Visualising Data from Cloudsat and CALIPSO Satellites
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Remote Sensing (Test)
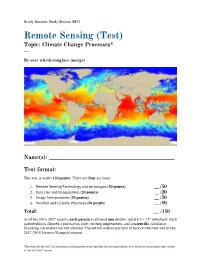
Scioly Summer Study Session 2017 Remote Sensing (Test) Topic: Climate Change Pro c esses* ___ By user whythelongface (merge) Name(s): _________________________________________ Test format: This test is worth 150 points. There are four sections: 1. Remote Sensing Technology and techniques (50 points) ___ /50 2. Data Use and Manipulation (20 points) ___ /20 3. Image Interpretation (30 points) ___ /30 4. Weather and Climate Processes (50 points) ___ /50 Total: ___ /150 As of the 2016-2017 season, each person is allowed one double-sided 8.5 × 11” notesheet. Each partnership is allowed a protractor, ruler, writing implements, and a scientific calculator. Graphing calculators are not allowed. The author wishes you best of luck on this test and in the 2017-2018 Science Olympiad season. *The topic for the 2017-2018 season is still unknown at the time this test is being written, so it will focus on the same topic as that of the 2016-2017 season. Part 1: Remote Sensing Technology Multiple Choice (1 point each) -

Digital Skills in Sub-Saharan Africa Spotlight on Ghana
Digital Skills in Sub-Saharan Africa Spotlight on Ghana IN COOPERATION WITH: ABOUT IFC Research and writing underpinning the report was conducted by the L.E.K. Global Education practice. The L.E.K. IFC—a sister organization of the World Bank and member of team was led by Ashwin Assomull, Maryanna Abdo, and the World Bank Group—is the largest global development Ridhi Gupta, including writing by Maryanna Abdo, Priyanka institution focused on the private sector in emerging Thapar, and Jaisal Kapoor and research contributions by Neil markets. We work with more than 2,000 businesses Aneja, Shrrinesh Balasubramanian, Patrick Desmond, Ridhi worldwide, using our capital, expertise, and influence to Gupta, Jaisal Kapoor, Rohan Sur, and Priyanka Thapar. create markets and opportunities in the toughest areas of Sudeep Laad provided valuable insights on the Ghana the world. For more information, visit www.ifc.org. market landscape and opportunity sizing. ABOUT REPORT L.E.K. is a global management consulting firm that uses deep industry expertise and rigorous analysis to help business This publication, Digital Skills in Sub-Saharan Africa: Spotlight leaders achieve practical results with real impact. The Global on Ghana, was produced by the Manufacturing Agribusiness Education practice is a specialist international team based in and Services department of the International Finance Singapore serving a global client base from China to Chile. Corporation, in cooperation with the Global Education practice at L.E.K. Consulting. It was developed under the ACKNOWLEDGMENTS overall guidance of Tomasz Telma (Senior Director, MAS), The report would not have been possible without the Mary-Jean Moyo (Director, MAS, Middle-East and Africa), participation of leadership and alumni from eight case study Elena Sterlin (Senior Manager, Global Health and Education, organizations, including: MAS) and Olaf Schmidt (Manager, Services, MAS, Sub- Andela: Lara Kok, Executive Coordinator; Anudip: Dipak Saharan Africa). -

