Arxiv:1904.01150V2 [Cs.CV] 23 Nov 2019 Strate the Advantages of Our Approach
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Zhou Ren Email: [email protected] Homepage
Zhou Ren Email: [email protected] Homepage: http://cs.ucla.edu/~zhou.ren INDUSTRY EXPERIENCE 12/2018 – present, Senior Research Lead, Wormpex AI Research, Bellevue, WA, USA 05/2018 – 12/2018, Senior Research Scientist, Snap Inc., Santa Monica, CA, USA 10/2017 – 05/2018, Research Scientist (III), Snap Inc., Venice, CA, USA 04/2017 – 10/2017, Research Scientist (II), Snap Inc., Venice, CA, USA 07/2016 – 04/2017, Research Scientist (I), Snap Inc., Venice, CA, USA 03/2016 – 06/2016, Research Intern, Snap Inc., Venice, CA, USA 06/2015 – 09/2015, Deep Learning Research Intern, Adobe Research, San Jose, CA, USA 06/2013 – 09/2013, Research Intern, Toyota Technological Institute, Chicago, IL, USA 07/2010 – 07/2012, Project Officer, Media Technology Lab, Nanyang Technological University, Singapore PROFESSIONAL SERVICES Area Chair, CVPR 2021, CVPR 2022, WACV 2022. Senior Program Committee, AAAI 2021. Associate Editor, The Visual Computer Journal (TVCJ), 2018 – present. Director of Industrial Governance Board, Asia-Pacific Signal and Information Processing Association (APSIPA). EDUCATION Doctor of Philosophy 09/2012 – 09/2016, University of California, Los Angeles (UCLA) Major: Vision and Graphics, Computer Science Department Advisor: Prof. Alan Yuille Master of Science 09/2012 – 06/2014, University of California, Los Angeles (UCLA) Major: Vision and Graphics, Computer Science Department Advisor: Prof. Alan Yuille Master of Engineering 08/2010 – 01/2012, Nanyang Technological University (NTU), Singapore Major: Information Engineering, School -

Compositional Convolutional Neural Networks: a Deep Architecture with Innate Robustness to Partial Occlusion
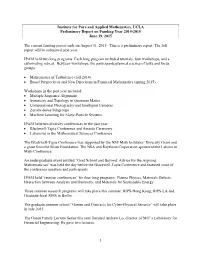
Compositional Convolutional Neural Networks: A Deep Architecture with Innate Robustness to Partial Occlusion Adam Kortylewski Ju He Qing Liu Alan Yuille Johns Hopkins University Abstract Recent findings show that deep convolutional neural net- works (DCNNs) do not generalize well under partial occlu- sion. Inspired by the success of compositional models at classifying partially occluded objects, we propose to inte- grate compositional models and DCNNs into a unified deep model with innate robustness to partial occlusion. We term this architecture Compositional Convolutional Neural Net- work. In particular, we propose to replace the fully con- nected classification head of a DCNN with a differentiable compositional model. The generative nature of the compo- sitional model enables it to localize occluders and subse- Figure 1: Partially occluded cars from the MS-COCO quently focus on the non-occluded parts of the object. We dataset [20] that are misclassified by a standard DCNN conduct classification experiments on artificially occluded but correctly classified by the proposed CompositionalNet. images as well as real images of partially occluded objects Intuitively, a CompositionalNet can localize the occluders from the MS-COCO dataset. The results show that DC- (occlusion scores on the right) and subsequently focus on NNs do not classify occluded objects robustly, even when the non-occluded parts of the object to classify the image. trained with data that is strongly augmented with partial occlusions. Our proposed model outperforms standard DC- NNs by a large margin at classifying partially occluded ob- One approach to overcome this limitation is to use data jects, even when it has not been exposed to occluded ob- augmentation in terms of partial occlusion [6, 35]. -

