Pushbot Build Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Game Manual Part 1 Remote Events
FIRST® GAME CHANGERSSM powered by Star Wars: Force for Change 2020-2021 FIRST ® Tech Challenge Game Manual Part 1 Remote Events FIRST® Tech Challenge Game Manual Part 1 – Remote Events | 2 Sponsor Thank You Thank you to our generous sponsors for your continued support of the FIRST® Tech Challenge! Sponsors Revision 1.1: 9/12/2020 FIRST® Tech Challenge Game Manual Part 1 – Remote Events | 3 Revision History Section Revision Date Description N/A 1 7/16/2020 Initial Release Sponsors 1.1 9/12/2020 Updated Sponsor lockup Section 5 1.1 9/12/2020 Section 5.2 – Clarified “top” 5 matches counted in a League Tournament Section 9 1 9/12/2020 Added Judging and Award Criteria section Appendix E 1 9/12/2020 Added Appendix E – Control Award Submission Form Section 4 1 10/7/2020 • Section 4.5 o Changed FTC Live Scoring to FTC Scoring System o • Section 7.3.4, Rule <RS03> o Removed “UltimateGoal” from minimum required software version Section 7 1.1 10/7/2020 o Renamed “REV PC Hub Interface Software” to “REV Hardware Client Software” o Updated version number of the REV Hardware Client Software Section 9 1.1 10/7/2020 Section 9.5.11 – Clarified 22 teams or larger Appendix E 1.1 10/7/2020 • Renamed engineering notebook to engineering portfolio • Added section for required link for control award submissions • PDF now editable Contents Contents ............................................................................................................................................................ 3 1.0 Introduction ................................................................................................................................................. -

Team Paragon 571, Located in Windsor
In a galaxy, just beyond Hartford, Connecticut, is the one and only Team Paragon 571, located in Windsor. As we progress through the build season, considerable progress has been made. Build is nearing completion, Programming has produced more code, Web has further organized the website, and Imagery has created new team shirts and robot designs. Soon we will be fully competition ready! Imagery has finalized the t-shirt logo, sketched the button design, organized the pit book, and formatted the awards. We will be introducing Rogue571, our robot, into the FIRST Infinite Recharge competition in March. We are currently working at finalizing the details of the robot visuals. Our Programming Team completed the drive function and the color sensor portion of the code. Now we continue brainstorming autonomous commands to ensure we have a successful strategy. Furthermore, we have broken ground on the code needed to make the climber and the conveyor belt. The Build Team has made great progress in constructing our robot. First, we have completely assembled the conveyor belt (ball scoring mechanism). Second, we have begun construction on the climbing mechanism to ensure the robot will successfully climb to earn points. Finally, the chassis on the robot now has the proper gear ratio and number of motors. The robot is approaching completion and will soon be competition ready. -Team Paragon Co-Captains: GABBY AND OM B.T.S. (Behind the Scenes) Upcoming Events Competitions: February 22nd - Team Blazing Spirits (sister team) hosts FIRST Tech Challenge -

New York City FIRST Mega Celebration March 16 to 18, 2012 - Jacob K
New York City FIRST Mega Celebration March 16 to 18, 2012 - Jacob K. Javits Convention Center FIRST Robotics Competition Friday March 16-Sunday March 18 9:00 a.m.-5:00 p.m. FIRST Tech Challenge Championship Friday March 16-Saturday March 17 9:00 a.m.-5:00 p.m. FIRST LEGO League Championship Sunday March 18 9:30 a.m.-3:30 p.m. Junior FIRST LEGO League Expo Sunday March 18 9:30 a.m.-1:00 p.m. NYC FIRST Science and Technology College/Career Expo Friday March 16, Noon-4 p.m. Saturday, March 17, 11:00 a.m to 3:00 p.m. Sunday, March 18, 10:00 a.m to 3:00 p.m. All Photographs By Adriana M. Groisman/FIRST Welcome to the 12th Annual New York City FIRST Robotics Competition! The New York City FIRST (For the Inspiration and Recognition of Science and Technology) Robotics Competition proudly welcomes you to the 2012 New York City Regional mega celebration and competition here at the Jacob Javits Convention Center. Our mission is to inspire young people to be science and technology leaders by engaging them in exciting mentor-based programs that build science, engineering and technology skills that inspire innovation, cooperation, and gracious professionalism! FIRST Robotics has been going strong for over 20 years worldwide and we celebrate our 12th year in New York City. NYC FIRST programs engage thousands of elementary, intermediate and high school students as they build robots and compete on the playing field while actively using science and technology. -

