matthew M. Swann, Clark S. Turner, Ph.D., Department of Computer Science Cal Poly State University November 18, 2004 Abstract: Copyright was created by government for a purpose. Its purpose was to be an incentive to produce and disseminate new and useful knowledge to society. Source code is written to express its underlying ideas and is clearly included as a copyrightable artifact. However, since Apple v. Franklin, copyright has been extended to protect an opaque software executable that does not express its underlying ideas. Common commercial practice involves keeping the source code secret, hiding any innovative ideas expressed there, while copyrighting the executable, where the underlying ideas are not exposed. By examining copyright’s historical heritage we can determine whether software copyright for an opaque artifact upholds the bargain between authors and society as intended by our Founding Fathers. This paper first describes the origins of copyright, the nature of software, and the unique problems involved. It then determines whether current copyright protection for the opaque executable realizes the economic model underpinning copyright law. Having found the current legal interpretation insufficient to protect software without compromising its principles, we suggest new legislation which would respect the philosophy on which copyright in this nation was founded. Table of Contents INTRODUCTION................................................................................................. 1 THE ORIGIN OF COPYRIGHT ........................................................................... 1 The Idea is Born 1 A New Beginning 2 The Social Bargain 3 Copyright and the Constitution 4 THE BASICS OF SOFTWARE .......................................................................... -

IBM Developer for Z/OS Enterprise Edition
Solution Brief IBM Developer for z/OS Enterprise Edition A comprehensive, robust toolset for developing z/OS applications using DevOps software delivery practices Companies must be agile to respond to market demands. The digital transformation is a continuous process, embracing hybrid cloud and the Application Program Interface (API) economy. To capitalize on opportunities, businesses must modernize existing applications and build new cloud native applications without disrupting services. This transformation is led by software delivery teams employing DevOps practices that include continuous integration and continuous delivery to a shared pipeline. For z/OS Developers, this transformation starts with modern tools that empower them to deliver more, faster, with better quality and agility. IBM Developer for z/OS Enterprise Edition is a modern, robust solution that offers the program analysis, edit, user build, debug, and test capabilities z/OS developers need, plus easy integration with the shared pipeline. The challenge IBM z/OS application development and software delivery teams have unique challenges with applications, tools, and skills. Adoption of agile practices Application modernization “DevOps and agile • Mainframe applications • Applications require development on the platform require frequent updates access to digital services have jumped from the early adopter stage in 2016 to • Development teams must with controlled APIs becoming common among adopt DevOps practices to • The journey to cloud mainframe businesses”1 improve their -

Static Analysis the Workhorse of a End-To-End Securitye Testing Strategy
Static Analysis The Workhorse of a End-to-End Securitye Testing Strategy Achim D. Brucker [email protected] http://www.brucker.uk/ Department of Computer Science, The University of Sheffield, Sheffield, UK Winter School SECENTIS 2016 Security and Trust of Next Generation Enterprise Information Systems February 8–12, 2016, Trento, Italy Static Analysis: The Workhorse of a End-to-End Securitye Testing Strategy Abstract Security testing is an important part of any security development lifecycle (SDL) and, thus, should be a part of any software (development) lifecycle. Still, security testing is often understood as an activity done by security testers in the time between “end of development” and “offering the product to customers.” Learning from traditional testing that the fixing of bugs is the more costly the later it is done in development, security testing should be integrated, as early as possible, into the daily development activities. The fact that static analysis can be deployed as soon as the first line of code is written, makes static analysis the right workhorse to start security testing activities. In this lecture, I will present a risk-based security testing strategy that is used at a large European software vendor. While this security testing strategy combines static and dynamic security testing techniques, I will focus on static analysis. This lecture provides a introduction to the foundations of static analysis as well as insights into the challenges and solutions of rolling out static analysis to more than 20000 developers, distributed across the whole world. A.D. Brucker The University of Sheffield Static Analysis February 8–12., 2016 2 Today: Background and how it works ideally Tomorrow: (Ugly) real world problems and challenges (or why static analysis is “undecideable” in practice) Our Plan A.D. -
