Dissolved Oxygen Control in Activated Sludge Process Using a Neural Network-Based Adaptive PID Algorithm
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Combined Vermifiltration-Hydroponic System
applied sciences Article A Combined Vermifiltration-Hydroponic System for Swine Wastewater Treatment Kirill Ispolnov 1,*, Luis M. I. Aires 1,Nídia D. Lourenço 2 and Judite S. Vieira 1 1 Laboratory of Separation and Reaction Engineering-Laboratory of Catalysis and Materials (LSRE-LCM), School of Technology and Management (ESTG), Polytechnic Institute of Leiria, 2411-901 Leiria, Portugal; [email protected] (L.M.I.A.); [email protected] (J.S.V.) 2 Applied Molecular Biosciences Unit (UCIBIO)-REQUIMTE, Department of Chemistry, NOVA School of Science and Technology (FCT), NOVA University of Lisbon, 2829-516 Caparica, Portugal; [email protected] * Correspondence: [email protected] Abstract: Intensive swine farming causes strong local environmental impacts by generating ef- fluents rich in solids, organic matter, nitrogen, phosphorus, and pathogenic bacteria. Insufficient treatment of hog farm effluents has been reported for common technologies, and vermifiltration is considered a promising treatment alternative that, however, requires additional processes to remove nitrate and phosphorus. This work aimed to study the use of vermifiltration with a downstream hydroponic culture to treat hog farm effluents. A treatment system comprising a vermifilter and a downstream deep-water culture hydroponic unit was built. The treated effluent was reused to dilute raw wastewater. Electrical conductivity, pH, and changes in BOD5, ammonia, nitrite, nitrate, phosphorus, and coliform bacteria were assessed. Plants were monitored throughout the experiment. Electrical conductivity increased due to vermifiltration; pH stayed within a neutral to mild alkaline range. Vermifiltration removed 83% of BOD5, 99% of ammonia and nitrite, and increased nitrate by Citation: Ispolnov, K.; Aires, L.M.I.; 11%. -

Treatment of Sewage by Vermifiltration: a Review
Treatment of Sewage by Vermifiltration: A Review 1 2 Jatin Patel , Prof. Y. M. Gajera 1 M.E. Environmental Management, L.D. College of Engineering Ahmedabad -15 2 Assistant professor, Environmental Engineering, L.D. College of Engineering Ahmedabad -15 Abstract: A centralized treatment facility often faces problems of high cost of collection, treatment and disposal of wastewater and hence the growing needs for small scale decentralized eco-friendly alternative treatment options are necessary. Vermifiltration is such method where wastewater is treated using earthworms. Earthworm's body works as a biofilter and have been found to remove BOD, COD, TDS, and TSS by general mechanism of ingestion, biodegradation, and absorption through body walls. There is no sludge formation in vermifiltration process which requires additional cost on landfill disposal and it is also odor-free process. Treated water also can used for farm irrigation and in parks and gardens. The present study will evaluate the performance of vermifiltration for parameters like BOD, COD, TDS, TSS, phosphorus and nitrogen for sewage. Keywords: Vermifiltration, Earthworms, Wastewater, Ingestion, Absorption Introduction Due to the increasing population and scarcity of treatment area, high cost of wastewater collection and its treatment is not allowing the conventional STP everywhere. Hence, cost effective decentralized and eco-friendly treatments are required. Many developing countries can‟t afford the construction of STPs, and thus, there is a growing need for developing some ecologically safe and economically viable onsite small-scale wastewater treatment technologies. [24] The discharge of untreated wastewater in surface and sub-surface water courses is the most important source of contamination of water resources. -

The Biological Treatment Method for Landfill Leachate