Highlights in Space 2010
International Astronautical Federation Committee on Space Research International Institute of Space Law 94 bis, Avenue de Suffren c/o CNES 94 bis, Avenue de Suffren UNITED NATIONS 75015 Paris, France 2 place Maurice Quentin 75015 Paris, France Tel: +33 1 45 67 42 60 Fax: +33 1 42 73 21 20 Tel. + 33 1 44 76 75 10 E-mail: : [email protected] E-mail: [email protected] Fax. + 33 1 44 76 74 37 URL: www.iislweb.com OFFICE FOR OUTER SPACE AFFAIRS URL: www.iafastro.com E-mail: [email protected] URL : http://cosparhq.cnes.fr Highlights in Space 2010 Prepared in cooperation with the International Astronautical Federation, the Committee on Space Research and the International Institute of Space Law The United Nations Office for Outer Space Affairs is responsible for promoting international cooperation in the peaceful uses of outer space and assisting developing countries in using space science and technology. United Nations Office for Outer Space Affairs P. O. Box 500, 1400 Vienna, Austria Tel: (+43-1) 26060-4950 Fax: (+43-1) 26060-5830 E-mail: [email protected] URL: www.unoosa.org United Nations publication Printed in Austria USD 15 Sales No. E.11.I.3 ISBN 978-92-1-101236-1 ST/SPACE/57 *1180239* V.11-80239—January 2011—775 UNITED NATIONS OFFICE FOR OUTER SPACE AFFAIRS UNITED NATIONS OFFICE AT VIENNA Highlights in Space 2010 Prepared in cooperation with the International Astronautical Federation, the Committee on Space Research and the International Institute of Space Law Progress in space science, technology and applications, international cooperation and space law UNITED NATIONS New York, 2011 UniTEd NationS PUblication Sales no. -

Cloudsat CALIPSO
www.nasa.gov andSpaceAdministration National Aeronautics & CloudSat CALIPSO Clean air is important to everyone’s health and well-being. Clean air is vital to life on Earth. An average adult breathes more than 3000 gallons of air every day. In some places, the air we breathe is polluted. Human activities such as driving cars and trucks, burning coal and oil, and manufacturing chemicals release gases and small particles known as aerosols into the atmosphere. Natural processes such as for- est fires and wind-blown desert dust also produce large amounts of aerosols, but roughly half of the to- tal aerosols worldwide results from human activities. Aerosol particles are so small they can remain sus- pended in the air for days or weeks. Smaller aerosols can be breathed into the lungs. In high enough con- centrations, pollution aerosols can threaten human health. Aerosols can also impact our environment. Aerosols reflect sunlight back to space, cooling the Earth’s surface and some types of aerosols also absorb sunlight—heating the atmosphere. Because clouds form on aerosol particles, changes in aerosols can change clouds and even precipitation. These effects can change atmospheric circulation patterns, and, over time, even the Earth’s climate. The Air We Breathe The Air We We need better information, on a global scale from satellites, on where aerosols are produced and where they go. Aerosols can be carried through the atmosphere-traveling hundreds or thousands of miles from their sources. We need this satellite infor- mation to improve daily forecasts of air quality and long-term forecasts of climate change. -

Redundancy-Free Analysis of Multi-Revision Software Artifacts
Empirical Software Engineering (preprint) Redundancy-free Analysis of Multi-revision Software Artifacts Carol V. Alexandru · Sebastiano Panichella · Sebastian Proksch · Harald C. Gall 30. April 2018 Abstract Researchers often analyze several revisions of a software project to obtain historical data about its evolution. For example, they statically ana- lyze the source code and monitor the evolution of certain metrics over multi- ple revisions. The time and resource requirements for running these analyses often make it necessary to limit the number of analyzed revisions, e.g., by only selecting major revisions or by using a coarse-grained sampling strategy, which could remove significant details of the evolution. Most existing analy- sis techniques are not designed for the analysis of multi-revision artifacts and they treat each revision individually. However, the actual difference between two subsequent revisions is typically very small. Thus, tools tailored for the analysis of multiple revisions should only analyze these differences, thereby preventing re-computation and storage of redundant data, improving scalabil- ity and enabling the study of a larger number of revisions. In this work, we propose the Lean Language-Independent Software Analyzer (LISA), a generic framework for representing and analyzing multi-revisioned software artifacts. It employs a redundancy-free, multi-revision representation for artifacts and avoids re-computation by only analyzing changed artifact fragments across thousands of revisions. The evaluation of our approach consists of measur- ing the effect of each individual technique incorporated, an in-depth study of LISA's resource requirements and a large-scale analysis over 7 million program revisions of 4,000 software projects written in four languages. -

