Visual Analysis of Large, Time-Dependent, Multi-Dimensional Smart Sensor Tracking Data
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Visual Analytic Tools and Techniques in Population Health and Health Services Research: Scoping Review
JOURNAL OF MEDICAL INTERNET RESEARCH Chishtie et al Review Visual Analytic Tools and Techniques in Population Health and Health Services Research: Scoping Review Jawad Ahmed Chishtie1,2,3,4, MSc, MD; Jean-Sebastien Marchand5, PhD; Luke A Turcotte2,6, PhD; Iwona Anna Bielska7,8, PhD; Jessica Babineau9, MLIS; Monica Cepoiu-Martin10, PhD, MD; Michael Irvine11,12, PhD; Sarah Munce1,4,13,14, PhD; Sally Abudiab1, BSc; Marko Bjelica1,4, MSc; Saima Hossain15, BSc; Muhammad Imran16, MSc; Tara Jeji3, MD; Susan Jaglal15, PhD 1Rehabilitation Sciences Institute, Faculty of Medicine, University of Toronto, Toronto, ON, Canada 2Advanced Analytics, Canadian Institute for Health Information, Toronto, ON, Canada 3Ontario Neurotrauma Foundation, Toronto, ON, Canada 4Toronto Rehabilitation Institute, University Health Network, Toronto, ON, Canada 5Universite de Sherbrooke, Quebec, QC, Canada 6School of Public Health and Health Systems, University of Waterloo, Waterloo, ON, Canada 7Department of Health Research Methods, Evidence and Impact, McMaster University, Hamilton, ON, Canada 8Centre for Health Economics and Policy Analysis, McMaster University, Hamilton, ON, Canada 9Library & Information Services, University Health Network, Toronto, ON, Canada 10Data Intelligence for Health Lab, Cumming School of Medicine, University of Calgary, Calgary, AB, Canada 11Department of Mathematics, University of British Columbia, Vancouver, BC, Canada 12British Columbia Centre for Disease Control, Vancouver, BC, Canada 13Department of Occupational Science and Occupational -

The Fourth Paradigm
ABOUT THE FOURTH PARADIGM This book presents the first broad look at the rapidly emerging field of data- THE FOUR intensive science, with the goal of influencing the worldwide scientific and com- puting research communities and inspiring the next generation of scientists. Increasingly, scientific breakthroughs will be powered by advanced computing capabilities that help researchers manipulate and explore massive datasets. The speed at which any given scientific discipline advances will depend on how well its researchers collaborate with one another, and with technologists, in areas of eScience such as databases, workflow management, visualization, and cloud- computing technologies. This collection of essays expands on the vision of pio- T neering computer scientist Jim Gray for a new, fourth paradigm of discovery based H PARADIGM on data-intensive science and offers insights into how it can be fully realized. “The impact of Jim Gray’s thinking is continuing to get people to think in a new way about how data and software are redefining what it means to do science.” —Bill GaTES “I often tell people working in eScience that they aren’t in this field because they are visionaries or super-intelligent—it’s because they care about science The and they are alive now. It is about technology changing the world, and science taking advantage of it, to do more and do better.” —RhyS FRANCIS, AUSTRALIAN eRESEARCH INFRASTRUCTURE COUNCIL F OURTH “One of the greatest challenges for 21st-century science is how we respond to this new era of data-intensive -

A Visual Technique to Analyze Flow of Information in a Machine Learning System
A Visual Technique to Analyze Flow of Information in a Machine Learning System Abon Chaudhuri, Walmart Labs, Sunnyvale, CA, USA Abstract dition to statistical analysis, the use of visual analytics to answer Machine learning (ML) algorithms and machine learning these questions effectively is becoming increasingly popular. based software systems implicitly or explicitly involve complex Going one step deeper, we observe that the flow of infor- flow of information between various entities such as training data, mation across various entities can often be formulated as joint or feature space, validation set and results. Understanding the sta- conditional probability distributions. A few examples are: dis- tistical distribution of such information and how they flow from tribution of class labels in the training data, conditional distribu- one entity to another influence the operation and correctness of tion feature values given a label, comparison between distribution such systems, especially in large-scale applications that perform of classes in test and training data. Statistical measures such as classification or prediction in real time. In this paper, we pro- mean and variance have well-known limitations in understand- pose a visual approach to understand and analyze flow of infor- ing distributions. On the other hand, visualization based tech- mation during model training and serving phases. We build the niques allow a human expert to analyze information at different visualizations using a technique called Sankey Diagram - con- levels of granularity. To give a simple example, a histogram can ventionally used to understand data flow among sets - to address be used to examine different sub-ranges of a probability distribu- various use cases of in a machine learning system. -

