The CHREST Architecture of Cognition the Role of Perception in General Intelligence
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Protein Interaction Extraction Systemusing a Link Grammar Parser from Biomedical Abstracts
World Academy of Science, Engineering and Technology International Journal of Biomedical and Biological Engineering Vol:1, No:5, 2007 PIELG: A Protein Interaction Extraction System using a Link Grammar Parser from Biomedical Abstracts Rania A. Abul Seoud, Nahed H. Solouma, Abou-Baker M. Youssef, and Yasser M. Kadah, Senior Member, IEEE failure. Applications that repair or replace portions of or Abstract—Due to the ever growing amount of publications about whole living tissues (e.g., bone, dentine, or bladder) using protein-protein interactions, information extraction from text is living cells is named Tissue Engineering (TE). For example, increasingly recognized as one of crucial technologies in dentine formation is the process of regenerating dental tissues bioinformatics. This paper presents a Protein Interaction Extraction by tissue engineering principles and technology. Dentine System using a Link Grammar Parser from biomedical abstracts formation is governed by biological mediators or growth (PIELG). PIELG uses linkage given by the Link Grammar Parser to start a case based analysis of contents of various syntactic roles as factors (protein) and interactions amongst different proteins. well as their linguistically significant and meaningful combinations. Dentine formation needs the support of continuous updated The system uses phrasal-prepositional verbs patterns to overcome information about protein-protein interactions. preposition combinations problems. The recall and precision are Researches in the last decade have resulted in the 74.4% and 62.65%, respectively. Experimental evaluations with two production of a large amount of information about protein other state-of-the-art extraction systems indicate that PIELG system functions involved in dentine formation process. That achieves better performance. -

Implementing a Portable Clinical NLP System with a Common Data Model: a Lisp Perspective
Implementing a portable clinical NLP system with a common data model: a Lisp perspective The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Luo, Yuan, and Peter Szolovits, "Implementing a portable clinical NLP system with a common data model: a Lisp perspective." Proceedings, 2018 IEEE International Conference on Bioinformatics and Biomedicine (BIBM 2018), December 3-6, 2018, Madrid, Spain (Piscataway, N.J.: IEEE, 2018): doi 10.1109/BIBM.2018.8621521 ©2018 Author(s) As Published 10.1109/BIBM.2018.8621521 Publisher Institute of Electrical and Electronics Engineers (IEEE) Version Original manuscript Citable link https://hdl.handle.net/1721.1/124439 Terms of Use Creative Commons Attribution-Noncommercial-Share Alike Detailed Terms http://creativecommons.org/licenses/by-nc-sa/4.0/ Implementing a Portable Clinical NLP System with a Common Data Model – a Lisp Perspective Yuan Luo* Peter Szolovits* Dept. of Preventive Medicine CSAIL Northwestern University MIT Chicago, USA Cambridge, USA [email protected] [email protected] Abstract— This paper presents a Lisp architecture for a annotations, often in idiosyncratic representations. This makes portable NLP system, termed LAPNLP, for processing clinical it quite difficult to chain together sequences of operations. Alt- notes. LAPNLP integrates multiple standard, customized and hough several recent projects have achieved reasonable in-house developed NLP tools. Our system facilitates portability success in analyzing certain types of clinical narratives [3-6], across different institutions and data systems by incorporating an enriched Common Data Model (CDM) to standardize neces- efforts towards a common data model (CDM) to ensure port- sary data elements. -
Chapter 14: Dependency Parsing
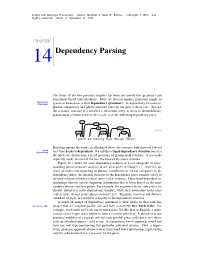