Summary of the Key Issues in Space-Based Measurements
Summary of the Key Issues in Space-based Measurements: Identification of Future Needs and Opportunities Jean-Christopher LAMBERT Belgian Institute for Space Aeronomy (IASB-BIRA) Brussels, Belgium with contributions by 8ORM Participants, CEOS, and NDACC Satellite WG 8th ORM, WMO/UNEP, Geneva, CH, May 2-4, 2011 Summary of the Key Issues in Space-based Measurements: Identification of Future Needs and Opportunities 1. Satellite missions 2. Follow-up of 7ORM issues 3. Data quality strategy 4. Suggestions and recommendations 8th ORM, WMO/UNEP, Geneva, CH, May 2-4, 2011 Catalogues and details on satellite missions NDACC Satellite WG Web Site http://www.oma.be/NDSC_SatWG/Home.html Committee on Earth Observation Satellites http://ceos.org WMO Satellite & Requirements Database http://192.91.247.60/sat/index.htm 8th ORM, WMO/UNEP, Geneva, CH, May 2-4, 2011 2020 2019 2018 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2004 2003 2002 2001 2000 I 1999 UV/VIS/NIR 8-2020) VIS/IR 1998 multi-sensor 1997 1996 1995 UV IR MW 1994 I 1993 I 1992 1991 I I 1990 I 1989 Spectral range: I I 1988 I I 1987 I I 1986 I I 1985 I I 1984 I I 1983 1982 Sun/Moon occultation stellar occultation 1981 multi-target I 1980 1979 1978 I nadir limb nadir/limb I Nimbus 7 METEOR 3 ADEOS 1 Earth Probe Nimbus 7 NOAA-9 NOAA-11 NOAA-14 NOAA-16 NOAA-17 NOAA-N/18 NOAA-N1/19 STS STS 87 & 107 NPP Sounding strategy: NPOESS SATELLITE MISSIONS FOR ATMOSPHERIC COMPOSITIONFeng-Yun-3A (197 Feng-Yun-3B Feng-Yun-3x SOUNDER MISSION Nimbus 7 AEM-B TOMS ERBS METOR 3M STS-64 CALIPSO -

Master's Thesis
2009:029 MASTER'S THESIS Collocating Satellite-Based Radar and Radiometer Measurements to Develop an Ice Water Path Retrieval Gerrit Holl Luleå University of Technology Master Thesis, Continuation Courses Space Science and Technology Department of Space Science, Kiruna 2009:029 - ISSN: 1653-0187 - ISRN: LTU-PB-EX--09/029--SE Master's Thesis Collocating satellite-based radar and radiometer measurements to develop an ice water path retrieval Gerrit Holl June 11, 2009 Approximate footprints for different sensors 4480 CloudSat MHS 4460 HIRS AMSU−A 4440 4420 4400 4380 UTM y−pos (km) 4360 4340 4320 4300 390 400 410 420 430 440 450 460 470 480 UTM x−pos (km) Abstract Remote sensing satellites can roughly be divided in operational satellites and scientific satellites. Generally speaking, operational satellites have a long lifetime and often several near-identical copies, whereas scientific satellites are unique and have a more limited lifetime, but produce more advanced data. An example of a scientific satellite is the CloudSat, a NASA satellite flying in the so-called "A-Train" formation with other satellites. Examples of operational satellites are the NOAA and MetOp meteorological satellite series. CloudSat carries a 94 GHz nadir viewing radar instrument measuring pro- files of clouds. The NOAA-15 to NOAA-18 and MetOp-A satellites carry radiometers at various frequencies ranging from the infrared (3.76 µm) to around 183 GHz (≈ 1:6 mm). The full range is covered by the High Res- olution Infrared Radiation Sounder (HIRS) and the Advanced Microwave Sounding Units (AMSU-A and AMSU-B). On newer satellites, AMSU-B has been replaced by the Microwave Humidity Sounder (MHS) with nearly the same characteristics. -
Cloudsat-CALIPSO Launch
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION CloudSat-CALIPSO Launch Press Kit April 2006 Media Contacts Erica Hupp Policy/Program (202) 358-1237 NASA Headquarters, Management [email protected] Washington Alan Buis CloudSat Mission (818) 354-0474 NASA Jet Propulsion Laboratory, [email protected] Pasadena, Calif. Emily Wilmsen Colorado Role - CloudSat (970) 491-2336 Colorado State University, [email protected] Fort Collins, Colo. Julie Simard Canada Role - CloudSat (450) 926-4370 Canadian Space Agency, [email protected] Saint-Hubert, Quebec, Canada Chris Rink CALIPSO Mission (757) 864-6786 NASA Langley Research Center, [email protected] Hampton, Va. Eliane Moreaux France Role - CALIPSO 011 33 5 61 27 33 44 Centre National d'Etudes [email protected] Spatiales, Toulouse, France George Diller Launch Operations (321) 867-2468 NASA Kennedy Space Center, [email protected] Fla. Contents General Release ......................................................................................................................... 3 Media Services Information ........................................................................................................ 5 Quick Facts ................................................................................................................................. 6 Mission Overview ....................................................................................................................... 7 CloudSat Satellite .................................................................................................................... -

