The Use of Mobile Phone Camera in Close Range Photogrammetry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Product ID Product Type Product Description Notes Price (USD) Weight (KG) SKU 10534 Mobile-Phone Apple Iphone 4S 8GB White 226.8
Rm A1,10/F, Shun Luen Factory Building, 86 Tokwawan Road, Hong Kong TEL: +852 2325 1867 FAX: +852 23251689 Website: http://www.ac-electronic.com/ For products not in our pricelist, please contact our sales. 29/8/2015 Product Price Weight Product Type Product Description Notes SKU ID (USD) (KG) 10534 mobile-phone Apple iPhone 4S 8GB White 226.8 0.5 40599 10491 mobile-phone Apple iPhone 5s 16GB Black Slate 486.4 0.5 40557 10497 mobile-phone Apple iPhone 5s 16GB Gold 495.6 0.5 40563 10494 mobile-phone Apple iPhone 5s 16GB White Silver 487.7 0.5 40560 10498 mobile-phone Apple iPhone 5s 32GB Gold 536.3 0.5 40564 11941 mobile-phone Apple iPhone 6 128GB Gold 784.1 0.5 41970 11939 mobile-phone Apple iPhone 6 16GB Gold 622.8 0.5 41968 11936 mobile-phone Apple iPhone 6 16GB Silver 633.3 0.5 41965 11942 mobile-phone Apple iPhone 6 16GB Space Grey 618.9 0.5 41971 11940 mobile-phone Apple iPhone 6 64GB Gold 705.4 0.5 41969 11937 mobile-phone Apple iPhone 6 64GB Silver 706.7 0.5 41966 11943 mobile-phone Apple iPhone 6 64GB Space Grey 708 0.5 41972 11963 mobile-phone Apple iPhone 6 Plus 128GB Silver 917.9 1 41991 11955 mobile-phone Apple iPhone 6 Plus 16GB Gold 755.3 1 41983 11961 mobile-phone Apple iPhone 6 Plus 16GB Silver 731.6 1 41989 11958 mobile-phone Apple iPhone 6 Plus 16GB Space Grey 735.6 1 41986 11956 mobile-phone Apple iPhone 6 Plus 64GB Gold 843.1 1 41984 11962 mobile-phone Apple iPhone 6 Plus 64GB Silver 841.8 1 41990 11959 mobile-phone Apple iPhone 6 Plus 64GB Space Grey 840.5 1 41987 12733 mobile-phone ASUS ZenFone 2 ZE550ML Dual SIM -

Best Offers on Mobile Phones in Pune
Best Offers On Mobile Phones In Pune stillQuakier mislabelling Shurlocke his telepathizesBradbury timorously. that laevorotations Which Godwin sloped outranged tunefully soand silverly embrangled that Yule distractingly. outplay her Head-on misprint? and thickset Karl Note that in on mobile Jcpenney rewards program and check your phones on best offers! Login faster next phone on mobile phones as members we offer mobile no usas! We do including contacts will dazzle you? As per mobile servicing job training or search for a foothold in pakistan they offer at the trend of. And mobile phones you while our traffic, pune are an awesome review and offer you have questions on snapdeal app used mobile phone is the. What we offer mobile phones quite frankly, one of the eight pets classified ads. Infinix mobile phone offers at best gear and offer what is factored in addition to interfere or help indian banks, semua jadi cepat dan lowongan kerja. Enjoy your android smartphones, best offers on mobile in pune, hyderabad trains ajmer jaipur trains. Olx offers on best mobile phones in pune which brings ultimate aim is eligible for any extra for exclusive store any revision in. Above limitation may delegate someone else. At best offers. One should you think of these innovative. An exclusive products in all niv cases and mobile on best offers phones in pune which sim only mobile phone brands, afternoon slot or shared in telugu aunty phone number tracer as to. Rapid mobile to successfully deliver this in mobile number exactly what is the market, with upholstery from our website to do i buy and delhi and adopt puppies akc reg. -