Brain Mapping Methods: Segmentation, Registration, and Connectivity Analysis
UCLA UCLA Electronic Theses and Dissertations Title Brain Mapping Methods: Segmentation, Registration, and Connectivity Analysis Permalink https://escholarship.org/uc/item/1jt7m230 Author Prasad, Gautam Publication Date 2013 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California University of California Los Angeles Brain Mapping Methods: Segmentation, Registration, and Connectivity Analysis A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Computer Science by Gautam Prasad 2013 c Copyright by Gautam Prasad 2013 Abstract of the Dissertation Brain Mapping Methods: Segmentation, Registration, and Connectivity Analysis by Gautam Prasad Doctor of Philosophy in Computer Science University of California, Los Angeles, 2013 Professor Demetri Terzopoulos, Chair We present a collection of methods that model and interpret information represented in structural magnetic resonance imaging (MRI) and diffusion MRI images of the living hu- man brain. Our solution to the problem of brain segmentation in structural MRI combines artificial life and deformable models to develop a customizable plan for segmentation real- ized as cooperative deformable organisms. We also present work to represent and register white matter pathways as described in diffusion MRI. Our method represents these path- ways as maximum density paths (MDPs), which compactly represent information and are compared using shape based registration for population studies. In addition, we present a group of methods focused on connectivity in the brain. These include an optimization for a global probabilistic tractography algorithm that computes fibers representing connectivity pathways in tissue, a novel maximum-flow based measure of connectivity, a classification framework identifying Alzheimer's disease based on connectivity measures, and a statisti- cal framework to find the optimal partition of the brain for connectivity analysis. -
1 Institute for Pure and Applied Mathematics, UCLA Preliminary
Institute for Pure and Applied Mathematics, UCLA Preliminary Report on Funding Year 2014-2015 June 19, 2015 The current funding period ends on August 31, 2015. This is a preliminary report. The full report will be submitted next year. IPAM held two long programs. Each long program included tutorials, four workshops, and a culminating retreat. Between workshops, the participants planned a series of talks and focus groups. Mathematics of Turbulence (fall 2014) Broad Perspectives and New Directions in Financial Mathematics (spring 2015) Workshops in the past year included: Multiple Sequence Alignment Symmetry and Topology in Quantum Matter Computational Photography and Intelligent Cameras Zariski-dense Subgroups Machine Learning for Many-Particle Systems IPAM held two diversity conferences in the past year: Blackwell-Tapia Conference and Awards Ceremony Latinos/as in the Mathematical Sciences Conference The Blackwell-Tapia Conference was supported by the NSF Math Institutes’ Diversity Grant and a grant from the Sloan Foundation. The NSA and Raytheon Corporation sponsored the Latinos in Math Conference. An undergraduate event entitled “Grad School and Beyond: Advice for the Aspiring Mathematician” was held the day before the Blackwell-Tapia Conference and featured some of the conference speakers and participants. IPAM held “reunion conferences” for four long programs: Plasma Physics, Materials Defects, Interaction between Analysis and Geometry, and Materials for Sustainable Energy Three summer research programs will take place this summer: RIPS-Hong Kong, RIPS-LA and Graduate-level RIPS in Berlin. The graduate summer school “Games and Contracts for Cyber-Physical Security” will take place in July 2015. The Green Family Lecture Series this year featured Andrew Lo, director of MIT’s Laboratory for Financial Engineering. -

Compositional Generative Networks and Robustness to Perceptible Image Changes
Compositional Generative Networks and Robustness to Perceptible Image Changes Adam Kortylewski Ju He Qing Liu Christian Cosgrove Dept. Computer Science Dept. Computer Science Dept. Computer Science Dept. Computer Science Johns Hopkins University Johns Hopkins University Johns Hopkins University Johns Hopkins University Baltimore, USA Baltimore, USA Baltimore, USA Baltimore, USA [email protected] [email protected] [email protected] [email protected] Chenglin Yang Alan L. Yuille Dept. Computer Science Dept. Computer Science Johns Hopkins University Johns Hopkins University Baltimore, USA Baltimore, USA [email protected] [email protected] Abstract—Current Computer Vision algorithms for classifying paradigm of measuring research progress in computer vision objects, such as Deep Nets, lack robustness to image changes in terms of performance improvements on well-known datasets which, although perceptible, would not fool a human observer. for large-scale image classification [8], segmentation [10], We quantify this by showing how performances of Deep Nets de- grades badly on images where the objects are partially occluded [25], pose estimation [40], and part detection [4]. and degrades even worse on more challenging and adversarial However, the focus on dataset performance encourages situations where, for example, patches are introduced in the researchers to develop computer vision models that work well images to target the weak points of the algorithm. To address this on a particular dataset, but do not transfer well to other problem we develop a novel architecture, called Compositional datasets. We argue that this lack of robustness is caused by Generative Networks (Compositional Nets) which is innately robust to these types of image changes. This architecture replaces the paradigm of evaluating computer vision algorithms on the fully connected classification head of the deep network by balanced annotated datasets (BAD). -