E3S Web of Conferences 202, 06006 (2020) https://doi.org/10.1051/e3sconf/202020206006 ICENIS 2020 The biological treatment method for landfill leachate Siti Ilhami Firiyal Imtinan1*, P. Purwanto1,2, Bambang Yulianto1,3 1Master Program of Environmental Science, School of Postgraduate Studies, Diponegoro University, Semarang - Indonesia 2Department of Chemical Engineering, Faculty of Engineering, Diponegoro University, Semarang - Indonesia 3Department of Marine Sciences, Faculty of Fisheries and Marine Sciences, Diponegoro University, Semarang - Indonesia Abstract. Currently, waste generation in Indonesia is increasing; the amount of waste generated in a year is around 67.8 million tons. Increasing the amount of waste generation can cause other problems, namely water from the decay of waste called leachate. Leachate can contaminate surface water, groundwater, or soil if it is streamed directly into the environment without treatment. Between physical and chemical, biological methods, and leachate transfer, the most effective treatment is the biological method. The purpose of this article is to understand the biological method for leachate treatment in landfills. It can be concluded that each method has different treatment results because it depends on the leachate characteristics and the treatment method. These biological methods used to treat leachate, even with various leachate characteristics, also can be combined to produce effluent from leachate treatment below the established standards. Keywords. Leachate treatment; biological method; landfill leachate. 1. Introduction Waste generation in Indonesia is increasing, as stated by the Minister of Environment and Forestry, which recognizes the challenges of waste problems in Indonesia are still very large. The amount of waste generated in a year is around 67.8 million tons and will continue to grow in line with population growth [1]. -

Sequencing Batch Reactors: Principles, Design/Operation and Case Studies - S
WATER AND WASTEWATER TREATMENT TECHNOLOGIES - Sequencing Batch Reactors: Principles, Design/Operation and Case Studies - S. Vigneswaran, M. Sundaravadivel, D. S. Chaudhary SEQUENCING BATCH REACTORS: PRINCIPLES, DESIGN/OPERATION AND CASE STUDIES S. Vigneswaran, M. Sundaravadivel, and D. S. Chaudhary Faculty of Engineering and Information Technology, School of Civil and Environmental Engineering and Information Technology, University of Technology Sydney, Australia Keywords: Activated sludge process, return activated sludge, sludge settling, wastewater treatment, Contents 1. Background 2. The SBR technology for wastewater treatment 3. Physical description of the SBR system 3.1 FILL Phase 3.2 REACT Phase 3.3 SETTLE Phase 3.4 DRAW or DECANT Phase 3.5 IDLE Phase 4. Components and configuration of SBR system 5. Control of biological reactions through operating strategies 6. Design of SBR reactor 7. Costs of SBR 8. Case studies 8.1 Quakers Hill STP 8.2 SBR for Nutrient Removal at Bathhurst Sewage Treatment Plant 8.3 St Marys Sewage Treatment plant 8.4 A Small Cheese-Making Dairy in France 8.5 A Full-scale Sequencing Batch Reactor System for Swine Wastewater Treatment, Lo and Liao (2007) 8.6 Sequencing Batch Reactor for Biological Treatment of Grey Water, Lamin et al. (2007) 8.7 SBR Processes in Wastewater Plants, Larrea et al (2007) 9. Conclusion GlossaryUNESCO – EOLSS Bibliography Biographical Sketches SAMPLE CHAPTERS Summary Sequencing batch reactor (SBR) is a fill-and-draw activated sludge treatment system. Although the processes involved in SBR are identical to the conventional activated sludge process, SBR is compact and time oriented system, and all the processes are carried out sequentially in the same tank. -

Troubleshooting Activated Sludge Processes Introduction
Troubleshooting Activated Sludge Processes Introduction Excess Foam High Effluent Suspended Solids High Effluent Soluble BOD or Ammonia Low effluent pH Introduction Review of the literature shows that the activated sludge process has experienced operational problems since its inception. Although they did not experience settling problems with their activated sludge, Ardern and Lockett (Ardern and Lockett, 1914a) did note increased turbidity and reduced nitrification with reduced temperatures. By the early 1920s continuous-flow systems were having to deal with the scourge of activated sludge, bulking (Ardem and Lockett, 1914b, Martin 1927) and effluent suspended solids problems. Martin (1927) also describes effluent quality problems due to toxic and/or high-organic- strength industrial wastes. Oxygen demanding materials would bleedthrough the process. More recently, Jenkins, Richard and Daigger (1993) discussed severe foaming problems in activated sludge systems. Experience shows that controlling the activated sludge process is still difficult for many plants in the United States. However, improved process control can be obtained by systematically looking at the problems and their potential causes. Once the cause is defined, control actions can be initiated to eliminate the problem. Problems associated with the activated sludge process can usually be related to four conditions (Schuyler, 1995). Any of these can occur by themselves or with any of the other conditions. The first is foam. So much foam can accumulate that it becomes a safety problem by spilling out onto walkways. It becomes a regulatory problem as it spills from clarifier surfaces into the effluent. The second, high effluent suspended solids, can be caused by many things. It is the most common problem found in activated sludge systems. -