Studying the Real World Today's Topics
Studying the real world Today's topics Free and open source software (FOSS) What is it, who uses it, history Making the most of other people's software Learning from, using, and contributing Learning about your own system Using tools to understand software without source Free and open source software Access to source code Free = freedom to use, modify, copy Some potential benefits Can build for different platforms and needs Development driven by community Different perspectives and ideas More people looking at the code for bugs/security issues Structure Volunteers, sponsored by companies Generally anyone can propose ideas and submit code Different structures in charge of what features/code gets in Free and open source software Tons of FOSS out there Nearly everything on myth Desktop applications (Firefox, Chromium, LibreOffice) Programming tools (compilers, libraries, IDEs) Servers (Apache web server, MySQL) Many companies contribute to FOSS Android core Apple Darwin Microsoft .NET A brief history of FOSS 1960s: Software distributed with hardware Source included, users could fix bugs 1970s: Start of software licensing 1974: Software is copyrightable 1975: First license for UNIX sold 1980s: Popularity of closed-source software Software valued independent of hardware Richard Stallman Started the free software movement (1983) The GNU project GNU = GNU's Not Unix An operating system with unix-like interface GNU General Public License Free software: users have access to source, can modify and redistribute Must share modifications under same -
Chapter 1 Introduction to Computers, Programs, and Java
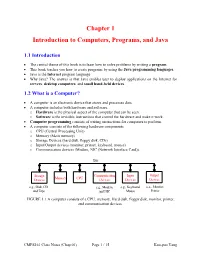
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • The central theme of this book is to learn how to solve problems by writing a program . • This book teaches you how to create programs by using the Java programming languages . • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers , desktop computers , and small hand-held devices . 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Computer programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Bus Storage Communication Input Output Memory CPU Devices Devices Devices Devices e.g., Disk, CD, e.g., Modem, e.g., Keyboard, e.g., Monitor, and Tape and NIC Mouse Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. CMPS161 Class Notes (Chap 01) Page 1 / 15 Kuo-pao Yang 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. -
Some Preliminary Implications of WTO Source Code Proposala INTRODUCTION
Some preliminary implications of WTO source code proposala INTRODUCTION ............................................................................................................................................... 1 HOW THIS IS TRIMS+ ....................................................................................................................................... 3 HOW THIS IS TRIPS+ ......................................................................................................................................... 3 WHY GOVERNMENTS MAY REQUIRE TRANSFER OF SOURCE CODE .................................................................. 4 TECHNOLOGY TRANSFER ........................................................................................................................................... 4 AS A REMEDY FOR ANTICOMPETITIVE CONDUCT ............................................................................................................. 4 TAX LAW ............................................................................................................................................................... 5 IN GOVERNMENT PROCUREMENT ................................................................................................................................ 5 WHY GOVERNMENTS MAY REQUIRE ACCESS TO SOURCE CODE ...................................................................... 5 COMPETITION LAW ................................................................................................................................................. -

Precise and Scalable Static Program Analysis of NASA Flight Software