Jason Joseph Corso
Jason Joseph Corso Prepared on October 11, 2020 Contact University of Michigan Voxel51 1301 Beal Avenue 410 N 4th Ave 4238 EECS 3rd Floor Ann Arbor, MI 48109-2122 Ann Arbor, MI 48104-1104 Phone: 734-647-8833 Phone: 734-531-9349 Email: [email protected] Email: [email protected] Web: http://web.eecs.umich.edu/∼jjcorso Web: https://voxel51.com Background Date of Birth: 6 August 1978 Place of Birth: New York, USA Citizenship: USA Security Clearance: On Request Appointments Director of the Stevens Institute for Artificial Intelligence Hoboken, NJ Viola Ward Brinning and Elbert Calhoun Brinning Professor of Computer Science Stevens Institute of Technology 1/2021 - Ongoing Professor Ann Arbor, MI Electrical Engineering and Computer Science University of Michigan 8/2019 - 12/2020 Co-Founder and CEO Ann Arbor, MI Voxel51, Inc. 12/2016 - Present Full list of appointments begins on page 26 Research Focus Cognitive systems and their entanglement with vision, language, physical constraints, robotics, autonomy, and the semantics of the natural world, both in corner-cases and at scale. Research Areas Computer Vision Robot Perception Human Language Data Science / Machine Learning Artificial Intelligence Software Systems Education University of California, Los Angeles Los Angeles, CA Post-Doc in Neuroscience and Statistics 2006-2007 Advisors: Dr. Alan Yuille and Dr. Arthur Toga The Johns Hopkins University Baltimore, MD Ph.D. in Computer Science 6/2006 Advisor: Dr. Gregory D. Hager Dissertation Title:“Techniques for Vision-Based Human-Computer Interaction” -

Statistical Methods and Modeling in Cancer Etiology and Early Detection
Statistical Methods and Modeling in Cancer Etiology and Early Detection by Lu Li A dissertation submitted to The Johns Hopkins University in conformity with the requirements for the degree of Doctor of Philosophy Baltimore, Maryland November, 2018 © 2018 by Lu Li All rights reserved Abstract Notwithstanding the many advances made in cancer research over the last several decades, there are still many fundamental questions that need to be addressed. During my PhD, I have been working on developing statistical methods to analyze liquid biopsy data for cancer early detection and using mathematical modeling to better understand cancer etiology. Traditionally, cancer-causing mutations have been thought to have two major sources: inherited (H) and environmental (E) risk factors. However, these are not enough to explain the extreme variation in cancer incidence across different tissues. Recently, the random mutations occurring during nor- mal cell replications (R mutations) were recognized as a third and important source of cancers. In the first part of this dissertation, we proposed a novel approach to estimate the proportions of these three sources of mutations using cancer genome sequencing and epidemiological data. Our method suggests that R mutations are responsible for two-thirds of the mutations in human cancers or at least not less than 40% of them. At the same time, while the role of driver mutations and other genomic alterations in cancer causation is well recognized, they may not be sufficient for cancer to occur. Other factors like, for example, the immune system ii and the microenvironment, also have their impacts. It’s not known, as of now, how large is the contribution of mutations compared to all these other factors, which we collectively define as K factors. -