Go with the Flow: Sankey Diagrams Illustrate Energy Economy
Narrative: In this EcoWest presentation, we break down energy trends in the U.S. and Western states by using a graphic known as a Sankey diagram. Energy flows through everything so it’s only fitting to use this type of flow chart to depict our complex energy economy. 1 Narrative: Sankey diagrams are named after an Irish military officer who used the graphic in 1898 in a publication on steam engines. Since then, Sankey’s diagrams have won a dedicated following among data visualization nerds. The graphics summarize flows through a system by varying the width of lines according to the magnitude of energy, water, or some other commodity. Source: Wikipedia.org URL: http://en.wikipedia.org/wiki/Matthew_Henry_Phineas_Riall_Sankey 2 Narrative: One of the earliest and most famous examples of the form illustrates Napoleon’s disastrous Russian campaign in the early 19th century. Source: Napoleon's retreat from Moscow, by Adolph Northen (1828–1876) URL: http://en.wikipedia.org/wiki/File:Napoleons_retreat_from_moscow.jp g 3 Narrative: Created by Charles Joseph Minard, a French civil engineer, the graphic depicts the army’s movement across Europe and shows how their ranks were reduced from 422,000 troops in June 1812, when they invaded Russia, to just 10,000, when the remnants of the force staggered back into Poland after retreating through a brutal winter. Data visualization guru Edward Tufte says it’s “probably the best statistical graphic ever drawn.” Source: Wikipedia.org URL: http://en.wikipedia.org/wiki/Charles_Joseph_Minard 4 Narrative: Sankey diagrams created by the Lawrence Livermore National Laboratory depict both the source and use of energy. -

Identifying Students' Progress and Mobility Patterns in Higher
ORAN, MARTIN, KLYMKOWSKY, STUBBS 1 Identifying Students’ Progress and Mobility Patterns in Higher Education Through Open-Source Visualization Ali Oran, Andrew Martin, Michael Klymkowsky, and Robert Stubbs Abstract For ensuring students’ continuous achievement of academic excellence, higher education institutions commonly engage in periodic and critical revision of its academic programs. Depending on the goals and the resources of the institution, these revisions can focus only on an analysis of retention-graduation rates of different entry cohorts over the years, or survey results measuring students level of satisfaction in their programs. They can also be more comprehensive requiring an analysis of the content, scope, and alignment of a program’s curricula, for improving academic excellence. The revisions require the academic units to collaborate with university’s data experts, commonly the Institutional Research Office, to gather the needed information. The information for departments’ faculty and decision makers should be presentable in a highly-informative yet easily-interpretable manner, so that the review committee can quickly notice areas of improvement and take actions afterwards. In this study, we discuss the development and practical use of a visual that was developed with these key points in mind. The visuals, referred by us as “Students’ Progress Visuals”, are based on the Sankey diagram and provide information on students’ progress and mobility patterns in an academic unit over time in an easily understandable format. They were developed using open source software, and recently began to be used by several departments of our research intensive higher-ed institution for academic units’ review processes, which includes members of the campus community and external area experts. -
Minard's Chart of Napolean's Campaign
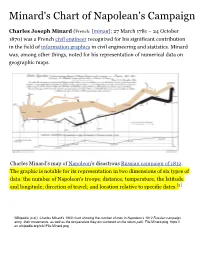
Minard's Chart of Napolean's Campaign Charles Joseph Minard (French: [minaʁ]; 27 March 1781 – 24 October 1870) was a French civil engineer recognized for his significant contribution in the field of information graphics in civil engineering and statistics. Minard was, among other things, noted for his representation of numerical data on geographic maps. Charles Minard's map of Napoleon's disastrous Russian campaign of 1812. The graphic is notable for its representation in two dimensions of six types of data: the number of Napoleon's troops; distance; temperature; the latitude and longitude; direction of travel; and location relative to specific dates.[2] Wikipedia (n.d.). Charles Minard's 1869 chart showing the number of men in Napoleon’s 1812 Russian campaign army, their movements, as well as the temperature they encountered on the return path. File:Minard.png. https:// en.wikipedia.org/wiki/File:Minard.png The original description in French accompanying the map translated to English:[3] Drawn by Mr. Minard, Inspector General of Bridges and Roads in retirement. Paris, 20 November 1869. The numbers of men present are represented by the widths of the colored zones in a rate of one millimeter for ten thousand men; these are also written beside the zones. Red designates men moving into Russia, black those on retreat. — The informations used for drawing the map were taken from the works of Messrs. Thiers, de Ségur, de Fezensac, de Chambray and the unpublished diary of Jacob, pharmacist of the Army since 28 October. Recognition Modern information -