Speech and Language Processing. Daniel Jurafsky & James H. Martin. Copyright © 2021. All rights reserved. Draft of September 21, 2021. CHAPTER 14 Dependency Parsing The focus of the two previous chapters has been on context-free grammars and constituent-based representations. Here we present another important family of dependency grammars grammar formalisms called dependency grammars. In dependency formalisms, phrasal constituents and phrase-structure rules do not play a direct role. Instead, the syntactic structure of a sentence is described solely in terms of directed binary grammatical relations between the words, as in the following dependency parse: root dobj det nmod (14.1) nsubj nmod case I prefer the morning flight through Denver Relations among the words are illustrated above the sentence with directed, labeled typed dependency arcs from heads to dependents. We call this a typed dependency structure because the labels are drawn from a fixed inventory of grammatical relations. A root node explicitly marks the root of the tree, the head of the entire structure. Figure 14.1 shows the same dependency analysis as a tree alongside its corre- sponding phrase-structure analysis of the kind given in Chapter 12. Note the ab- sence of nodes corresponding to phrasal constituents or lexical categories in the dependency parse; the internal structure of the dependency parse consists solely of directed relations between lexical items in the sentence. These head-dependent re- lationships directly encode important information that is often buried in the more complex phrase-structure parses. For example, the arguments to the verb prefer are directly linked to it in the dependency structure, while their connection to the main verb is more distant in the phrase-structure tree. -

Understanding Agent Incentives Using Causal Influence Diagrams
Understanding Agent Incentives using Causal Influence Diagrams∗ Part I: Single Decision Settings Tom Everitt Pedro A. Ortega Elizabeth Barnes Shane Legg September 9, 2019 Deepmind Agents are systems that optimize an objective function in an environ- ment. Together, the goal and the environment induce secondary objectives, incentives. Modeling the agent-environment interaction using causal influ- ence diagrams, we can answer two fundamental questions about an agent’s incentives directly from the graph: (1) which nodes can the agent have an incentivize to observe, and (2) which nodes can the agent have an incentivize to control? The answers tell us which information and influence points need extra protection. For example, we may want a classifier for job applications to not use the ethnicity of the candidate, and a reinforcement learning agent not to take direct control of its reward mechanism. Different algorithms and training paradigms can lead to different causal influence diagrams, so our method can be used to identify algorithms with problematic incentives and help in designing algorithms with better incentives. Contents 1. Introduction 2 2. Background 3 3. Observation Incentives 7 4. Intervention Incentives 13 arXiv:1902.09980v6 [cs.AI] 6 Sep 2019 5. Related Work 19 6. Limitations and Future Work 22 7. Conclusions 23 References 24 A. Representing Uncertainty 29 B. Proofs 30 ∗ A number of people have been essential in preparing this paper. Ryan Carey, Eric Langlois, Michael Bowling, Tim Genewein, James Fox, Daniel Filan, Ray Jiang, Silvia Chiappa, Stuart Armstrong, Paul Christiano, Mayank Daswani, Ramana Kumar, Jonathan Uesato, Adria Garriga, Richard Ngo, Victoria Krakovna, Allan Dafoe, and Jan Leike have all contributed through thoughtful discussions and/or by reading drafts at various stages of this project. -

Development of a Persian Syntactic Dependency Treebank
Development of a Persian Syntactic Dependency Treebank Mohammad Sadegh Rasooli Manouchehr Kouhestani Amirsaeid Moloodi Department of Computer Science Department of Linguistics Department of Linguistics Columbia University Tarbiat Modares University University of Tehran New York, NY Tehran, Iran Tehran, Iran [email protected] [email protected] [email protected] Abstract tions in tasks such as machine translation. Depen- dency treebanks are collections of sentences with This paper describes the annotation process their corresponding dependency trees. In the last and linguistic properties of the Persian syn- decade, many dependency treebanks have been de- tactic dependency treebank. The treebank veloped for a large number of languages. There are consists of approximately 30,000 sentences at least 29 languages for which at least one depen- annotated with syntactic roles in addition to morpho-syntactic features. One of the unique dency treebank is available (Zeman et al., 2012). features of this treebank is that there are al- Dependency trees are much more similar to the hu- most 4800 distinct verb lemmas in its sen- man understanding of language and can easily rep- tences making it a valuable resource for ed- resent the free word-order nature of syntactic roles ucational goals. The treebank is constructed in sentences (Kubler¨ et al., 2009). with a bootstrapping approach by means of available tagging and parsing tools and man- Persian is a language with about 110 million ually correcting the annotations. The data is speakers all over the world (Windfuhr, 2009), yet in splitted into standard train, development and terms of the availability of teaching materials and test set in the CoNLL dependency format and annotated data for text processing, it is undoubt- is freely available to researchers. -