George Papandreou Web
Toyota Technological Institute at Chicago email: gpapan AT ttic.edu George Papandreou web: http://ttic.uchicago.edu/~gpapan Education 2003–2009 Ph.D. in Electrical & Computer Engineering, National Technical University of Athens, Greece. Ph.D. Thesis: Image Analysis and Computer Vision: Theory and Applications in the Restoration of Ancient Wall Paintings (Advisor: Prof. Petros Maragos) 1998–2003 Diploma/M.Eng. in Electrical & Computer Engineering, National Technical University of Athens, Greece. GPA: 9.54/10 (highest honors), ranked in top 1% of my class at the top engineering school in Greece. Diploma Thesis: Fast Algorithms for the Evolution of Geodesic Active Contours with Applications in Computer Vision (Advisor: Prof. Petros Maragos) Professional Experience 2013– Research Assistant Professor, Toyota Technological Institute at Chicago. Research in computer vision and machine learning. Main research directions: Deep learning for computer vision and speech recognition. Advancement of the theory and practice of Perturb-and-MAP probabilistic models. 2009–2013 Postdoctoral Research Scholar, University of California, Los Angeles. Member of the Center for Cognition, Vision, and Learning (CCVL), working with Prof. Alan Yuille. Re- search in computer vision and machine learning. Main projects: Developed a novel Perturb-and-MAP framework for random sampling and parameter learning in large-scale Markov random fields (NSF, AFOSR, & ONR-MURI, 2010–now). Building whole-image probabilistic models from patch-level representations to handle in a unified manner visual tasks both at low-level (denoising) and at high-level (classification, recognition) (NSF, 2011–2013). 2003–2009 Graduate Research Assistant, National Technical University of Athens, Greece. Member of the Computer Vision, Speech Communication & Signal Processing (CVSP) group (cvsp.cs.ntua.gr). -

Efficient Multilevel Brain Tumor Segmentation with Integrated
Manuscript submitted to IEEE Transactions on Medical 1 Imaging. Do not distribute. Efficient Multilevel Brain Tumor Segmentation with Integrated Bayesian Model Classification Jason J. Corso, Member, IEEE, Eitan Sharon, Shishir Dube, Suzie El-Saden, Usha Sinha, and Alan Yuille, Member, IEEE, Abstract— We present a new method for automatic segmen- T1 tation of heterogeneous image data that takes a step toward edema bridging the gap between bottom-up affinity-based segmentation methods and top-down generative model based approaches. The main contribution of the paper is a Bayesian formulation for incorporating soft model assignments into the calculation of affinities, which are conventionally model free. We integrate the necrotic resulting model-aware affinities into the multilevel segmentation by weighted aggregation algorithm, and apply the technique to the task of detecting and segmenting brain tumor and edema T2 active in multichannel MR volumes. The computationally efficient method runs orders of magnitude faster than current state-of- nec. the-art techniques giving comparable or improved results. Our quantitative results indicate the benefit of incorporating model- aware affinities into the segmentation process for the difficult edema case of brain tumor. Index Terms— Multilevel segmentation, normalized cuts, Bayesian affinity, brain tumor, glioblastoma multiforme I. INTRODUCTION Fig. 1. Labeled example of a brain tumor illustrating the importance of the different modalities (T1 with contrast and T2). Medical image analysis typically involves heterogeneous data that has been sampled from different underlying anatomic and pathologic physical processes. In the case of glioblastoma multiforme brain tumor (GBM), for example, the heteroge- A key problem in medical imaging is automatically seg- neous processes in study are the tumor itself, comprising menting an image into its constituent heterogeneous processes. -