Application of Various Open Source Visualization Tools for Effective Mining of Information from Geospatial Petroleum Data
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLII-5, 2018 ISPRS TC V Mid-term Symposium “Geospatial Technology – Pixel to People”, 20–23 November 2018, Dehradun, India APPLICATION OF VARIOUS OPEN SOURCE VISUALIZATION TOOLS FOR EFFECTIVE MINING OF INFORMATION FROM GEOSPATIAL PETROLEUM DATA N. D. Gholba 1, Arun Babu 1 *, S. Shanmugapriya 1, Abhishek Singh 1, Ashutosh Srivastava 2, Sameer Saran 2 1 M. Tech Students, Indian Institute of Remote Sensing, Dehradun, Uttrakhand, India – (guava.iirs, arunlekshmi1994, priya.iirs2017, abhisheksingh2441)@gmail.com 2 Geoinformatics Department, Indian Institute of Remote Sensing, Dehradun, Uttrakhand, India – (asrivastava, sameer)@iirs.gov.in Commission V, WG V/8 KEYWORDS: Open Source Geodata Visualization, Data Mining, Global Petroleum Statistics, QGIS, R, Sankey Maps ABSTRACT: This study emphasizes the use of various tools for visualizing geospatial data for facilitating information mining of the global petroleum reserves. In this paper, open-source data on global oil trade, from 1996 to 2016, published by British Petroleum was used. It was analysed using the shapefile of the countries of the world in the open-source software like StatPlanet, R and QGIS. Visualizations were created using different maps with combinations of graphics and plots, like choropleth, dot density, graduated symbols, 3D maps, Sankey diagrams, hybrid maps, animations, etc. to depict the global petroleum trade. Certain inferences could be quickly made like, Venezuela and Iran are rapidly rising as the producers of crude oil. The strong-hold is shifting from the Gulf countries since China, Sudan and Kazakhstan have shown a high rate of positive growth in crude reserves. -

