The 3D Fluid Simulations of the Solar Wind Interaction with Mars
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Magnetic Nozzle Plasma Plume: Review of Crucial Physical Phenomena
48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit AIAA 2012-4274 30 July - 01 August 2012, Atlanta, Georgia Magnetic Nozzle Plasma Plume: Review of Crucial Physical Phenomena Frans H. Ebersohn∗, Sharath S. Girimaji y, and David Staack z Texas A & M University, College Station, Texas 77843, USA John V. Shebalinx Astromaterials Research & Exploration Science Office, NASA Johnson Space Center, Houston, Texas 77058 Benjamin Longmier{ University of Michigan, Ann Arbor, Michigan, 48109, USA Chris Olsenk Ad Astra Rocket Company, Webster, Texas 77598 This paper presents a review of the current understanding of magnetic nozzle physics. The crucial steps necessary for thrust generation in magnetic nozzles are energy conver- sion, plasma detachment, and momentum transfer. The currently considered mechanisms by which to extract kinetic energy from the plasma include the conservation of the mag- netic moment adiabatic invariant, electric field forces, thermal energy directionalization, and Joule heating. Plasma detachment mechanisms discussed include resistive diffusion, recombination, magnetic reconnection, loss of adiabaticity, inertial forces, and self-field detachment. Momentum transfer from the plasma to the spacecraft occurs due to the interaction between the applied field currents and induced currents which are formed due to the magnetic pressure. These three physical phenomena are crucial to thrust generation and must be understood to optimize magnetic nozzle design. The operating dimension- less parameter ranges of six prominent experiments -

Transport of Dangerous Goods
ST/SG/AC.10/1/Rev.16 (Vol.I) Recommendations on the TRANSPORT OF DANGEROUS GOODS Model Regulations Volume I Sixteenth revised edition UNITED NATIONS New York and Geneva, 2009 NOTE The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariat of the United Nations concerning the legal status of any country, territory, city or area, or of its authorities, or concerning the delimitation of its frontiers or boundaries. ST/SG/AC.10/1/Rev.16 (Vol.I) Copyright © United Nations, 2009 All rights reserved. No part of this publication may, for sales purposes, be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, electrostatic, magnetic tape, mechanical, photocopying or otherwise, without prior permission in writing from the United Nations. UNITED NATIONS Sales No. E.09.VIII.2 ISBN 978-92-1-139136-7 (complete set of two volumes) ISSN 1014-5753 Volumes I and II not to be sold separately FOREWORD The Recommendations on the Transport of Dangerous Goods are addressed to governments and to the international organizations concerned with safety in the transport of dangerous goods. The first version, prepared by the United Nations Economic and Social Council's Committee of Experts on the Transport of Dangerous Goods, was published in 1956 (ST/ECA/43-E/CN.2/170). In response to developments in technology and the changing needs of users, they have been regularly amended and updated at succeeding sessions of the Committee of Experts pursuant to Resolution 645 G (XXIII) of 26 April 1957 of the Economic and Social Council and subsequent resolutions. -

Propulsion Options for the Global Precipitation Measurement Core Satellite
PROPULSION OPTIONS FOR THE GLOBAL PRECIPITATION MEASUREMENT CORE SATELLITE Eric H. Cardiff*, Gary T. Davist, and David C. FoltaS NASA Goddard Space Flight Center Greenbelt, MD 2077 1 Abstract This study was conducted to evaluate several propulsion system options for the Global Precipitation Measurement (GPM) core satellite. Orbital simulations showed clear benefits for the scientific data to be obtained at a constant orbital altitude rather than with a decayheboost approach. An orbital analysis estimated the drag force on the satellite will be 1 to 12 mN during the five-year mission. Four electric propulsion systems were identified that are able to compensate for these drag forces and maintain a circular orbit. The four systems were the UK-lO/TS and the NASA 8 cm ion engines, and the ESA RMT and RITlO EVO radio-frequency ion engines. The mass, cost, and power requirements were examined for these four systems. The systems were also evaluated for the transfer time from the initial orbit of 400 x 650 km altitude orbit to a circular 400 km orbit. The transfer times were excessive, and as a consequence a “dual” system concept (with a hydrazine monopropellant system for the orbit transfer and electric propulsion for drag compensation) was examined. Clear mass benefits were obtained with the “dual” system, but cost remains an issue because of the larger power system required for the electric propulsion system. An electrodynamic tether was also evaluated in this trade study. Introduction The propulsion system is required to perform two The Global Precipitation Measurement (GPM) primary functions. The first is to transfer the mission will be launched in late 2008 to measure satellite from the launch insertion orbit to the final the amount and type of precipitation around the circular orbit. -