Wastewater Technology Fact Sheet: Trickling Filters
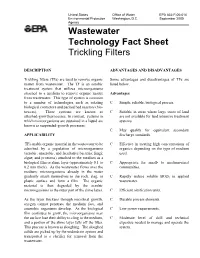
United States Office of Water EPA 832-F-00-014 Environmental Protection Washington, D.C. September 2000 Agency Wastewater Technology Fact Sheet Trickling Filters DESCRIPTION ADVANTAGES AND DISADVANTAGES Trickling filters (TFs) are used to remove organic Some advantages and disadvantages of TFs are matter from wastewater. The TF is an aerobic listed below. treatment system that utilizes microorganisms attached to a medium to remove organic matter Advantages from wastewater. This type of system is common to a number of technologies such as rotating C Simple, reliable, biological process. biological contactors and packed bed reactors (bio- towers). These systems are known as C Suitable in areas where large tracts of land attached-growth processes. In contrast, systems in are not available for land intensive treatment which microorganisms are sustained in a liquid are systems. known as suspended-growth processes. C May qualify for equivalent secondary APPLICABILITY discharge standards. TFs enable organic material in the wastewater to be C Effective in treating high concentrations of adsorbed by a population of microorganisms organics depending on the type of medium (aerobic, anaerobic, and facultative bacteria; fungi; used. algae; and protozoa) attached to the medium as a biological film or slime layer (approximately 0.1 to C Appropriate for small- to medium-sized 0.2 mm thick). As the wastewater flows over the communities. medium, microorganisms already in the water gradually attach themselves to the rock, slag, or C Rapidly reduce soluble BOD5 in applied plastic surface and form a film. The organic wastewater. material is then degraded by the aerobic microorganisms in the outer part of the slime layer. -
The Activated Sludge Process Part 1 Revised July 2014
Wastewater Treatment Plant Operator Certification Training Module 15: The Activated Sludge Process Part 1 Revised July 2014 This course includes content developed by the Pennsylvania Department of Environmental Protection (Pa. DEP) in cooperation with the following contractors, subcontractors, or grantees: The Pennsylvania State Association of Township Supervisors (PSATS) Gannett Fleming, Inc. Dering Consulting Group Penn State Harrisburg Environmental Training Center MODULE 15: THE ACTIVATED SLUDGE PROCESS - PART 1 Topical Outline Unit 1 – General Description of the Activated Sludge Process I. Definitions A. Activated Sludge B. Activated Sludge Process II. The Activated Sludge Process Description A. Organisms B. Secondary Clarification C. Activated Sludge Process Control III. Activated Sludge Plants A. Types of Plants B. Factors that Upset Plant Operation IV. Unit Review V. References Unit 2 – Aeration I. Purpose of Aeration II. Aeration Methods A. Mechanical B. Diffused III. Aeration Systems A. Mechanical Aeration Systems B. Diffused Aeration Systems Bureau of Safe Drinking Water, Department of Environmental Protection Wastewater Treatment Plant Operator Training i MODULE 15: THE ACTIVATED SLUDGE PROCESS - PART 1 IV. Safety Procedures A. Aeration Tanks and Clarifiers B. Surface Aerators C. Air Filters D. Blowers E. Air Distribution System F. Air Headers and Diffusers V. Review VI. References Unit 3 – New Plant Start-Up Procedures I. Purpose of Plant and Equipment Review A. Document Familiarization B. Equipment Familiarization II. Equipment and Structures Check A. Flow Control Gates and Valves B. Piping and Channels C. Weirs D. Froth Control System E. Air System F. Secondary Clarifier III. Process Start-Up A. Process Units B. Process Control IV. Unit Review V. -
The Activated Sludge Process Part II Revised October 2014