Time and Animation
TIME AND ANIMATION Petra Isenberg (&Pierre Dragicevic) TIME VISUALIZATION ANIMATION 2 TIME VISUALIZATION ANIMATION Time 3 VISUALIZATION OF TIME 4 TIME Is just another data dimension Why bother? 5 TIME Is just another data dimension Why bother? What data type is it? • Nominal? • Ordinal? • Quantitative? 6 TIME Ordinal Quantitative • Discrete • Continuous Aigner et al, 2011 7 TIME Joe Parry, 2007. Adapted from Mackinlay, 1986 8 TIME Periodicity • Natural: days, seasons • Social: working hours, holidays • Biological: circadian, etc. Has many subdivisions (units) • Years, months, days, weeks, H, M, S Has a specific meaning • Not captured by data type • Associations, conventions • Pervasive in the real-world • Time visualizations often considered as a separate type 9 TIME Shneiderman: • 1-dimensional data • 2-dimensional data • 3-dimensional data • temporal data • multi-dimensional data • tree data • network data 10 VISUALIZING TIME as a time point 11 VISUALIZING TIME as a time period 12 VISUALIZING TIME as a duration 13 VISUALIZING TIME PLUS DATA 14 MAPPING TIME TO SPACE 15 MAPPING TIME TO AN AXIS Time Data 16 TIME-SERIES DATA From a Statistics Book: • A set of observations xt, each one being recorded at a specific time t From Wikipedia: • A sequence of data points, measured typically at successive time instants spaced at uniform time intervals 17 LINE CHARTS Aigner et al, 2011 18 LINE CHARTS Marey’s Physiological Recordings Plethysmograph Étienne-Jules Marey, 1876 (image source) Pneumogram Étienne-Jules Marey, 1876 (image source) 19 LINE CHARTS Pendulum Seismometer (image source) Andrea Bina, 1751 Possibly also 17th century (source) 20 LINE CHARTS Inclinations of planetary orbits Macrobius, 10th or 11th century cited in Kendall, 1990 21 Marey’s Train Schedule LINE CHARTS 6 PARIS LYON 7 22 Étienne-Jules Marey, 1885, cited in Tufte, 1983 OTHER CHARTS Line Plots Point Plots Silhouette Graphs Bar Charts Aigner et al, 2011 23 OTHER CHARTS Combination - New York Times Weather Chart New York Times, 1980. -

The Diversity of Data and Tasks in Event Analytics
The Diversity of Data and Tasks in Event Analytics Catherine Plaisant, Ben Shneiderman Abstract— The growing interest in event analytics has resulted in an array of tools and applications using visual analytics techniques. As we start to compare and contrast approaches, tools and applications it will be essential to develop a common language to describe the data characteristics and diverse tasks. We propose a characterisation of event data along 3 dimensions (temporal characteristics, attributes and scale) and propose 8 high-level user tasks. We look forward to refining the lists based on the feedback of workshop attendees. KEYWORDS having the same time stamp, medical data are often Temporal analysis, pattern analysis, task analysis, taxonomy, big recorded in batches after the fact. data, temporal visualization o The relevant time scale may vary (from milliseconds to years), and may be homogeneous or not. INTRODUCTION o Data may represent changes over time of a status The growing interest in event analytics (e.g. Aigner et al, 2011; indicator, e.g. changes of cancer stages, student status or Shneiderman and Plaisant, 2016) has resulted in an array of novel physical presence in various hospital services, or may tools and applications using visual analytics techniques. As represent a set of events or actions that are not exclusive researchers compare and contrast approaches it will be helpful to from one another, e.g. actions in a computer log or series develop a common language to describe the diverse tasks and data of symptoms and medical tests. characteristics analysts encounter. o Patterns may be very cyclical or not, and this may vary The methodology of design studies - which primarily focus on over time. -
Defining Visual Rhetorics §
DEFINING VISUAL RHETORICS § DEFINING VISUAL RHETORICS § Edited by Charles A. Hill Marguerite Helmers University of Wisconsin Oshkosh LAWRENCE ERLBAUM ASSOCIATES, PUBLISHERS 2004 Mahwah, New Jersey London This edition published in the Taylor & Francis e-Library, 2008. “To purchase your own copy of this or any of Taylor & Francis or Routledge’s collection of thousands of eBooks please go to www.eBookstore.tandf.co.uk.” Copyright © 2004 by Lawrence Erlbaum Associates, Inc. All rights reserved. No part of this book may be reproduced in any form, by photostat, microform, retrieval system, or any other means, without prior written permission of the publisher. Lawrence Erlbaum Associates, Inc., Publishers 10 Industrial Avenue Mahwah, New Jersey 07430 Cover photograph by Richard LeFande; design by Anna Hill Library of Congress Cataloging-in-Publication Data Definingvisual rhetorics / edited by Charles A. Hill, Marguerite Helmers. p. cm. Includes bibliographical references and index. ISBN 0-8058-4402-3 (cloth : alk. paper) ISBN 0-8058-4403-1 (pbk. : alk. paper) 1. Visual communication. 2. Rhetoric. I. Hill, Charles A. II. Helmers, Marguerite H., 1961– . P93.5.D44 2003 302.23—dc21 2003049448 CIP ISBN 1-4106-0997-9 Master e-book ISBN To Anna, who inspires me every day. —C. A. H. To Emily and Caitlin, whose artistic perspective inspires and instructs. —M. H. H. Contents Preface ix Introduction 1 Marguerite Helmers and Charles A. Hill 1 The Psychology of Rhetorical Images 25 Charles A. Hill 2 The Rhetoric of Visual Arguments 41 J. Anthony Blair 3 Framing the Fine Arts Through Rhetoric 63 Marguerite Helmers 4 Visual Rhetoric in Pens of Steel and Inks of Silk: 87 Challenging the Great Visual/Verbal Divide Maureen Daly Goggin 5 Defining Film Rhetoric: The Case of Hitchcock’s Vertigo 111 David Blakesley 6 Political Candidates’ Convention Films:Finding the Perfect 135 Image—An Overview of Political Image Making J. -