1 the Merits of Cold Gas Micropropulsion in State-Of
IAC-02-S.2.07 THE MERITS OF COLD GAS MICROPROPULSION IN STATE-OF-THE-ART SPACE MISSIONS Hugo Nguyen, Johan Köhler and Lars Stenmark The Ångström Space Technology Centre, Uppsala University, Box 534, SE-751 21 Uppsala, Sweden. [email protected] Fax: +46 18 471 3572 Abstract: Cold gas micropropulsion is a sound 1. INTRODUCTION choice for space missions that require extreme For Attitude and Orbit Control System (AOCS) stabilisation, pointing precision or contamination- requirements on extreme stabilisation, pointing free operation. The use of forces in the micronewton precision, contamination-free operation is the range for spacecraft operations has been identified as most important for many missions. Examples a mission-critical item in several demanding space include DARWIN, LISA, SIM, NGST, and those systems currently under development. which have optical or other equipments pointing Cold gas micropropulsion systems share merits with exactly to a certain object or in a certain direction. traditional cold gas systems in being simple in Other obviously desirable properties include design, clean, safe, and robust. They do not generate design simplicity, cleanliness, safety, robustness, net charge to the spacecraft, and typically operate on low-power operation, no net charge generation to low-power. The minute size is suitable not only for the craft, together with low mass, and a wide inclusion on high-performance nanosatellites but dynamic range. Cold gas micropropulsion has also for high-demanding future space missions of those merits and in the present paper, larger sizes. technological solutions will be treated By using differently sized nozzles in parallel emphatically, at the same time the mentioned systems the dynamic range of a cold gas merits will be brought out clearly. -

Breakthrough Propulsion Study Assessing Interstellar Flight Challenges and Prospects
Breakthrough Propulsion Study Assessing Interstellar Flight Challenges and Prospects NASA Grant No. NNX17AE81G First Year Report Prepared by: Marc G. Millis, Jeff Greason, Rhonda Stevenson Tau Zero Foundation Business Office: 1053 East Third Avenue Broomfield, CO 80020 Prepared for: NASA Headquarters, Space Technology Mission Directorate (STMD) and NASA Innovative Advanced Concepts (NIAC) Washington, DC 20546 June 2018 Millis 2018 Grant NNX17AE81G_for_CR.docx pg 1 of 69 ABSTRACT Progress toward developing an evaluation process for interstellar propulsion and power options is described. The goal is to contrast the challenges, mission choices, and emerging prospects for propulsion and power, to identify which prospects might be more advantageous and under what circumstances, and to identify which technology details might have greater impacts. Unlike prior studies, the infrastructure expenses and prospects for breakthrough advances are included. This first year's focus is on determining the key questions to enable the analysis. Accordingly, a work breakdown structure to organize the information and associated list of variables is offered. A flow diagram of the basic analysis is presented, as well as more detailed methods to convert the performance measures of disparate propulsion methods into common measures of energy, mass, time, and power. Other methods for equitable comparisons include evaluating the prospects under the same assumptions of payload, mission trajectory, and available energy. Missions are divided into three eras of readiness (precursors, era of infrastructure, and era of breakthroughs) as a first step before proceeding to include comparisons of technology advancement rates. Final evaluation "figures of merit" are offered. Preliminary lists of mission architectures and propulsion prospects are provided. -