Wastewater Treatment Plant Operator Certification Training Module 16: The Activated Sludge Process Part II Revised October 2014 This course includes content developed by the Pennsylvania Department of Environmental Protection (Pa. DEP) in cooperation with the following contractors, subcontractors, or grantees: The Pennsylvania State Association of Township Supervisors (PSATS) Gannett Fleming, Inc. Dering Consulting Group Penn State Harrisburg Environmental Training Center MODULE 16: THE ACTIVATED SLUDGE PROCESS – PART II Topical Outline Unit 1 – Process Control Strategies I. Key Monitoring Locations A. Plant Influent B. Primary Clarifier Effluent C. Aeration Tank D. Secondary Clarifier E. Internal Plant Recycles F. Plant Effluent II. Key Process Control Parameters A. Mean Cell Residence Time (MCRT) B. Food/Microorganism Ratio (F/M Ratio) C. Sludge Volume Index (SVI) D. Specific Oxygen Uptake Rate (SOUR) E. Sludge Wasting III. Daily Process Control Tasks A. Record Keeping B. Review Log Book C. Review Lab Data Unit 2 – Typical Operational Problems I. Process Operational Problems A. Plant Changes B. Sludge Bulking C. Septic Sludge D. Rising Sludge E. Foaming/Frothing F. Toxic Substances II. Process Troubleshooting Guide Bureau of Safe Drinking Water, Department of Environmental Protection i Wastewater Treatment Plant Operator Training MODULE 16: THE ACTIVATED SLUDGE PROCESS – PART II III. Equipment Operational Problems and Maintenance A. Surface Aerators B. Air Filters C. Blowers D. Air Distribution System E. Air Header/Diffusers F. Motors G. Gear Reducers Unit 3 – Microbiology of the Activated Sludge Process I. Why is Microbiology Important in Activated Sludge? A. Activated Sludge is a Biological Process B. Tools for Process Control II. Microorganisms in Activated Sludge A. -

Mature Landfill Leachate Treatment from an Abandoned Municipal Waste Disposal Site
Korean J. Chem. Eng., 18(2), 233-239 (2001) Mature Landfill Leachate Treatment from an Abandoned Municipal Waste Disposal Site Joon Moo Hur†, Jong An Park*, Bu Soon Son*, Bong Gi Jang and Seong Hong Kim** Green Engineering & Construction, Co. Ltd., Green Building 8th floor, 79-2 Karak-Dong, Songpa-Gu, Seoul 138-711, Korea *Department of Environmental Health Science, College of Natural Science, Soonchunhyang University, San 53-1, Eupnae-Ri, Shinchang-Myeon, Asan-City, Choongchungnam-Do 336-745, Korea **New Environment Research Engineering Co., Ewha Building 4th floor #402, 8-21 Yangjae-Dong, Seocho-Gu, Seoul 137-130, Korea (Received 30 November 2000 • accepted 22 January 2001) Abstract−We investigated treatment techniques for the leachates derived from an abandoned waste disposal landfill facility known as Nan Ji Do in Seoul, Korea. To this end, the general characteristics of those leachates were carefully examined. The feasibility of leachate handling techniques was then examined through an application of both off- and on-site processes as a combination of direct treatment methods and/or pretreatment options. They include operation of such systems or methods as: (1) activated sludge process, (2) adsorption-flocculation methods, and (3) anaerobic digestion. When the fundamental factors associated with the operation of an activated sludge process were tested by a simulated system in the laboratory, those applications were found to be efficient at leachate addition of up to 1%. Application of adsorption/precipitation method was also tested as the pretreatment option for leachates by using both powdered activated carbon (PAC) as adsorbent and aluminum sulfate (alum) as flocculant. -

Sludge Treatment and Disposal Biological Wastewater Treatment Series
Sludge Treatment and Disposal Biological Wastewater Treatment Series The Biological Wastewater Treatment series is based on the book Biological Wastewater Treatment in Warm Climate Regions and on a highly acclaimed set of best selling textbooks. This international version is comprised by six textbooks giving a state-of-the-art presentation of the science and technology of biological wastewater treatment. Titles in the Biological Wastewater Treatment series are: Volume 1: Wastewater Characteristics, Treatment and Disposal Volume 2: Basic Principles of Wastewater Treatment Volume 3: Waste Stabilisation Ponds Volume 4: Anaerobic Reactors Volume 5: Activated Sludge and Aerobic Biofilm Reactors Volume 6: Sludge Treatment and Disposal Biological Wastewater Treatment Series VOLUME SIX Sludge Treatment and Disposal Cleverson Vitorio Andreoli, Marcos von Sperling and Fernando Fernandes (Editors) Published by IWA Publishing, Alliance House, 12 Caxton Street, London SW1H 0QS, UK Telephone: +44 (0) 20 7654 5500; Fax: +44 (0) 20 7654 5555; Email: [email protected] Website: www.iwapublishing.com First published 2007 C 2007 IWA Publishing Copy-edited and typeset by Aptara Inc., New Delhi, India Printed by Lightning Source Apart from any fair dealing for the purposes of research or private study, or criticism or review, as permitted under the UK Copyright, Designs and Patents Act (1998), no part of this publication may be reproduced, stored or transmitted in any form or by any means, without the prior permission in writing of the publisher, or, in the case of photographic reproduction, in accordance with the terms of licences issued by the Copyright Licensing Agency in the UK, or in accordance with the terms of licenses issued by the appropriate reproduction rights organization outside the UK. -