Downloads." the Open Information Security Foundation
Performance Testing Suricata The Effect of Configuration Variables On Offline Suricata Performance A Project Completed for CS 6266 Under Jonathon T. Giffin, Assistant Professor, Georgia Institute of Technology by Winston H Messer Project Advisor: Matt Jonkman, President, Open Information Security Foundation December 2011 Messer ii Abstract The Suricata IDS/IPS engine, a viable alternative to Snort, has a multitude of potential configurations. A simplified automated testing system was devised for the purpose of performance testing Suricata in an offline environment. Of the available configuration variables, seventeen were analyzed independently by testing in fifty-six configurations. Of these, three variables were found to have a statistically significant effect on performance: Detect Engine Profile, Multi Pattern Algorithm, and CPU affinity. Acknowledgements In writing the final report on this endeavor, I would like to start by thanking four people who made this project possible: Matt Jonkman, President, Open Information Security Foundation: For allowing me the opportunity to carry out this project under his supervision. Victor Julien, Lead Programmer, Open Information Security Foundation and Anne-Fleur Koolstra, Documentation Specialist, Open Information Security Foundation: For their willingness to share their wisdom and experience of Suricata via email for the past four months. John M. Weathersby, Jr., Executive Director, Open Source Software Institute: For allowing me the use of Institute equipment for the creation of a suitable testing -

Lexicalization and Grammar Development
University of Pennsylvania ScholarlyCommons IRCS Technical Reports Series Institute for Research in Cognitive Science April 1995 Lexicalization and Grammar Development B. Srinivas University of Pennsylvania Dania Egedi University of Pennsylvania Christine D. Doran University of Pennsylvania Tilman Becker University of Pennsylvania Follow this and additional works at: https://repository.upenn.edu/ircs_reports Srinivas, B.; Egedi, Dania; Doran, Christine D.; and Becker, Tilman, "Lexicalization and Grammar Development" (1995). IRCS Technical Reports Series. 138. https://repository.upenn.edu/ircs_reports/138 University of Pennsylvania Institute for Research in Cognitive Science Technical Report No. IRCS-95-12. This paper is posted at ScholarlyCommons. https://repository.upenn.edu/ircs_reports/138 For more information, please contact [email protected]. Lexicalization and Grammar Development Abstract In this paper we present a fully lexicalized grammar formalism as a particularly attractive framework for the specification of natural language grammars. We discuss in detail Feature-based, Lexicalized Tree Adjoining Grammars (FB-LTAGs), a representative of the class of lexicalized grammars. We illustrate the advantages of lexicalized grammars in various contexts of natural language processing, ranging from wide-coverage grammar development to parsing and machine translation. We also present a method for compact and efficientepr r esentation of lexicalized trees. In diesem Beitrag präsentieren wir einen völlig lexikalisierten Grammatikformalismus als eine besonders geeignete Basis für die Spezifikation onv Grammatiken für natürliche Sprachen. Wir stellen feature- basierte, lexikalisierte Tree Adjoining Grammars (FB-LTAGs) vor, ein Vertreter der Klasse der lexikalisierten Grammatiken. Wir führen die Vorteile von lexikalisierten Grammatiken in verschiedenen Bereichen der maschinellen Sprachverarbeitung aus; von der Entwicklung von Grammatiken für weite Sprachbereiche über Parsing bis zu maschineller Übersetzung. -

Tarski's Threat to the T-Schema
