Design Patterns for Multiphysics Modeling in Fortran 2003 and C++
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
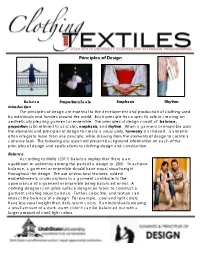
Principles of Design
Principles of Design Balance Proportion/Scale Emphasis Rhythm Introduction The principles of design are essential to the development and production of clothing used by individuals and families around the world. Each principle has a specific role in creating an aesthetically pleasing garment or ensemble. The principles of design consist of: balance, proportion (also referred to as scale), emphasis, and rhythm. When a garment or ensemble uses the elements and principles of design to create a visual unity, harmony is achieved. Garments often integrate more than one principle, while drawing from the elements of design to create a cohesive look. The following discussion will present background information on each of the principles of design and applications to clothing design and construction. Balance According to Wolfe (2011) balance implies that there is an equilibrium or uniformity among the parts of a design (p. 205). To achieve balance, a garment or ensemble should have equal visual weight throughout the design. The use of structural features, added embellishments, or decorations to a garment contribute to the appearance of a garment or ensemble being balanced or not. A clothing designer can utilize surface designs on fabric to construct a garment creating visual balance. Further, color, line, and texture can impact the balance of a design. For example, cool and light colors have less visual weight than dark, warm colors. If an individual is wearing a small amount of a dark, warm color it can be balanced out with a larger amount of cool, light colors. Balance used in clothing design can be categorized into two groups: Formal and Informal Balance. -

Pattern Languages in HCI: a Critical Review
HUMAN–COMPUTER INTERACTION, 2006, Volume 21, pp. 49–102 Copyright © 2006, Lawrence Erlbaum Associates, Inc. Pattern Languages in HCI: A Critical Review Andy Dearden Sheffield Hallam University Janet Finlay Leeds Metropolitan University ABSTRACT This article presents a critical review of patterns and pattern languages in hu- man–computer interaction (HCI). In recent years, patterns and pattern languages have received considerable attention in HCI for their potential as a means for de- veloping and communicating information and knowledge to support good de- sign. This review examines the background to patterns and pattern languages in HCI, and seeks to locate pattern languages in relation to other approaches to in- teraction design. The review explores four key issues: What is a pattern? What is a pattern language? How are patterns and pattern languages used? and How are values reflected in the pattern-based approach to design? Following on from the review, a future research agenda is proposed for patterns and pattern languages in HCI. Andy Dearden is an interaction designer with an interest in knowledge sharing and communication in software development. He is a senior lecturer in the Com- munication and Computing Research Centre at Sheffield Hallam University. Janet Finlay is a usability researcher with an interest in design communication and systems evaluation. She is Professor of Interactive Systems in Innovation North at Leeds Metropolitan University. 50 DEARDEN AND FINLAY CONTENTS 1. INTRODUCTION 2. THE SCOPE OF THIS REVIEW 2.1. General Software Design Patterns 2.2. Interface Software Design Patterns 2.3. Interaction Design Patterns 3. A SHORT HISTORY OF PATTERNS 3.1. -

GREATER GOLDEN HILL COMMUNITY PLAN UPDATE CHARRETTE 1 – Written Comments from Community Participants
GREATER GOLDEN HILL COMMUNITY PLAN UPDATE CHARRETTE 1 – Written Comments from Community Participants DRAFT October 9, 2010 Table 1 10 Things you Love about your Community - Golf course - open space - Dog park - Trails near the dog park canyon - Walkability - Eclectic architecture - Local businesses - Community-oriented events (Old House Fair, Walkabout, etc.) - Diversity - Natural views - Art spaces - The natural view - Connection to the park - Access/ proximity to downtown/ Balboa 10 Simple Improvements - Golf Course Open Space Add a walk path – make it safe all around the park Wildlife access Expand more family access to east end of park between Rec Center & 28th St. (use up some golf course space) - Improve connection to Balboa Park, improve street access & walkablility - Increase maintenance district funds for park? - Possible use of maintenance district funds for street repairs & lighting - Need a larger community center - 25th & F - idea for community center? - 25th & F – church for lease? - What to do for closed post office? - Bring the streetcar/ trolley to 30th & Fern - There are 2 auto shops near C & 25th - Underground the power lines - More street art - Enforce code on street signs and advertisements - Improve jogging & bike path around the golf course *All comments written herein are direct transcriptions of notes collected from each table as well as notes taken during the report back sessions of the workshop Golden Hill Charrette 1 – Comments - More walking trails - Improve sidewalks - lighting - More playgrounds - Rezone 25th street - Library/ Cultural Center/ Community Center - Need a Golden Hill sign (like Hillcrest or North Park) - Streetcar/Trolley Streets & Connections - Public art - Bus stops designed by a local artists competition - Community plazas and fountains - Entry signage for Golden Hill & South Park - Bike racks @ all destinations - Green Streets - Improve Russ Blvd. -