The Forgotten Discovery of Gravity Models and the Inefficiency of Early
The forgotten discovery of gravity models and the inefficiency of early railway networks Andrew Odlyzko School of Mathematics University of Minnesota Minneapolis, MN 55455, USA [email protected] http://www.dtc.umn.edu/∼odlyzko Revised version, April 19, 2015 Abstract. The routes of early railways around the world were generally inef- ficient because of the incorrect assumption that long distance travel between major cities would dominate. Modern planners rely on methods such as the “gravity models of spatial interaction,” which show quantitatively the impor- tance of accommodating travel demands between smaller cities. Such models were not used in the 19th century. This paper shows that gravity models were discovered in 1846, a dozen years earlier than had been known previously. That discovery was published during the great Railway Mania in Britain. Had the validity and value of gravity models been recognized properly, the investment losses of that gigantic bubble could have been lessened, and more efficient rail systems in Britain and many other countries would have been built. This incident shows society’s early encounter with the “Big Data” of the day and the slow diffusion of economically significant information. The results of this study suggest that it will be increasingly feasible to use modern network science to analyze information dissemination in the 19th century. That might assist in understanding the diffusion of technologies and the origins of bubbles. Keywords: gravity models, railway planning, diffusion of information JEL classification codes: D8, L9, N7 1 Introduction Dramatic innovations in transportation or communication frequently produce predictions that distance is becoming irrelevant. In recent decades, two popular books in this genre introduced the concepts of “death of distance” [7] and “the Earth is flat” [25]. -

Visions and Re-Visions of Charles Joseph Minard
Visions and Re-Visions of Charles Joseph Minard Michael Friendly Psychology Department and Statistical Consulting Service York University 4700 Keele Street, Toronto, ON, Canada M3J 1P3 in: Journal of Educational and Behavioral Statistics. See also BIBTEX entry below. BIBTEX: @Article{ Friendly:02:Minard, author = {Michael Friendly}, title = {Visions and {Re-Visions} of {Charles Joseph Minard}}, year = {2002}, journal = {Journal of Educational and Behavioral Statistics}, volume = {27}, number = {1}, pages = {31--51}, } © copyright by the author(s) document created on: February 19, 2007 created from file: jebs.tex cover page automatically created with CoverPage.sty (available at your favourite CTAN mirror) JEBS, 2002, 27(1), 31–51 Visions and Re-Visions of Charles Joseph Minard∗ Michael Friendly York University Abstract Charles Joseph Minard is most widely known for a single work, his poignant flow-map depiction of the fate of Napoleon’s Grand Army in the disasterous 1812 Russian campaign. In fact, Minard was a true pioneer in thematic cartography and in statistical graphics; he developed many novel graphics forms to depict data, always with the goal to let the data “speak to the eyes.” This paper reviews Minard’s contributions to statistical graphics, the time course of his work, and some background behind the famous March on Moscow graphic. We also look at some modern re-visions of this graph from an information visualization perspecitive, and examine some lessons this graphic provides as a test case for the power and expressiveness of computer systems or languages for graphic information display and visual- ization. Key words: Statistical graphics; Data visualization, history; Napoleonic wars; Thematic car- tography; Dynamic graphics; Mathematica 1 Introduction RE-VISION n.