Tarski’s Threat to the T-Schema MSc Thesis (Afstudeerscriptie) written by Cian Chartier (born November 10th, 1986 in Montr´eal, Canada) under the supervision of Prof. dr. Frank Veltman, and submitted to the Board of Examiners in partial fulfillment of the requirements for the degree of MSc in Logic at the Universiteit van Amsterdam. Date of the public defense: Members of the Thesis Committee: August 30, 2011 Prof. Dr. Frank Veltman Prof. Dr. Michiel van Lambalgen Prof. Dr. Benedikt L¨owe Dr. Robert van Rooij Abstract This thesis examines truth theories. First, four relevant programs in philos- ophy are considered. Second, four truth theories are compared according to a range of criteria. The truth theories are categorised according to Leitgeb’s eight criteria for a truth theory. The four truth theories are then compared with each-other based on three new criteria. In this way their relative use- fulness in pursuing some of the aims of the four programs is evaluated. This presents a springboard for future work on truth: proposing ideas for differ- ent truth theories that advance unambiguously different programs on the basis of the four truth theories proposed. 1 Acknowledgements I first thank my supervisor Prof. Dr. Frank Veltman for regularly read- ing and providing constructive feedback, recommending some papers along the way. This thesis has been much improved by his corrections and input, including extensive discussions and suggestions of the ideas proposed here. His patience in working with me on the thesis has been much appreciated. Among the other professors in the ILLC, Dr. Robert van Rooij also provided helpful discussion. -

Approximate Universal Artificial Intelligence And
APPROXIMATEUNIVERSALARTIFICIAL INTELLIGENCE AND SELF-PLAY LEARNING FORGAMES Doctor of Philosophy Dissertation School of Computer Science and Engineering joel veness supervisors Kee Siong Ng Marcus Hutter Alan Blair William Uther John Lloyd January 2011 Joel Veness: Approximate Universal Artificial Intelligence and Self-play Learning for Games, Doctor of Philosophy Disserta- tion, © January 2011 When we write programs that learn, it turns out that we do and they don’t. — Alan Perlis ABSTRACT This thesis is split into two independent parts. The first is an investigation of some practical aspects of Marcus Hutter’s Uni- versal Artificial Intelligence theory [29]. The main contributions are to show how a very general agent can be built and analysed using the mathematical tools of this theory. Before the work presented in this thesis, it was an open question as to whether this theory was of any relevance to reinforcement learning practitioners. This work suggests that it is indeed relevant and worthy of future investigation. The second part of this thesis looks at self-play learning in two player, determin- istic, adversarial turn-based games. The main contribution is the introduction of a new technique for training the weights of a heuristic evaluation function from data collected by classical game tree search algorithms. This method is shown to outperform previous self-play training routines based on Temporal Difference learning when applied to the game of Chess. In particular, the main highlight was using this technique to construct a Chess program that learnt to play master level Chess by tuning a set of initially random weights from self play games. -
![Arxiv:2010.12268V1 [Cs.LG] 23 Oct 2020 Trained on a New Target Task Rapidly Loses in Its Ability to Solve Previous Source Tasks](https://docslib.b-cdn.net/cover/1099/arxiv-2010-12268v1-cs-lg-23-oct-2020-trained-on-a-new-target-task-rapidly-loses-in-its-ability-to-solve-previous-source-tasks-1111099.webp)
Arxiv:2010.12268V1 [Cs.LG] 23 Oct 2020 Trained on a New Target Task Rapidly Loses in Its Ability to Solve Previous Source Tasks
A Combinatorial Perspective on Transfer Learning Jianan Wang Eren Sezener David Budden Marcus Hutter Joel Veness DeepMind [email protected] Abstract Human intelligence is characterized not only by the capacity to learn complex skills, but the ability to rapidly adapt and acquire new skills within an ever-changing environment. In this work we study how the learning of modular solutions can allow for effective generalization to both unseen and potentially differently distributed data. Our main postulate is that the combination of task segmentation, modular learning and memory-based ensembling can give rise to generalization on an exponentially growing number of unseen tasks. We provide a concrete instantiation of this idea using a combination of: (1) the Forget-Me-Not Process, for task segmentation and memory based ensembling; and (2) Gated Linear Networks, which in contrast to contemporary deep learning techniques use a modular and local learning mechanism. We demonstrate that this system exhibits a number of desirable continual learning properties: robustness to catastrophic forgetting, no negative transfer and increasing levels of positive transfer as more tasks are seen. We show competitive performance against both offline and online methods on standard continual learning benchmarks. 