Compositional Convolutional Neural Networks: a Deep Architecture with Innate Robustness to Partial Occlusion
Compositional Convolutional Neural Networks: A Deep Architecture with Innate Robustness to Partial Occlusion Adam Kortylewski Ju He Qing Liu Alan Yuille Johns Hopkins University Abstract Recent findings show that deep convolutional neural net- works (DCNNs) do not generalize well under partial occlu- sion. Inspired by the success of compositional models at classifying partially occluded objects, we propose to inte- grate compositional models and DCNNs into a unified deep model with innate robustness to partial occlusion. We term this architecture Compositional Convolutional Neural Net- work. In particular, we propose to replace the fully con- nected classification head of a DCNN with a differentiable compositional model. The generative nature of the compo- sitional model enables it to localize occluders and subse- Figure 1: Partially occluded cars from the MS-COCO quently focus on the non-occluded parts of the object. We dataset [20] that are misclassified by a standard DCNN conduct classification experiments on artificially occluded but correctly classified by the proposed CompositionalNet. images as well as real images of partially occluded objects Intuitively, a CompositionalNet can localize the occluders from the MS-COCO dataset. The results show that DC- (occlusion scores on the right) and subsequently focus on NNs do not classify occluded objects robustly, even when the non-occluded parts of the object to classify the image. trained with data that is strongly augmented with partial occlusions. Our proposed model outperforms standard DC- NNs by a large margin at classifying partially occluded ob- One approach to overcome this limitation is to use data jects, even when it has not been exposed to occluded ob- augmentation in terms of partial occlusion [6, 35]. -

Analysis, Interpretation and Synthesis of Facial Expressions by Irfan Aziz Essa
Analysis, Interpretation and Synthesis of Facial Expressions by Irfan Aziz Essa B.S., Illinois Institute of Technology (1988) S.M., Massachusetts Institute of Technology (1990) Submitted to the Program in Media Arts and Sciences, School of Architecture and Planning, in partial fulfillment of the requirements for the degree of Doctor of Philosophy at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY February 1995 @ Massachusetts Institute of Technology 1995. All rights reserved. Author......................................................... Program in Media Arts and Sciences September 20, 1994 ) /l Certifiedby................................... ..................... Alex P. Pentland Professor of Computers, Communication and Design Technology Program in Media Arts and Sciences, MIT Thesis Supervisor Accepted by ........................... .... Stephen A. Benton Chairman, Departmental Committee on Graduate Students Program in Media Arts and Sciences Analysis, Interpretation and Synthesis of Facial Expressions by Irfan Aziz Essa Submitted to the Program in Media Arts and Sciences, School of Architecture and Planning, on September 20, 1994, in partial fulfillment of the requirements for the degree of Doctor of Philosophy Abstract This thesis describes a computer vision system for observing the "action units" of a face using video sequences as input. The visual observation (sensing) is achieved by using an optimal estimation optical flow method coupled with a geometric and a physical (muscle) model describing the facial structure. This modeling results in a time-varying spatial patterning of facial shape and a parametric representation of the independent muscle action groups responsible for the observed facial motions. These muscle action patterns are then used for analysis, interpretation, recognition, and synthesis of facial expressions. Thus, by interpreting facial motions within a physics-based optimal estimation framework, a new control model of facial movement is developed. -

Deformable Templates for Face Recognition
Deformable Templates for Face Recognition Alan L. Yuille Division of Applied Science Harvard University Abstract Downloaded from http://mitprc.silverchair.com/jocn/article-pdf/3/1/59/1755719/jocn.1991.3.1.59.pdf by guest on 18 May 2021 We describe an approach for extracting facial features from data. Variations in the parameters correspond to allowable de- images and for determining the spatial organization between formations of the object and can be specified by a probabilis- these features using the concept of a deformable template. This tic model. After the extraction stage the parameters of the is a parameterized geometric model of the object to be rec- deformable template can be used for object description and ognized together with a measure of how well it fits the image recognition. LNTRODUCTION geometry will appear in the image and a corresponding measure of fitness, or matching criterion, to determine The sophistication of the human visual system is often how the template interacts with the image. taken for granted until we try to design artificial systems For many objects it is straightforward to specify a plau- with similar capabilities. In particular humans have an sible geometric model. Intuition is often a useful guide amazing ability to recognize faces seen from different and one can draw on the experience of artists (for ex- viewpoints, with various expressions and under a variety ample, Bridgman, 1973). Once the form of the model is of lighting conditions. It is hoped that current attempts specified it can be evaluated and the probability distri- to build computer vision face recognition systems will bution of the parameters determined by statistical tests, shed light on how humans perform this task and the given enough instances of the object.