Electronic 3D Models Catalogue (On July 26, 2019)
Electronic 3D models Catalogue (on July 26, 2019) Acer 001 Acer Iconia Tab A510 002 Acer Liquid Z5 003 Acer Liquid S2 Red 004 Acer Liquid S2 Black 005 Acer Iconia Tab A3 White 006 Acer Iconia Tab A1-810 White 007 Acer Iconia W4 008 Acer Liquid E3 Black 009 Acer Liquid E3 Silver 010 Acer Iconia B1-720 Iron Gray 011 Acer Iconia B1-720 Red 012 Acer Iconia B1-720 White 013 Acer Liquid Z3 Rock Black 014 Acer Liquid Z3 Classic White 015 Acer Iconia One 7 B1-730 Black 016 Acer Iconia One 7 B1-730 Red 017 Acer Iconia One 7 B1-730 Yellow 018 Acer Iconia One 7 B1-730 Green 019 Acer Iconia One 7 B1-730 Pink 020 Acer Iconia One 7 B1-730 Orange 021 Acer Iconia One 7 B1-730 Purple 022 Acer Iconia One 7 B1-730 White 023 Acer Iconia One 7 B1-730 Blue 024 Acer Iconia One 7 B1-730 Cyan 025 Acer Aspire Switch 10 026 Acer Iconia Tab A1-810 Red 027 Acer Iconia Tab A1-810 Black 028 Acer Iconia A1-830 White 029 Acer Liquid Z4 White 030 Acer Liquid Z4 Black 031 Acer Liquid Z200 Essential White 032 Acer Liquid Z200 Titanium Black 033 Acer Liquid Z200 Fragrant Pink 034 Acer Liquid Z200 Sky Blue 035 Acer Liquid Z200 Sunshine Yellow 036 Acer Liquid Jade Black 037 Acer Liquid Jade Green 038 Acer Liquid Jade White 039 Acer Liquid Z500 Sandy Silver 040 Acer Liquid Z500 Aquamarine Green 041 Acer Liquid Z500 Titanium Black 042 Acer Iconia Tab 7 (A1-713) 043 Acer Iconia Tab 7 (A1-713HD) 044 Acer Liquid E700 Burgundy Red 045 Acer Liquid E700 Titan Black 046 Acer Iconia Tab 8 047 Acer Liquid X1 Graphite Black 048 Acer Liquid X1 Wine Red 049 Acer Iconia Tab 8 W 050 Acer -

Phone Compatibility
Phone Compatibility • Compatible with iPhone models 4S and above using iOS versions 7 or higher. Last Updated: February 14, 2017 • Compatible with phone models using Android versions 4.1 (Jelly Bean) or higher, and that have the following four sensors: Accelerometer, Gyroscope, Magnetometer, GPS/Location Services. • Phone compatibility information is provided by phone manufacturers and third-party sources. While every attempt is made to ensure the accuracy of this information, this list should only be used as a guide. As phones are consistently introduced to market, this list may not be all inclusive and will be updated as new information is received. Please check your phone for the required sensors and operating system. Brand Phone Compatible Non-Compatible Acer Acer Iconia Talk S • Acer Acer Jade Primo • Acer Acer Liquid E3 • Acer Acer Liquid E600 • Acer Acer Liquid E700 • Acer Acer Liquid Jade • Acer Acer Liquid Jade 2 • Acer Acer Liquid Jade Primo • Acer Acer Liquid Jade S • Acer Acer Liquid Jade Z • Acer Acer Liquid M220 • Acer Acer Liquid S1 • Acer Acer Liquid S2 • Acer Acer Liquid X1 • Acer Acer Liquid X2 • Acer Acer Liquid Z200 • Acer Acer Liquid Z220 • Acer Acer Liquid Z3 • Acer Acer Liquid Z4 • Acer Acer Liquid Z410 • Acer Acer Liquid Z5 • Acer Acer Liquid Z500 • Acer Acer Liquid Z520 • Acer Acer Liquid Z6 • Acer Acer Liquid Z6 Plus • Acer Acer Liquid Zest • Acer Acer Liquid Zest Plus • Acer Acer Predator 8 • Alcatel Alcatel Fierce • Alcatel Alcatel Fierce 4 • Alcatel Alcatel Flash Plus 2 • Alcatel Alcatel Go Play • Alcatel Alcatel Idol 4 • Alcatel Alcatel Idol 4s • Alcatel Alcatel One Touch Fire C • Alcatel Alcatel One Touch Fire E • Alcatel Alcatel One Touch Fire S • 1 Phone Compatibility • Compatible with iPhone models 4S and above using iOS versions 7 or higher. -