Precise and Scalable Static Program Analysis of NASA Flight Software G. Brat and A. Venet Kestrel Technology NASA Ames Research Center, MS 26912 Moffett Field, CA 94035-1000 650-604-1 105 650-604-0775 brat @email.arc.nasa.gov [email protected] Abstract-Recent NASA mission failures (e.g., Mars Polar Unfortunately, traditional verification methods (such as Lander and Mars Orbiter) illustrate the importance of having testing) cannot guarantee the absence of errors in software an efficient verification and validation process for such systems. Therefore, it is important to build verification tools systems. One software error, as simple as it may be, can that exhaustively check for as many classes of errors as cause the loss of an expensive mission, or lead to budget possible. Static program analysis is a verification technique overruns and crunched schedules. Unfortunately, traditional that identifies faults, or certifies the absence of faults, in verification methods cannot guarantee the absence of errors software without having to execute the program. Using the in software systems. Therefore, we have developed the CGS formal semantic of the programming language (C in our static program analysis tool, which can exhaustively analyze case), this technique analyses the source code of a program large C programs. CGS analyzes the source code and looking for faults of a certain type. We have developed a identifies statements in which arrays are accessed out Of static program analysis tool, called C Global Surveyor bounds, or, pointers are used outside the memory region (CGS), which can analyze large C programs for embedded they should address. -
Three Architectural Models for Compiler-Controlled Speculative
Three Architectural Mo dels for Compiler-Controlled Sp eculative Execution Pohua P. Chang Nancy J. Warter Scott A. Mahlke Wil liam Y. Chen Wen-mei W. Hwu Abstract To e ectively exploit instruction level parallelism, the compiler must move instructions across branches. When an instruction is moved ab ove a branch that it is control dep endent on, it is considered to b e sp eculatively executed since it is executed b efore it is known whether or not its result is needed. There are p otential hazards when sp eculatively executing instructions. If these hazards can b e eliminated, the compiler can more aggressively schedule the co de. The hazards of sp eculative execution are outlined in this pap er. Three architectural mo dels: re- stricted, general and b o osting, whichhave increasing amounts of supp ort for removing these hazards are discussed. The p erformance gained by each level of additional hardware supp ort is analyzed using the IMPACT C compiler which p erforms sup erblo ckscheduling for sup erscalar and sup erpip elined pro cessors. Index terms - Conditional branches, exception handling, sp eculative execution, static co de scheduling, sup erblo ck, sup erpip elining, sup erscalar. The authors are with the Center for Reliable and High-Performance Computing, University of Illinois, Urbana- Champaign, Illinoi s, 61801. 1 1 Intro duction For non-numeric programs, there is insucient instruction level parallelism available within a basic blo ck to exploit sup erscalar and sup erpip eli ned pro cessors [1][2][3]. Toschedule instructions b eyond the basic blo ck b oundary, instructions havetobemoved across conditional branches. -
Advanced Systems Security: Symbolic Execution
Systems and Internet Infrastructure Security Network and Security Research Center Department of Computer Science and Engineering Pennsylvania State University, University Park PA Advanced Systems Security:! Symbolic Execution Trent Jaeger Systems and Internet Infrastructure Security (SIIS) Lab Computer Science and Engineering Department Pennsylvania State University Systems and Internet Infrastructure Security (SIIS) Laboratory Page 1 Problem • Programs have flaws ‣ Can we find (and fix) them before adversaries can reach and exploit them? • Then, they become “vulnerabilities” Systems and Internet Infrastructure Security (SIIS) Laboratory Page 2 Vulnerabilities • A program vulnerability consists of three elements: ‣ A flaw ‣ Accessible to an adversary ‣ Adversary has the capability to exploit the flaw • Which one should we focus on to find and fix vulnerabilities? ‣ Different methods are used for each Systems and Internet Infrastructure Security (SIIS) Laboratory Page 3 Is It a Flaw? • Problem: Are these flaws? ‣ Failing to check the bounds on a buffer write? ‣ printf(char *n); ‣ strcpy(char *ptr, char *user_data); ‣ gets(char *ptr) • From man page: “Never use gets().” ‣ sprintf(char *s, const char *template, ...) • From gnu.org: “Warning: The sprintf function can be dangerous because it can potentially output more characters than can fit in the allocation size of the string s.” • Should you fix all of these? Systems and Internet Infrastructure Security (SIIS) Laboratory Page 4 Is It a Flaw? • Problem: Are these flaws? ‣ open( filename, O_CREAT ); -

Static Program Analysis Via 3-Valued Logic