An Assessment of Aerocapture and Applications to Future Missions
Post-Exit Atmospheric Flight Cruise Approach An Assessment of Aerocapture and Applications to Future Missions February 13, 2016 National Aeronautics and Space Administration An Assessment of Aerocapture Jet Propulsion Laboratory California Institute of Technology Pasadena, California and Applications to Future Missions Jet Propulsion Laboratory, California Institute of Technology for Planetary Science Division Science Mission Directorate NASA Work Performed under the Planetary Science Program Support Task ©2016. All rights reserved. D-97058 February 13, 2016 Authors Thomas R. Spilker, Independent Consultant Mark Hofstadter Chester S. Borden, JPL/Caltech Jessie M. Kawata Mark Adler, JPL/Caltech Damon Landau Michelle M. Munk, LaRC Daniel T. Lyons Richard W. Powell, LaRC Kim R. Reh Robert D. Braun, GIT Randii R. Wessen Patricia M. Beauchamp, JPL/Caltech NASA Ames Research Center James A. Cutts, JPL/Caltech Parul Agrawal Paul F. Wercinski, ARC Helen H. Hwang and the A-Team Paul F. Wercinski NASA Langley Research Center F. McNeil Cheatwood A-Team Study Participants Jeffrey A. Herath Jet Propulsion Laboratory, Caltech Michelle M. Munk Mark Adler Richard W. Powell Nitin Arora Johnson Space Center Patricia M. Beauchamp Ronald R. Sostaric Chester S. Borden Independent Consultant James A. Cutts Thomas R. Spilker Gregory L. Davis Georgia Institute of Technology John O. Elliott Prof. Robert D. Braun – External Reviewer Jefferey L. Hall Engineering and Science Directorate JPL D-97058 Foreword Aerocapture has been proposed for several missions over the last couple of decades, and the technologies have matured over time. This study was initiated because the NASA Planetary Science Division (PSD) had not revisited Aerocapture technologies for about a decade and with the upcoming study to send a mission to Uranus/Neptune initiated by the PSD we needed to determine the status of the technologies and assess their readiness for such a mission. -
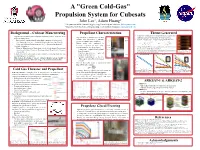
A "Green Cold-Gas" Propulsion System for Cubesats
A "Green Cold-Gas" Propulsion System for Cubesats John Lee1, Adam Huang2 1 Department of Mechanical Engineering, University of Arkansas, [email protected] 2 Department of Mechanical Engineering, University of Arkansas, [email protected] Background – Cubesat Maneuvering Propellant Characterization Thrust Generated • Current Cubesat maneuvering techniques are mainly passive, with little to no • Vaporizing a propellant via nanochannels to vacuum was • Experiments were conducted in a vacuum HD Lifecam ability to change orbits. studied as a means of propulsion for small satellites. chamber that maintained a milliTorr • Specific impulse (Isp) - measure of propellant efficiency • Basic attitude control primarily using Earth’s magnetic field or gravity. Black Out Bell Jar Curtain pressure to simulate space conditions 훾+1 훾푅푇 ∗ ∗ • Very low torque, long time-constant stability (hours), and low accuracy. 푐 훾 2 2 훾−1 푐 = 훾+1 • Various trials were conducted to 퐼푠푝 = where 2 2훾−1 푔 훾 − 1 훾 + 1 훾 • Near-term flights with momentum wheels. Need momentum dumping. 0 훾 + 1 determine properties of vapor phase Light Source • Available technologies aqueous propylene glycol by varying: Test Apparatus • Using Aqueous PG Isp and nanochannel array dimensions • Magnets, Magnetorquers, Momentum wheels (needs dump), Conventional 250μm • Temperature – controlled with a bang- Mass Scale the theoretical thrust was calculated thrusters (solid, fluid thrusters), Gravity gradient, Drag, Electric Thrusters bang thermostat • Thrust is tuned by adjusted the nanochannel dimensions -