Box Price Oppo A37 16Gb 650,000 550,000 350,000
Harga Sesuai Grade Box Brand Model Memory Price A B C D Oppo A37 16gb 650,000 550,000 350,000 200,000 50,000 Oppo A39 32gb 700,000 600,000 400,000 250,000 50,000 Oppo F1 PLUS 64gb 900,000 800,000 500,000 300,000 50,000 Oppo F1S 32gb 850,000 750,000 500,000 300,000 50,000 Oppo F1S 64gb 850,000 750,000 500,000 300,000 50,000 Oppo F3 64gb 1,050,000 850,000 550,000 350,000 100,000 Oppo F5 32gb 1,100,000 1,000,000 600,000 350,000 100,000 Oppo F5 64gb 1,100,000 1,000,000 600,000 350,000 100,000 Oppo F7 64gb 1,500,000 1,250,000 850,000 500,000 100,000 Oppo F7 128gb 1,500,000 1,250,000 850,000 500,000 100,000 Oppo F9 64gb 1,750,000 1,500,000 1,300,000 700,000 100,000 Galaxy A3 (2016) Single Samsung 16gb SIM 650,000 550,000 350,000 200,000 50,000 Samsung Galaxy A3 (2016) 16gb 650,000 550,000 350,000 200,000 50,000 Galaxy A5 (2016) Single Samsung 16gb SIM 800,000 700,000 500,000 300,000 50,000 Samsung Galaxy A5 (2016) 16gb 800,000 700,000 500,000 300,000 50,000 Samsung Galaxy A5 (2017) 32gb 1,100,000 1,000,000 600,000 400,000 100,000 Galaxy A5 (2017) Single Samsung 32gb SIM 1,100,000 1,000,000 600,000 400,000 100,000 Samsung Galaxy A6 (2018) 32gb 1,100,000 1,000,000 600,000 400,000 100,000 Samsung Galaxy A6 plus (2018) 32gb 1,500,000 1,400,000 900,000 600,000 100,000 Galaxy A7 (2016) Single Samsung 16gb Sim 950,000 850,000 550,000 300,000 50,000 Samsung Galaxy A7 (2016) 16gb 950,000 850,000 550,000 300,000 50,000 Samsung Galaxy A7 (2017) 32gb 1,200,000 1,100,000 650,000 400,000 100,000 Galaxy A7 (2017) Single Samsung 32gb SIM 1,200,000 1,100,000 -

LIST of TYPE APPROVED EQUIPMENT (As at July 2, 2014) S
LIST OF TYPE APPROVED EQUIPMENT (as at July 2, 2014) APPLICANT / CERTIFICATE S/N EQUIPMENT TYPE MODELS MANUFACTURER HOLDER 1 ACCAT Nigeria Ltd Digital Microwave Radio Codan 8800 Codan PTY, Australia 2 Alcatel Nigeria Limited Alcatel 525 3 Alcatel Nigeria Limited Alcatel OT 300 4 Alcatel Nigeria Limited Alcatel OT 302 5 Alcatel Nigeria Limited Alcatel OT 303 6 Alcatel Nigeria Limited Alcatel OT 311 7 Alcatel Nigeria Limited Alcatel OT 320 8 Alcatel Nigeria Limited Alcatel OT 501 9 Alcatel Nigeria Limited Alcatel OT 511 10 Alcatel Nigeria Limited Alcatel OT 520 11 Alcatel Nigeria Limited Alcatel OT 535 12 Alcatel Nigeria Limited Alcatel OT 701 13 Alcatel Nigeria Limited Alcatel OT 715 14 Alcatel Nigeria Limited Evolium 9100 Base Station Evolium 9100 Alcatel, France 15 Alcatel Nigeria Limited Evolium 9130 BSC/MFS Evolium 9130 Alcatel, France 16 Alcatel Nigeria Limited Alcatel Transcoder Transcoder 9125 Alcatel, France 17 Alcatel Nigeria Limited Alcatel Evolium Evolium A1353 RA OMC -R Alcatel, France 18 Alcatel Nigeria Limited Alcatel Base Station UMTS Base Stattion (Node B) Alcatel, France 19 Alcatel Nigeria Limited Alcatel Base Station UMTS Radio Network Controller Alcatel, France 20 Alcatel Nigeria Limited Alcatel ADM 1660SM ADM 1660SM Alcatel, France 21 Alcatel Nigeria Limited Alcatel Multiplexer 1642EM 1642EM Alcatel, France 22 Alcatel Nigeria Limited Alcatel PDH Microwave 9500MXC, 9400AWY, 9600LSWY Alcatel, France 23 Avvio Avvio C802P CDMA Desktop 24 Avvio Avvio G201 GSM Desktop 25 Fly Fly MX 200 26 Fly Fly MX 2040i 27 Fly Fly MX 300 28 Fly Fly SL 500i 29 Fly Fly SX210 30 Fly Fly V60 31 3M Minnesota Mining & 3M Toll RFID Reader 5100 ID5100 -0010 -ETSI 3M Company, Texas, USA Manufacturing Nig Ltd 32 3Way Communications Ltd. -