Static Program Analysis via 3-Valued Logic ¡ ¢ £ Thomas Reps , Mooly Sagiv , and Reinhard Wilhelm ¤ Comp. Sci. Dept., University of Wisconsin; [email protected] ¥ School of Comp. Sci., Tel Aviv University; [email protected] ¦ Informatik, Univ. des Saarlandes;[email protected] Abstract. This paper reviews the principles behind the paradigm of “abstract interpretation via § -valued logic,” discusses recent work to extend the approach, and summarizes on- going research aimed at overcoming remaining limitations on the ability to create program- analysis algorithms fully automatically. 1 Introduction Static analysis concerns techniques for obtaining information about the possible states that a program passes through during execution, without actually running the program on specific inputs. Instead, static-analysis techniques explore a program’s behavior for all possible inputs and all possible states that the program can reach. To make this feasible, the program is “run in the aggregate”—i.e., on abstract descriptors that repre- sent collections of many states. In the last few years, researchers have made important advances in applying static analysis in new kinds of program-analysis tools for identi- fying bugs and security vulnerabilities [1–7]. In these tools, static analysis provides a way in which properties of a program’s behavior can be verified (or, alternatively, ways in which bugs and security vulnerabilities can be detected). Static analysis is used to provide a safe answer to the question “Can the program reach a bad state?” Despite these successes, substantial challenges still remain. In particular, pointers and dynamically-allocated storage are features of all modern imperative programming languages, but their use is error-prone: ¨ Dereferencing NULL-valued pointers and accessing previously deallocated stor- age are two common programming mistakes. -

Opportunities and Open Problems for Static and Dynamic Program Analysis Mark Harman∗, Peter O’Hearn∗ ∗Facebook London and University College London, UK
1 From Start-ups to Scale-ups: Opportunities and Open Problems for Static and Dynamic Program Analysis Mark Harman∗, Peter O’Hearn∗ ∗Facebook London and University College London, UK Abstract—This paper1 describes some of the challenges and research questions that target the most productive intersection opportunities when deploying static and dynamic analysis at we have yet witnessed: that between exciting, intellectually scale, drawing on the authors’ experience with the Infer and challenging science, and real-world deployment impact. Sapienz Technologies at Facebook, each of which started life as a research-led start-up that was subsequently deployed at scale, Many industrialists have perhaps tended to regard it unlikely impacting billions of people worldwide. that much academic work will prove relevant to their most The paper identifies open problems that have yet to receive pressing industrial concerns. On the other hand, it is not significant attention from the scientific community, yet which uncommon for academic and scientific researchers to believe have potential for profound real world impact, formulating these that most of the problems faced by industrialists are either as research questions that, we believe, are ripe for exploration and that would make excellent topics for research projects. boring, tedious or scientifically uninteresting. This sociological phenomenon has led to a great deal of miscommunication between the academic and industrial sectors. I. INTRODUCTION We hope that we can make a small contribution by focusing on the intersection of challenging and interesting scientific How do we transition research on static and dynamic problems with pressing industrial deployment needs. Our aim analysis techniques from the testing and verification research is to move the debate beyond relatively unhelpful observations communities to industrial practice? Many have asked this we have typically encountered in, for example, conference question, and others related to it. -

Building Useful Program Analysis Tools Using an Extensible Java Compiler
Building Useful Program Analysis Tools Using an Extensible Java Compiler Edward Aftandilian, Raluca Sauciuc Siddharth Priya, Sundaresan Krishnan Google, Inc. Google, Inc. Mountain View, CA, USA Hyderabad, India feaftan, [email protected] fsiddharth, [email protected] Abstract—Large software companies need customized tools a specific task, but they fail for several reasons. First, ad- to manage their source code. These tools are often built in hoc program analysis tools are often brittle and break on an ad-hoc fashion, using brittle technologies such as regular uncommon-but-valid code patterns. Second, simple ad-hoc expressions and home-grown parsers. Changes in the language cause the tools to break. More importantly, these ad-hoc tools tools don’t provide sufficient information to perform many often do not support uncommon-but-valid code code patterns. non-trivial analyses, including refactorings. Type and symbol We report our experiences building source-code analysis information is especially useful, but amounts to writing a tools at Google on top of a third-party, open-source, extensible type-checker. Finally, more sophisticated program analysis compiler. We describe three tools in use on our Java codebase. tools are expensive to create and maintain, especially as the The first, Strict Java Dependencies, enforces our dependency target language evolves. policy in order to reduce JAR file sizes and testing load. The second, error-prone, adds new error checks to the compilation In this paper, we present our experience building special- process and automates repair of those errors at a whole- purpose tools on top of the the piece of software in our codebase scale.