2020 Annual Impact Report
TOGE T HER, W E RISE 2020 ANNUAL IMPACT REPORT TABLE OF CONTENTS 3 6 16 22 36 40 Greetings from FIRST® City FIRST Longitudinal Impact Study FIRST® RISESM powered by FIRST® Robotics Competition Mission Support Sponsors Volunteers of the Year Star Wars: Force for Change: 4 8 A Season in Numbers 24 37 44 Season Highlights Start Progression of Programs 18 Woodie Flowers’ Legacy Gala Sponsors Financials 5 10 FIRST® LEGO® League 26 38 45 Leadership Letter FIRST Equity, Diversity & Inclusion F IRS T, Inspire Gala FIRST Scholarship Program Leadership Introducing Larry Cohen, 20 FIRST® Tech Challenge FIRST President 13 27 39 FIRST Community Stories Sponsors and Contributors Program Delivery Partners 2 2020 Annual Impact Report This Annual Impact Report covers the period of July 1, 2019, to June 30, 2020. This season of FIRST,® a global community of young people and forward-looking adults came together to build FIRST City, a place where we celebrate our differences and embrace innovative concepts and technology to strengthen our future cities. In our thriving culture, collaboration and collective wisdom elevate new ideas and foster growth. OUR COMMUNITY IS BRIMMING WITH INSPIRATION, CREATIVITY, AND – MOST IMPORTANTLY – HOPE. Through evidence-based robotics programs designed to ignite young minds and the incredible support of mentors, educators, volunteers, sponsors, donors, and alumni, we’re helping young people realize their power to find a sense of belonging, reach new heights, and build a better future. TOGETHER, WE RISE. 2020 Annual Impact Report 3 For the 2019-2020 FIRST® season, FIRST teamed up with Lucasfilm and parent company Disney for FIRST RISESM powered by Star Wars: Force for Change, setting out to inspire the next generation of heroes and innovators. -

FIRST® Championship in Houston, TX., April 19-22, 2017, and St
® FIRST FAQ ® What is FIRST ? ® FIRST (For Inspiration and Recognition of Science and Technology) was founded in 1989 by inventor Dean Kamen to inspire young people’s interest and participation in science and technology. Based in Manchester, N.H., the 501(c)(3) not-for-profit public charity inspires young people to be science and technology leaders, by engaging them in exciting Mentor-based programs that build science, technology, math, and engineering (STEM) skills, that inspire innovation, and that foster well- rounded life capabilities including self-confidence, communication, and leadership. ® FIRST provides a progression of four global, after-school programs for K-12: the FIRST Robotics ® Competition for Grades 9-12 (ages 14 to 18); the FIRST Tech Challenge for Grades 7-12 (ages 12 ® to 18); the FIRST LEGO League for Grades 4-8 (ages 9 to 16; ages vary by country); and the ® ® FIRST LEGO League Jr. for Grades K-4 (ages 6 to 10). FIRST also operates a research, ® development, and training facility called FIRST Place™ at its headquarters in New Hampshire. Who are some of the organizations that sponsor FIRST? FIRST is supported by a strong network of corporations, educational and professional institutions, and individuals. Some of the world’s most respected companies – including more than 200 of the Fortune 500 companies – provide funding, mentorship time and talent, volunteerism, equipment, and more to make FIRST a reality. 2016 FIRST Strategic Partners are: 3M Company, Argosy Foundation, BAE Systems, Bechtel Corporation, The Boeing -

FIRST in Michigan Robotics Progression of Programs
FIRST in Michigan Robotics Progression of Programs Build Robots. Build Leaders. Build Futures. STEM Robotics Competitions for Grades K–12 FIRST in Michigan Robotics Progression of Programs What is FIRST? For Inspiration and Recognition of Science and Technology • Dean Kamen, founded to change culture away from sports to to engineering (now STEM) • Fun filled, innovative progression of STEM programs that mimic sports • Purpose is to create passion for STEM careers FIRST in Michigan Robotics Progression of Programs What Makes FIRST Unique? • Partnership with Education, Industry, Government • Students working side by side with engineers and technicians • Only varsity sport where everyone on the team can turn “pro” • Over $25,000,000 in college scholarships: create passion, provide the resources to pursue FIRST in Michigan Robotics Progression of Programs http://youtu.be/i1QyM9WTF18 FIRST in Michigan Robotics Progression of Programs FIRST Programs in Michigan Goal of Michigan Progression: Engage them early, keep them engaged all the way through high school • FIRST Robotics Competition (FRC) High School High School • FIRST Tech Challenge (FTC) Middle School Middle school • FIRST LEGO League (FLL) Upper Elementary Upper elementary – (starting in 4th grade) • FIRST LEGO League Junior (Jr.FLL) Grades K-3 Early elementary (K-3) More than Robots • Gracious Professionalism • Outreach • Business FIRST in Michigan Robotics Progression of Programs HIGH SCHOOL- FIRST Robotics Competition (FRC) TIMELINE: January – April DESCRIPTION: 5 ft tall, 120 pound -