Application Design Patterns Catalogue
Design Patterns Catalogue AUTOSAR Release 4.2.2 Document Title Design Patterns Catalogue Document Owner AUTOSAR Document Responsibility AUTOSAR Document Identification No 672 Document Classification Auxiliary Document Status Final Part of AUTOSAR Release 4.2.2 Document Change History Release Changed by Description • reconsideration of signal definitions and tailored AUTOSAR pattern for smart actuators and actuators with no 4.2.2 Release feedback loop Management • specification items added • minor changes • First Release of document. Patterns covered: AUTOSAR – Sensor and Actuator Pattern 4.2.1 Release – Arbitration of Several Set-point Requester Management Pattern • Previously published as part of EXP_AIPowertrain 1 of 46 Document ID 672: AUTOSAR_TR_AIDesignPatternsCatalogue — AUTOSAR CONFIDENTIAL — Design Patterns Catalogue AUTOSAR Release 4.2.2 Disclaimer This specification and the material contained in it, as released by AUTOSAR, is for the purpose of information only. AUTOSAR and the companies that have contributed to it shall not be liable for any use of the specification. The material contained in this specification is protected by copyright and other types of Intellectual Property Rights. The commercial exploitation of the material contained in this specification requires a license to such Intellectual Property Rights. This specification may be utilized or reproduced without any modification, in any form or by any means, for informational purposes only. For any other purpose, no part of the specification may be utilized or reproduced, in any form or by any means, without permission in writing from the publisher. The AUTOSAR specifications have been developed for automotive applications only. They have neither been developed, nor tested for non-automotive applications. -

Pattern Design Pdf, Epub, Ebook
PATTERN DESIGN PDF, EPUB, EBOOK Lewis Foreman Day | 306 pages | 28 Mar 2003 | Dover Publications Inc. | 9780486407098 | English | New York, United States Pattern Design PDF Book Via Harris Scarfe. In our hotel example, we broke the established pattern. The Justine skirt pattern makes a flattering A-line high-waisted skirt with a midi length. Although technically they should include a repetition to qualify as a complete pattern, in many cases they are only hinted at for lack of space—such as on packaging or in corporate designs. They're also time-savers. Colorful bird feather seam… Floral. Research shows that people look for relationships between values, and patterns reinforce those relationships. Especially the marble effect seems to be everywhere lately. People perceive that closely-placed elements are related, especially if separated from other groups by even more space. Depending on the colors you use, you can complement and emphasize your logo, headline or product pictures. Similarly, a black and white pattern can make a powerful statement. Create a flat front skirt for your wardrobe with this free pattern and tutorial. Nothing happens. This design for a sea food restaurant uses a lovely mix of communicative and geometric patterns. Via Mary Rabun for Birchbox. Often they occur naturally—think trees in a forest or sea shells on a beach. Get a design. Hello, thank you so much for the website! This is one of the most comprehensive sites that I have come across. In the case of a hotel-finding site, we must present users with relevant search results so they can make an informed decision. -
Java Design Patterns I
Java Design Patterns i Java Design Patterns Java Design Patterns ii Contents 1 Introduction to Design Patterns 1 1.1 Introduction......................................................1 1.2 What are Design Patterns...............................................1 1.3 Why use them.....................................................2 1.4 How to select and use one...............................................2 1.5 Categorization of patterns...............................................3 1.5.1 Creational patterns..............................................3 1.5.2 Structural patterns..............................................3 1.5.3 Behavior patterns...............................................3 2 Adapter Design Pattern 5 2.1 Adapter Pattern....................................................5 2.2 An Adapter to rescue.................................................6 2.3 Solution to the problem................................................7 2.4 Class Adapter..................................................... 11 2.5 When to use Adapter Pattern............................................. 12 2.6 Download the Source Code.............................................. 12 3 Facade Design Pattern 13 3.1 Introduction...................................................... 13 3.2 What is the Facade Pattern.............................................. 13 3.3 Solution to the problem................................................ 14 3.4 Use of the Facade Pattern............................................... 16 3.5 Download the Source Code............................................. -