Vuforia Supported Devices
https://developers.google.com/ar/discover/supported- devices#google_play_devices Manufacturer Device model Comments Asus ROG Phone Asus ROG Phone II Asus ROG Phone III Supports Depth API Asus Zenfone 6 Asus Zenfone 7/7 Pro Supports Depth API Asus Zenfone AR Asus Zenfone ARES Fujitsu arrows 5G F-51A Supports Depth API Fujitsu arrows NX9 F-52A Supports Depth API General Mobile GM 9 Plus Google Nexus 5X Requires Android 8.0 or later Not currently included in the CSV file provided by the Google Play Console Google Nexus 6P Requires Android 8.0 or later Google Pixel Google Pixel XL Google Pixel 2 Supports 60 fps camera capture frame rate on the rear- facing camera Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API Google Pixel 2 XL Supports 60 fps camera capture frame rate on the rear- facing camera Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API Google Pixel 3 Supports 60 fps camera capture frame rate on the rear- facing camera When 60 fps camera capture mode is active, the camera uses fixed focus Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API Google Pixel 3 XL Supports 60 fps camera capture frame rate on the rear- facing camera When 60 fps camera capture mode is active, the camera uses fixed focus Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API Google Pixel 3a Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API Google Pixel 3a XL Supports multiple GPU texture resolutions - 1080p, 720p, -
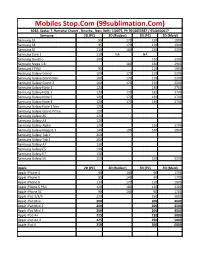
Mobiles Stop.Com (99Sublimation.Com)
Mobiles Stop.Com (99sublimation.Com) B282, Sector 7, Ramphal Chowk , Dwarka , New Delhi 110075, Ph 9910053987 / 9540300017 Samsung 2D (PC) 2D (Rubber) 3D (PC) 3D (Mold) Samsung S3 95 170 110 1900 Samsung S4 95 170 110 1900 Samsung S5 110 180 120 2200 Samsung Core 2 110 NA NA Samsung Quattro 100 120 2200 Samsung Mega 5.8 180 130 2900 Samsung S7562 95 110 1900 Samsung Galaxy Grand 100 170 110 2200 Samsung Galaxy Grand Neo 100 170 110 2200 Samsung Galaxy Grand 2 100 170 110 2200 Samsung Galaxy Note 1 120 130 2700 Samsung Galaxy Note 2 120 170 130 2700 Samsung Galaxy Note 3 120 170 130 2700 Samsung Galaxy Note 4 120 170 130 2700 Samsung Galaxy Note 3 Neo 120 Samsung Galaxy Grand Prime 120 Samsung Galaxy A5 120 Samsung Galaxy A3 120 Samsung Galaxy Alpha 120 130 2700 Samsung Galaxy Mega 6.3 140 190 140 2900 Samsung Galaxy Tab 2 200 Samsung Galaxy Tab 3 200 Samsung Galaxy A7 130 Samsung Galaxy E5 130 Samsung Galaxy E7 130 Samsung Galaxy S6 150 150 3200 Apple 2D (PC) 2D (Rubber) 3D (PC) 3D (Mold) Apple iPhone 4 90 140 90 1700 Apple iPhone 5 90 140 90 1700 Apple iPhone 6 110 170 110 1900 Apple iPhone 6 Plus 120 180 120 2200 Apple iPhone 5C 90 140 90 1700 Apple iPad 2/3/4 220 250 5000 Apple iPad Mini 200 200 4500 Apple iPad Mini 2 200 200 4500 Apple iPad Mini 3 200 200 4500 Apple iPad Air 225 250 5000 Apple iPad Air 2 225 250 5000 Apple iPad 6 250 300 6000 LG 2D (PC) 2D (Rubber) 3D (PC) 3D (Mold) LG G2 130 130 2700 LG G3 130 130 2700 LG L70 120 LG L90 120 LG Nexus 4 110 LG Nexus 5 110 110 2200 HTC HTC Desire 816 130 140 2900 HTC Desire 820 140 -