GPM Precipitation Estimation and Validation Activities
CGMS-36, NASA-WP-02 Prepared by NASA Agenda Item: WGII/4 Discussed in Working Groups GPM Precipitation Estimation and Validation Activities Precipitation estimation and validation activities of the Global Precipitation Measurement (GPM) mission, a NASA/JAXA joint satellite effort is reported as requested in CGMS-35 Action Item 35.22. An introduction to GPM, a status of GPM estimation and validation activities, and future plans are provided. CGMS-36, NASA-WP-02 1 Introduction The center piece of NASA’s activities on precipitation estimation and validation is its role in the Global Precipitation Measurement (GPM) mission, being developed primarily by NASA and the Japan Aerospace and Exploration Agency (JAXA). GPM marks an evolution from the current effort built around uncoordinated individual satellite missions towards one coordinated, inter-calibrated satellite constellation providing uniform global precipitation products. An important component as a starting point in creating this coordinated precipitation- measuring constellation already exists, in the form of the highly successful U.S.-Japan Tropical Rainfall Measuring Mission (TRMM), in operation since 1997, which continues to provide first-generation tropical precipitation estimates used in both societal applications and scientific research. The GPM mission will serve as the cornerstone for international collaboration on satellite precipitation algorithm research, ground validation, data processing, and product dissemination. To these ends, NASA is working with the international science community to develop a consensus reference standard for cross-calibration of microwave radiometers to produce uniform global precipitation products. NASA and JAXA have devoted substantial resources through TRMM and GPM in data processing and science team support, to include the development of Level 1C prototypes for intercalibration of current radiometers using the TRMM PR and TMI as a reference. -

Cloudsat Overview
CloudSat Overview CloudSat will provide, from space, the first global survey of cloud profiles and cloud physical properties, with seasonal and geographical variations, needed to evaluate the way clouds are parameterized in global models, thereby contributing to improved predictions of weather, climate and the cloud-climate feedback problem. CloudSat will measure the vertical structure of clouds and precipitation from space primarily through 94 GHz radar reflectivity measurements, but also by using a combination of observations from the EOS-PM Constellation of satellites (A-Train). CloudSat will fly in on-orbit formation with the Aqua and CALIPSO satellites, providing a unique, multi-satellite observing system particularly suited for studying the atmospheric processes of the hydrological cycle. 1. Science Objectives • Evaluate the representation of clouds in weather and climate prediction models. CloudSat will provide a global survey of the vertical structure of cloud systems: This vertical structure is fundamentally important for understanding how clouds affect both their local and large-scale atmospheric and radiative environments. • Evaluate the relationship between cloud liquid water and ice content and the radiative properties of clouds. CloudSat will estimate the profiles of cloud liquid water and ice water content. These are the quantities predicted by cloud-process and global-scale models alike and determine practically all important cloud properties, including precipitation and cloud optical properties. CloudSat will provide coincident profile information on the bulk cloud microphysical properties matched to cloud optical properties. Optical properties contrasted against cloud liquid water and ice contents provide a critical test of key parameterizations that enable calculation of flux profiles and radiative heating rates throughout the atmospheric column. -