Software Design Pattern Using : Algorithmic Skeleton Approach S
International Journal of Computer Network and Security (IJCNS) Vol. 3 No. 1 ISSN : 0975-8283 Software Design Pattern Using : Algorithmic Skeleton Approach S. Sarika Lecturer,Department of Computer Sciene and Engineering Sathyabama University, Chennai-119. [email protected] Abstract - In software engineering, a design pattern is a general reusable solution to a commonly occurring problem in software design. A design pattern is not a finished design that can be transformed directly into code. It is a description or template for how to solve a problem that can be used in many different situations. Object-oriented design patterns typically show relationships and interactions between classes or objects, without specifying the final application classes or objects that are involved. Many patterns imply object-orientation or more generally mutable state, and so may not be as applicable in functional programming languages, in which data is immutable Fig 1. Primary design pattern or treated as such..Not all software patterns are design patterns. For instance, algorithms solve 1.1Attributes related to design : computational problems rather than software design Expandability : The degree to which the design of a problems.In this paper we try to focous the system can be extended. algorithimic pattern for good software design. Simplicity : The degree to which the design of a Key words - Software Design, Design Patterns, system can be understood easily. Software esuability,Alogrithmic pattern. Reusability : The degree to which a piece of design can be reused in another design. 1. INTRODUCTION Many studies in the literature (including some by 1.2 Attributes related to implementation: these authors) have for premise that design patterns Learn ability : The degree to which the code source of improve the quality of object-oriented software systems, a system is easy to learn. -

Pattern Changing Clothing
Rochester Institute of Technology RIT Scholar Works Theses 4-17-2013 Pattern changing clothing Yong Kwon Follow this and additional works at: https://scholarworks.rit.edu/theses Recommended Citation Kwon, Yong, "Pattern changing clothing" (2013). Thesis. Rochester Institute of Technology. Accessed from This Thesis is brought to you for free and open access by RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. April 17 Pattern Changing Clothing 2013 Author – Yong hwan Kwon Degree – Master of Fine Arts Program – Industrial Design Rochester Institute of Technology College of Imaging Arts & Sciences Pattern Changing Clothing by yong hwan Kwon Approvals Stan Rickel, Chief Advisor & Committee Member Associate Professor, Graduate Program Chair, Industrial Design Signature: Date: Marla K Schweppe, Associate Advisor & Committee Member Professor, Computer Graphic Design Signature: Date: W. Michelle Harris, Associate Advisor & Committee Member Associate Professor, Interactive Game & Media Signature: Date: 1 Table of Contents Abstract 5 01 Introduction 6 02 Design Background 8 - The History of Textile Technology - The History of Modern fashion - Fashioning Technology - Fashioning Technology - Considerations - Futuristic Clothing 03 Design Motivation 18 - Individuality in Fashion - Expressive Ways of individuality - Mass Customization 04 Problems of Current Clothing 25 - Irrational Consumption of Clothing - Waste of Natural -

Design Patterns for Functional Strategic Programming
Design Patterns for Functional Strategic Programming Ralf Lammel¨ Joost Visser Vrije Universiteit CWI De Boelelaan 1081a P.O. Box 94079 NL-1081 HV Amsterdam 1090 GB Amsterdam The Netherlands The Netherlands [email protected] [email protected] Abstract 1 Introduction We believe that design patterns can be an effective means of con- The notion of a design pattern is well-established in object-oriented solidating and communicating program construction expertise for programming. A pattern systematically names, motivates, and ex- functional programming, just as they have proven to be in object- plains a common design structure that addresses a certain group of oriented programming. The emergence of combinator libraries that recurring program construction problems. Essential ingredients in develop a specific domain or programming idiom has intensified, a pattern are its applicability conditions, the trade-offs of applying rather than reduced, the need for design patterns. it, and sample code that demonstrates its application. In previous work, we introduced the fundamentals and a supporting We contend that design patterns can be an effective means of con- combinator library for functional strategic programming. This is solidating and communicating program construction expertise for an idiom for (general purpose) generic programming based on the functional programming just as they have proven to be in object- notion of a functional strategy: a first-class generic function that oriented programming. One might suppose that the powerful ab- can not only be applied to terms of any type, but which also allows straction mechanisms of functional programming obviate the need generic traversal into subterms and can be customised with type- for design patterns, since many pieces of program construction specific behaviour. -