Gravity-Assist Trajectories to Jupiter Using Nuclear Electric Propulsion
AAS 05-398 Gravity-Assist Trajectories to Jupiter Using Nuclear Electric Propulsion ∗ ϒ Daniel W. Parcher ∗∗ and Jon A. Sims ϒϒ This paper examines optimal low-thrust gravity-assist trajectories to Jupiter using nuclear electric propulsion. Three different Venus-Earth Gravity Assist (VEGA) types are presented and compared to other gravity-assist trajectories using combinations of Earth, Venus, and Mars. Families of solutions for a given gravity-assist combination are differentiated by the approximate transfer resonance or number of heliocentric revolutions between flybys and by the flyby types. Trajectories that minimize initial injection energy by using low resonance transfers or additional heliocentric revolutions on the first leg of the trajectory offer the most delivered mass given sufficient flight time. Trajectory families that use only Earth gravity assists offer the most delivered mass at most flight times examined, and are available frequently with little variation in performance. However, at least one of the VEGA trajectory types is among the top performers at all of the flight times considered. INTRODUCTION The use of planetary gravity assists is a proven technique to improve the performance of interplanetary trajectories as exemplified by the Voyager, Galileo, and Cassini missions. Another proven technique for enhancing the performance of space missions is the use of highly efficient electric propulsion systems. Electric propulsion can be used to increase the mass delivered to the destination and/or reduce the trip time over typical chemical propulsion systems.1,2 This technology has been demonstrated on the Deep Space 1 mission 3 − part of NASA’s New Millennium Program to validate technologies which can lower the cost and risk and enhance the performance of future missions. -

Magnetic Nozzle Simulation Studies for Electric Propulsion
Aneutronic Fusion Spacecraft Architecture 1 2 3 A. G. Tarditi , G. H. Miley and J. H. Scott 1University of Houston – Clear Lake, Houston, TX 2University of Illinois-Urbana-Champaign, Urbana, IL 3NASA Johnson Space Center, Houston, TX NIAC 2012 – Spring Meeting, Pasadena, CA Aneutronic Fusion Spacecraft Architecture 1 2 3 A. G. Tarditi , G. H. Miley and J. H. Scott 1University of Houston – Clear Lake, Houston, TX 2University of Illinois-Urbana-Champaign, Urbana, IL 3NASA Johnson Space Center, Houston, TX NIAC 2012 – Spring Meeting, Pasadena, CA Summary • Exploration of a new concept for space propulsion suitable for aneutronic fusion • Fusion energy-to-thrust direct conversion: turn fusion products kinetic energy into thrust • Fusion products beam conditioning: specific impulse and thrust compatible with needs practical mission Where all this fits: the Big Picture • “Big time” space travel needs advanced propulsion at the 100-MW level • This really means electric propulsion • Electric propulsion needs fusion Electric Space Propulsion Plasma Advanced Electric Fusion Research Propulsion Utility Technology Fusion Propulsion Introduction - Space Exploration Needs ? ? “Game changers” in the evolution of human transportation Introduction - Space Exploration Needs • Incremental modifications of existing space transportation ? designs can only go so far… • Aerospace needs new propulsion technologies Introduction - Priorities • A new propulsion paradigm that enables faster and longer distance space travel is arguably the technology development that could have the largest impact on the overall scope of the NASA mission • In comparison, every other space technology development would probably look merely incremental • Investing in R&D on new, advanced space propulsion architectures could have the largest impact on the overall scope of the NASA mission. -

Magnetoshell Aerocapture: Advances Toward Concept Feasibility
Magnetoshell Aerocapture: Advances Toward Concept Feasibility Charles L. Kelly A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Aeronautics & Astronautics University of Washington 2018 Committee: Uri Shumlak, Chair Justin Little Program Authorized to Offer Degree: Aeronautics & Astronautics c Copyright 2018 Charles L. Kelly University of Washington Abstract Magnetoshell Aerocapture: Advances Toward Concept Feasibility Charles L. Kelly Chair of the Supervisory Committee: Professor Uri Shumlak Aeronautics & Astronautics Magnetoshell Aerocapture (MAC) is a novel technology that proposes to use drag on a dipole plasma in planetary atmospheres as an orbit insertion technique. It aims to augment the benefits of traditional aerocapture by trapping particles over a much larger area than physical structures can reach. This enables aerocapture at higher altitudes, greatly reducing the heat load and dynamic pressure on spacecraft surfaces. The technology is in its early stages of development, and has yet to demonstrate feasibility in an orbit-representative envi- ronment. The lack of a proof-of-concept stems mainly from the unavailability of large-scale, high-velocity test facilities that can accurately simulate the aerocapture environment. In this thesis, several avenues are identified that can bring MAC closer to a successful demonstration of concept feasibility. A custom orbit code that dynamically couples magnetoshell physics with trajectory prop- agation is developed and benchmarked. The code is used to simulate MAC maneuvers for a 60 ton payload at Mars and a 1 ton payload at Neptune, both proposed NASA mis- sions that are not possible with modern flight-ready technology. In both simulations, MAC successfully completes the maneuver and is shown to produce low dynamic pressures and continuously-variable drag characteristics. -