1 Introduction Humans learn new tasks from a single temporal stream (online learning) by efficiently transferring experience of previously encountered tasks (continual learning). Contemporary machine learning algorithms struggle in both of these settings, and few attempts have been made to solve challenges at their intersection. Despite obvious computational inefficiencies, the dominant machine learning paradigm involves i.i.d. sampling of data at massive scale to reduce gradient variance and stabilize training via back-propagation. -

On the Differences Between Human and Machine Intelligence
On the Differences between Human and Machine Intelligence Roman V. Yampolskiy Computer Science and Engineering, University of Louisville [email protected] Abstract [Legg and Hutter, 2007a]. However, widespread implicit as- Terms Artificial General Intelligence (AGI) and Hu- sumption of equivalence between capabilities of AGI and man-Level Artificial Intelligence (HLAI) have been HLAI appears to be unjustified, as humans are not general used interchangeably to refer to the Holy Grail of Ar- intelligences. In this paper, we will prove this distinction. tificial Intelligence (AI) research, creation of a ma- Others use slightly different nomenclature with respect to chine capable of achieving goals in a wide range of general intelligence, but arrive at similar conclusions. “Lo- environments. However, widespread implicit assump- cal generalization, or “robustness”: … “adaptation to tion of equivalence between capabilities of AGI and known unknowns within a single task or well-defined set of HLAI appears to be unjustified, as humans are not gen- tasks”. … Broad generalization, or “flexibility”: “adapta- eral intelligences. In this paper, we will prove this dis- tion to unknown unknowns across a broad category of re- tinction. lated tasks”. …Extreme generalization: human-centric ex- treme generalization, which is the specific case where the 1 Introduction1 scope considered is the space of tasks and domains that fit within the human experience. We … refer to “human-cen- Imagine that tomorrow a prominent technology company tric extreme generalization” as “generality”. Importantly, as announces that they have successfully created an Artificial we deliberately define generality here by using human cog- Intelligence (AI) and offers for you to test it out. -
Universal Artificial Intelligence Philosophical, Mathematical, and Computational Foundations of Inductive Inference and Intelligent Agents the Learn
Universal Artificial Intelligence philosophical, mathematical, and computational foundations of inductive inference and intelligent agents the learn Marcus Hutter Australian National University Canberra, ACT, 0200, Australia http://www.hutter1.net/ ANU Universal Artificial Intelligence - 2 - Marcus Hutter Abstract: Motivation The dream of creating artificial devices that reach or outperform human intelligence is an old one, however a computationally efficient theory of true intelligence has not been found yet, despite considerable efforts in the last 50 years. Nowadays most research is more modest, focussing on solving more narrow, specific problems, associated with only some aspects of intelligence, like playing chess or natural language translation, either as a goal in itself or as a bottom-up approach. The dual, top down approach, is to find a mathematical (not computational) definition of general intelligence. Note that the AI problem remains non-trivial even when ignoring computational aspects. Universal Artificial Intelligence - 3 - Marcus Hutter Abstract: Contents In this course we will develop such an elegant mathematical parameter-free theory of an optimal reinforcement learning agent embedded in an arbitrary unknown environment that possesses essentially all aspects of rational intelligence. Most of the course is devoted to giving an introduction to the key ingredients of this theory, which are important subjects in their own right: Occam's razor; Turing machines; Kolmogorov complexity; probability theory; Solomonoff induction; Bayesian