Activated Sludge Microbial Community and Treatment Performance of Wastewater Treatment Plants in Industrial and Municipal Zones
International Journal of Environmental Research and Public Health Article Activated Sludge Microbial Community and Treatment Performance of Wastewater Treatment Plants in Industrial and Municipal Zones Yongkui Yang 1,2 , Longfei Wang 1, Feng Xiang 1, Lin Zhao 1,2 and Zhi Qiao 1,2,* 1 School of Environmental Science and Engineering, Tianjin University, Tianjin 300350, China; [email protected] (Y.Y.); [email protected] (L.W.); [email protected] (F.X.); [email protected] (L.Z.) 2 China-Singapore Joint Center for Sustainable Water Management, Tianjin University, Tianjin 300350, China * Correspondence: [email protected]; Tel.: +86-22-87402072 Received: 14 November 2019; Accepted: 7 January 2020; Published: 9 January 2020 Abstract: Controlling wastewater pollution from centralized industrial zones is important for reducing overall water pollution. Microbial community structure and diversity can adversely affect wastewater treatment plant (WWTP) performance and stability. Therefore, we studied microbial structure, diversity, and metabolic functions in WWTPs that treat industrial or municipal wastewater. Sludge microbial community diversity and richness were the lowest for the industrial WWTPs, indicating that industrial influents inhibited bacterial growth. The sludge of industrial WWTP had low Nitrospira populations, indicating that influent composition affected nitrification and denitrification. The sludge of industrial WWTPs had high metabolic functions associated with xenobiotic and amino acid metabolism. Furthermore, bacterial richness was positively correlated with conventional pollutants (e.g., carbon, nitrogen, and phosphorus), but negatively correlated with total dissolved solids. This study was expected to provide a more comprehensive understanding of activated sludge microbial communities in full-scale industrial and municipal WWTPs. Keywords: activated sludge; industrial zone; metabolic function; microbial community; wastewater treatment 1. -

Evaluation of a Sequencing Batch Reactor Followed by Media Filtration for Organic and Nutrient Removal from Produced Water
EVALUATION OF A SEQUENCING BATCH REACTOR FOLLOWED BY MEDIA FILTRATION FOR ORGANIC AND NUTRIENT REMOVAL FROM PRODUCED WATER by Emily R. Nicholas A thesis submitted to the Faculty and the Board of Trustees of the Colorado School of Mines in partial fulfillment of the requirements for the degree of Masters of Science (Civil and Environmental Engineering). Golden, Colorado Date ____________________________ Signed: ______________________________ Emily R. Nicholas Signed: ______________________________ Dr. Tzahi Y. Cath Thesis Advisor Golden, Colorado Date ____________________________ Signed: _______________________________ Dr. John McCray Professor and Head Department of Civil and Environmental Engineering ii ABSTRACT With technological advances such as hydraulic fracturing, the oil and gas industry now has access to petroleum reservoirs that were previously uneconomical to develop. Some of the reservoirs are located in areas that already have scarce water resources due to drought, climate change, or population. Oilfield operations introduce additional water stress and create a highly complex and variable waste stream called produced water. Produced water contains high concentrations of total dissolved solids (TDS), metals, organic matter, and in some cases naturally occurring radioactive material. In areas of high water stress, beneficial reuse of produced water needs to be considered. Sequencing batch reactors (SBR) have been used to facilitate biological organic and nutrient removal from domestic waste streams. Although the bacteria responsible for the treatment of domestic sources cannot tolerate the high TDS concentrations in produced water, the microorganisms native to produced water have the functional potential to treat produced water. In a bench scale bioreactor jar test using produced water from the Denver-Julesburg Basin, the produced water collected was determined to be nutrient limited with respect to phosphorus.