Study of Persistent Pollution in Hefei During Winter Revealed by Ground-Based Lidar and the CALIPSO Satellite
sustainability Article Study of Persistent Pollution in Hefei during Winter Revealed by Ground-Based LiDAR and the CALIPSO Satellite Zhiyuan Fang 1,2,3, Hao Yang 1,2,3, Ye Cao 1,2,3, Kunming Xing 1,3, Dong Liu 1,3, Ming Zhao 1,3,* and Chenbo Xie 1,3,* 1 Key Laboratory of Atmospheric Optics, Anhui Institute of Optics and Fine Mechanics, Chinese Academy of Sciences, Hefei 230031, China; [email protected] (Z.F.); [email protected] (H.Y.); [email protected] (Y.C.); [email protected] (K.X.); [email protected] (D.L.) 2 Science Island Branch of Graduate School, University of Science and Technology of China, Hefei 230026, China 3 Advanced Laser Technology Laboratory of Anhui Province, Hefei 230037, China * Correspondence: [email protected] (M.Z.); [email protected] (C.X.); Tel.: +86-158-0091-7395 (M.Z.); +86-151-5597-3263 (C.X.) Abstract: LiDAR and CALIPSO satellites are effective tools for detecting air pollution, and by employing PM2.5 observation data, ground-based LiDAR measurements, CALIPSO satellite data, meteorological data, and back-trajectory analysis, we analyzed the process of pollution (moderate pollution, heavy pollution, excellent weather, and dust transmission weather) in Hefei, China from 24 to 27 January 2019 and analyzed the meteorological conditions and pollutants causing heavy pollution. Observation data from the ground station showed that the concentrations of PM10 and 3 PM2.5 increased significantly on 25 January; the maximum value of PM10 was 175 µg/m , and 3 the maximum value of PM2.5 was 170 µg/m . -
Cloudsat and Quikscat - to Observe Clouds and Sea Surface Winds
.JPL NASA Spaceborne Ra.dar Missions - CloudSat and QuikScat - To Observe Clouds and Sea Surface Winds To be presented in Taiwan during "Symposium on Application of Remote Sensing for Disaster Monitoring and Mitigation" Chialin Wu Principal Engineer NASA I Jet Propulsion Laboratory Pasadena, CA, 91107 USA December 4, 2006 To JPL/NASA Document Review and Approval: All slides in this package are assembled from following sources: 1) Paper by E. lm, S. Durden et al, presented in I GRASS 06 Conference, "Early Results on Cloud Profiling Radar Post-launch Calibration and Operations" (JPL Clearance CL#06-1158) 2) NASA Public Information Web Sites on CloudSat and QuikSat Missions. December 4, 2006 (http://www.nasa.gov/mission_pages/cloudsat/main/index.html and http://winds.jpl.nasa.gov/index.cfin) Why Active Radar Sensors ~PL - Sensors that can react to or interrogate the objects' physical properties -Microwave Radar Scatterometer of 13.4 GHz center frequency can see through clouds. By measuring sea surface roughness from several observation angles, one can infer sea surface wind speeds and directions. The QuikScat Satellite has been operating in space for more than seven years, since its launch in 1999. - The new CloudSat Satellite carries a 94 GHz nadir looking radar. It is capable of detecting clouds' ice particles and water droplets. It can then observe vertical structure profiles of clouds under the sensor path. - Such sensors are useful in observing and monitor the formation and the three dimensional processes of storms over ocean area. December 4, 2006 2 The QuikScat Scatterometer .JPL NASA's QuikSCAT Scatterometer lofted into space on June 19, 1999, and has been operating in space since then.