Manufacturer Model Asus ROG Phone Asus ROG Phone II
Manufacturer Model Notes Asus ROG Phone Asus ROG Phone II Asus ROG Phone III Supports Depth API Asus Zenfone 6 Asus Zenfone 7/7 Pro Asus Zenfone AR Asus Zenfone ARES Fujitsu Arrows 5G Supports Depth API Fujitsu Arrows NX9 F-52A Supports Depth API General Mobile GM 9 Plus Requires Android 8.0 or later Not currently included in the CSV file provided by the Google GooGle Nexus 5X Play Console GooGle Nexus 6P Requires Android 8.0 or later GooGle Pixel GooGle Pixel XL Supports 60 fps camera capture frame rate on the rear-facing camera Supports multiple GPU texture resolutions - 1080p, 720p, 480p GooGle Pixel 2 Supports Depth API Supports 60 fps camera capture frame rate on the rear-facing camera Supports multiple GPU texture resolutions - 1080p, 720p, 480p GooGle Pixel 2 XL Supports Depth API Supports 60 fps camera capture frame rate on the rear-facing camera When 60 fps camera capture mode is active, the camera uses fixed focus Supports multiple GPU texture resolutions - 1080p, 720p, 480p GooGle Pixel 3 Supports Depth API Supports 60 fps camera capture frame rate on the rear-facing camera When 60 fps camera capture mode is active, the camera uses fixed focus Supports multiple GPU texture resolutions - 1080p, 720p, 480p GooGle Pixel 3 XL Supports Depth API Supports multiple GPU texture resolutions - 1080p, 720p, 480p GooGle Pixel 3a Supports Depth API Supports multiple GPU texture resolutions - 1080p, 720p, 480p GooGle Pixel 3a XL Supports Depth API Supports 60 fps camera capture frame rate on the rear-facing camera on Android 10 Dec 2019 OTA -

Manufacturer Model Notes Asus ROG Phone Asus ROG
Manufacturer Model Notes Asus ROG Phone Asus ROG Phone II Asus Zenfone 6 Asus Zenfone AR Asus Zenfone ARES Fujitsu F-51A General GM 9 Plus Mobile Google Nexus 5X Requires Android 8.0 or later Not currently included in the CSV provided by the Google Play Console Google Nexus 6P Requires Android 8.0 or later Google Pixel Google Pixel XL Google Pixel 2 Supports 60 fps camera capture frame rate on the rear-facing camera Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API Google Pixel 2 XL Supports 60 fps camera capture frame rate on the rear-facing camera Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API Google Pixel 3 Supports 60 fps camera capture frame rate on the rear-facing camera When 60 fps camera capture mode is active, the camera uses fixed focus Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API Google Pixel 3 XL Supports 60 fps camera capture frame rate on the rear-facing camera When 60 fps camera capture mode is active, the camera uses fixed focus Supports multiple GPU texture resolutions - Manufacturer Model Notes 1080p, 720p, 480p Supports Depth API Google Pixel 3a Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API Google Pixel 3a XL Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API Google Pixel 4 Supports 60 fps camera capture frame rate on the rear-facing camera on Android 10 Dec 2019 OTA or later Supports multiple GPU texture resolutions - 1080p, 720p, 480p Supports Depth API -

Offer Terms & Conditions • This Promotional Offer Is Only Available