A Study of Design Pattern Grime and Its Impact on Quality and Technical
DESIGN PATTERN DECAY { A STUDY OF DESIGN PATTERN GRIME AND ITS IMPACT ON QUALITY AND TECHNICAL DEBT by Isaac Daniel Griffith A dissertation proposal submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Computer Science MONTANA STATE UNIVERSITY Bozeman, Montana October, 2015 ©COPYRIGHT by Isaac Daniel Griffith 2015 All Rights Reserved ii TABLE OF CONTENTS 1. INTRODUCTION ........................................................................................1 Motivation....................................................................................................1 Organization.................................................................................................3 2. BACKGROUND AND RELATED WORK.....................................................4 Software Aging and Decay.............................................................................4 Design Disharmonies .................................................................................4 Code Smells ..........................................................................................4 Anti-Patterns ........................................................................................5 Modularity Violations ............................................................................5 Design Pattern Disharmonies..................................................................5 Design Disharmony Detection ....................................................................8 Design Disharmonies and Quality............................................................ -

Web Design Patterns for Mobile Devices
Web Design Patterns for Mobile Devices JORGE RIBEIRO, Faculdade de Engenharia, Universidade do Porto MIGUEL CARVALHAIS, ID+ / Faculdade de Belas Artes, Universidade do Porto Mobile devices have brought new constraints and possibilities to the field of web design. You can no longer design a website without thinking how it will work on a mobile device: the whole mobile experience needs to be designed from the beginning. Because designing for these devices is considerably different from designing for wider screens, you cannot only rely on your old techniques: you will need new ones. In this paper we propose a set of twenty-one patterns for designing web interfaces on mobile devices. 1. INTRODUCTION The patterns proposed on this paper began from the interest to further explore the design of interfaces, particularly web interfaces, on mobile devices. We currently have at our disposal a new, universe of portable devices that follow us wherever we go, are always on, and have continuous and easy access to the web. We also have gestural interfaces that provide for more natural and appealing interactions. Because these devices are relatively new, there are not strong standards or guidelines to help us to design for them. Moreover, because of their novelty, users do not have so rigid expectations of how an interface should be, as they may have for desktop environments. We think that this places us in a favorable position to explore new types of interactions, and to reinforce the importance and need to research new ways to improve the design of dedicated interfaces for mobile devices. -

UD Co-Spaces: a Table-Centred Multi-Display Environment for Public Engagement in Urban Design Charrettes
UD Co-Spaces: A Table-Centred Multi-Display Environment for Public Engagement in Urban Design Charrettes N. Mahyar, K. J. Burke, J. Xiang, S. Meng, K. S. Booth, C. L. Girling, and R. W. Kellett The University of British Columbia, Vancouver, BC V6T 1Z4, CANADA fnmayhar,jlxiang,mengxixi,[email protected], [email protected], and fcgirling,[email protected] ABSTRACT UD Co-Spaces is centered on a multi-user tabletop display UD Co-Spaces (Urban Design Collaborative Spaces) is an in- that enables stakeholders to collaboratively design the fu- tegrated, tabletop-centered multi-display environment for en- ture of a neighbourhood through direct multi-touch manipu- gaging the public in the complex process of collaborative ur- lation of planning options, interactively explore design alter- ban design. We describe the iterative user-centered process natives, and cross-check with sustainability indicators in real that we followed over six years through a close interdisci- time during a session. It includes auxiliary wall displays and plinary collaboration involving experts in urban design and hand-held individual displays that extend the functionality of neighbourhood planning. Versions of UD Co-Spaces were the tabletop to better support Arnstein’s notion of engagement deployed in five real-world charrettes (planning workshops) for users [2]. The interdisciplinary project is a long-term col- with 83 participants, a heuristic evaluation with three domain laboration involving a team of human-computer interaction experts, and a qualitative laboratory study with 37 partici- (HCI), computer-supported cooperative work (CSCW), urban pants. We reflect on our design decisions and how multi- design, and public engagement researchers.