6. Chemical-Nuclear Propulsion MAE 342 2016
2/12/20 Chemical/Nuclear Propulsion Space System Design, MAE 342, Princeton University Robert Stengel • Thermal rockets • Performance parameters • Propellants and propellant storage Copyright 2016 by Robert Stengel. All rights reserved. For educational use only. http://www.princeton.edu/~stengel/MAE342.html 1 1 Chemical (Thermal) Rockets • Liquid/Gas Propellant –Monopropellant • Cold gas • Catalytic decomposition –Bipropellant • Separate oxidizer and fuel • Hypergolic (spontaneous) • Solid Propellant ignition –Mixed oxidizer and fuel • External ignition –External ignition • Storage –Burn to completion – Ambient temperature and pressure • Hybrid Propellant – Cryogenic –Liquid oxidizer, solid fuel – Pressurized tank –Throttlable –Throttlable –Start/stop cycling –Start/stop cycling 2 2 1 2/12/20 Cold Gas Thruster (used with inert gas) Moog Divert/Attitude Thruster and Valve 3 3 Monopropellant Hydrazine Thruster Aerojet Rocketdyne • Catalytic decomposition produces thrust • Reliable • Low performance • Toxic 4 4 2 2/12/20 Bi-Propellant Rocket Motor Thrust / Motor Weight ~ 70:1 5 5 Hypergolic, Storable Liquid- Propellant Thruster Titan 2 • Spontaneous combustion • Reliable • Corrosive, toxic 6 6 3 2/12/20 Pressure-Fed and Turbopump Engine Cycles Pressure-Fed Gas-Generator Rocket Rocket Cycle Cycle, with Nozzle Cooling 7 7 Staged Combustion Engine Cycles Staged Combustion Full-Flow Staged Rocket Cycle Combustion Rocket Cycle 8 8 4 2/12/20 German V-2 Rocket Motor, Fuel Injectors, and Turbopump 9 9 Combustion Chamber Injectors 10 10 5 2/12/20 -

Hall2de Simulations of a Magnetic Nozzle
AIAA Propulsion and Energy Forum 10.2514/6.2020-3642 August 24-28, 2020, VIRTUAL EVENT AIAA Propulsion and Energy 2020 Forum Hall2De Simulations of a Magnetic Nozzle Thomas A. Marks∗ University of Michigan, Ann Arbor, MI, 48109 Alejandro Lopez-Ortega † and Ioannis G. Mikellides ‡ Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109 Benjamin A. Jorns§ University of Michigan, Ann Arbor, MI, 48109 The two-dimensional, fluid-based Hall thruster code Hall2De is adapted to simulate a low temperature propulsive magnetic nozzle. Electron cyclotron resonance (ECR) thrusters developed at the Office National d’Etudes et de Recherches Aérospatiales (ONERA) in France and the University of Michigan are investigated. For each device, the simulated domain is defined from the nozzle throat to a location 10 thruster radii downstream. A numerical mesh is defined based on the measured magnetic field, and the governing fluid equations for singly- charge ions, electrons, and neutrals are solved. The boundary conditions for the throat of the magnetic nozzle are based on measured values of electron temperature and ion velocity. Multiple boundary conditions for the electron temperature in the downstream regions of the domain are considered. The simulated ion velocity and potential agrees well with experiment, while the simulated current densities and therefore thrusts are 50-75% higher than experiment. When a Neumann boundary condition for electron temperature is applied to the far-plume boundaries, the nozzle was seen to be purely isothermal. This suggests that the thermal conductivity along field lines in real devices is much lower than classical simulations predict, and anomalous resistivity may be needed to reproduce the temperature distribution observed in experiment.