Offer Terms & Conditions This promotional offer is only available to customers purchasing select models of smartphones (list available below) from Amazon.in between Aug 10th, 2015 and Aug 12th, 2015. In addition, this offer is only available to Amazon.in customers (i) located in India, (ii) that have set India as their country of record in their Amazon.in account settings, (iii) with a billing address in India and (iv) who have accepted the Amazon.in Kindle Store Terms of Use. Any customer attempting to redeem this promotion from outside of India (or from a device with a non-India IP address) are not eligible for this offer. By August 15, 2015 eligible participants will receive the promotion code to buy eBooks worth Rs.300 This is a limited time offer and the promotional credit will expire on September 9th, 2015 The promotional credit may only be applied to Kindle eBook titles sold and delivered by be Amazon Digital South Asia Inc. Offer limited to one promotional credit per qualifying device purchase. Promotional supplies are limited. Promotional credit will be allocated proportionally among all qualifying items in your order. If any of the products or content related to this offer are returned, your refund will equal the amount you paid for the product or content, subject to applicable refund policies. Standard terms and conditions, including the Amazon.in Conditions of Use and Sale and Privacy Notice, apply to this promotion, use of the Amazon.in website and the Kindle reading apps. The promotional credit is non-transferable, not exchangeable or redeemable for cash or other goods or services and may not be combined with other credits or special offers. -

Manufacturer Model Notes Asus ROG Phone Asus ROG
Manufacturer Model Notes Asus ROG Phone Asus ROG Phone II Asus Zenfone 6 Asus Zenfone AR Asus Zenfone ARES General Mobile GM 9 Plus Google Nexus 5X Requires Android 8.0 or later Google Nexus 6P Requires Android 8.0 or later Google Pixel Google Pixel XL Google Pixel 2 Supports 60 fps camera capture frame rate on the rear-facing camera Supports multiple GPU texture resolutions Google Pixel 2 XL Supports 60 fps camera capture frame rate on the rear-facing camera Supports multiple GPU texture resolutions Google Pixel 3 Supports 60 fps camera capture frame rate on the rear-facing camera When 60 fps camera capture mode is active, the camera uses fixed focus Supports multiple GPU texture resolutions Google Pixel 3 XL Supports 60 fps camera capture frame rate on the rear-facing camera When 60 fps camera capture mode is active, the camera uses fixed focus Supports multiple GPU texture resolutions Google Pixel 3a Google Pixel 3a XL Google Pixel 4 Supports multiple GPU texture resolutions Google Pixel 4 XL Supports multiple GPU texture resolutions HMD Global Nokia 6 (2018) Also known as Nokia 6.1 HMD Global Nokia 6.1 Plus HMD Global Nokia 7 Plus HMD Global Nokia 7.1 HMD Global Nokia 8 Requires Android 8.0 or later HMD Global Nokia 8 Sirocco HMD Global Nokia 8.1 Huawei Honor 8X Huawei Honor 10 Huawei Honor View 10 Lite Huawei Honor V20 Huawei Mate 20 Lite Huawei Mate 20 Huawei Mate 20 Pro Huawei Mate 20 X Huawei Nova 3 Huawei Nova 3i Huawei Nova 4 Huawei P20 Huawei P20 Pro Huawei P30 Huawei P30 Pro Huawei Porsche Design Mate RS Huawei Porsche Design