Administrators Guide to First Robotics Program Expenses
ADMINISTRATORS GUIDE TO FIRST ROBOTICS PROGRAM EXPENSES FIRST has 4 programs under the umbrella all foCused on inspiring more students to pursue Careers in sCienCe, teChnology, engineering, and mathematiCs. All of the programs use a robot Competition exCept the youngest group whiCh is for K-3 and it is more of a make-it/engineering expo. FIRST LEGO League Jr (FLL Jr) for students kindergarten through third grade is a researCh/design challenge and introduction to the engineering process. Kids go on a research journey, create a poster and LEGO model Present at Expo to reviewers and then all teams reCeive reCognition. Expos can be organized at the loCal level and a regional expo will be held in MarCh. Costs are: ($50 - $300 per season) • $25 FLL Jr program fees (annual dues) • $25 Expo registration fees • Teams Can use any LEGO, must have one moving part with a motor. FIRST does offer a large kit of parts for about $150 Registration: Never closes Register Here: http://www.usfirst.org/robotiCsprograms/jr.fll/registration Competitions/tournaments: Expo is held in the spring (RGV LoCal) FIRST Lego league (FLL) has a new game theme eaCh year, whiCh also inCludes a student Chosen project in which they researCh and purpose a solution that fits their Community’s needs. The Challenge is revealed in early September eaCh year and the Competition season is from November – MarCh. Team size is limited to 10 students. Robots can be used year over year; thus reduCing the annual investment. Costs are: ($1,500 - $2,100 first season, then $300 - $900 per season to sustain program) • $225 FLL program fees (annual dues) • $300 -$420 Lego Mindstorms robot kit (re-usable eaCh year) • $65 game field set-up kit (new eaCh year) • $70 - $90 tournament registration fees • $500 - $1,000 for team apparel, meals, presentation materials, promotional items for team spirit, etC. -
First Robotics Infinite Recharge
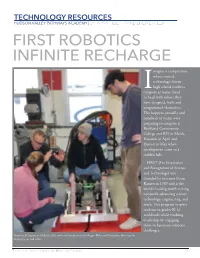
TECHNOLOGY RESOURCES HUDSON VALLEY PATHWAYS ACADEMY | BY HVPA STUDENTS AND LINDA ENGLER FIRST ROBOTICS INFINITE RECHARGE magine a competition where excited, technology-driven high school students competeI as teams, head to head with robots they have designed, built and programmed themselves. This happens annually and hundreds of teams were preparing to compete at Rockland Community College and RPI in March, Houston in April and Detroit in May when development came to a sudden halt. FIRST (For Inspiration and Recognition of Science and Technology) was founded by inventor Dean Kamen in 1989 and is the world’s leading youth serving nonprofit advancing science, technology, engineering, and math. This program inspires students in grades K-12 worldwide while teaching leadership by engaging them in hands-on robotics challenges. Teachers Bill Lopez and Matt Leifeld work with young scholars Regan Miller and Dartanian Barringer to strategize on ball intake. The Council of Industry Magazine and Membership Directory 25 FIRST LEGO League Jr. is for grade K-4, FIRST LEGO FIRST Robotics is a program that builds student creativity, League is Grades 4-8, and FIRST Tech Challenge covers grades innovation, and critical thinking. The goal of FIRST is to build 7-12, while the FIRST Robotics Competition is grade 9-12. and design a robot that’s able to perform multiple unique tasks and then put your teams’ skills to the test in competitions that take place around the country. This year the theme of First Robotics is Star Wars, Infinite Recharge. The main goal for the robot in this competition is to shoot and score “Power Cells” (foam balls) to energize a Shield Generator to protect the team. -

Official Program
OFFICIAL PROGRAM JUNE 14 -17, 2021 FRC Schedule FTC Schedule Monday, June 14, 2021 Monday, June 14, 2021 5:00pm - 10:00pm: Team Load-In – Enter SE Ramp in 3:00pm-5:00pm: Team Load-in for UIL both divisions Lower Dock, Registration & Pits Open 3:00pm-8:00pm: Team Check-In, Pits Open, Inspections, 5:00pm - 10:00pm: Practice Field Open, Inspection Practice Fields open Starts 8:15pm: Practice Fields Close 5:00pm - 10:00pm: Robot Connection Tests, Field Open for Calibration and Measurement 8:30pm: Pits Close 9:45pm: Practice Field Closes Tuesday, June 15, 2021 10:00pm: Pits Close 7:30am: Team Check-In / Pits Open Tuesday, June 15, 2021 9:00am-11:30am: Opening Ceremonies (Pre-Recorded) 7:30am: Team Check-In – Enter SE Ramp in Lower Dock, Match play begins Pits Open 11:30am-12:30pm: Lunch Longhorn Division UIL 1A-4A 8:00am - 11:30am: Practice Matches, Practice Field 12:00pm-1:00pm: Lunch Armadillo Division UIL 5A-6A Open 12:30pm - 1:00pm: Match Play resumes 11:30am - 1:00pm: Team Lunch for Lone Star/Bluebonnet Fields Continues 2:00pm - 3:15pm: Alliance Pairing ® 2:45pm - 4:00pm: Elimination Matches followed by 12:40pm - 1:00pm: Open Ceremonies (pre-recorded) Welcome About FIRST Awards Ceremonies Welcome to the FIRST® in Texas UIL/State Championship – FIRST® is a robotics community that prepares young people prior to Qualification Matches 5:00pm - 5:30pm: Load-Out UIL. // Load in State Texas Cup Event. Like you, we are excited to see the robots for the future. The world’s leading youth-serving nonprofit 1:00pm - 6:00pm: Qualification Matches Continues for ® ® Championship Teams. -

Tournament Director Guide
® SM FIRST RISE powered by Star Wars: Force for Change 2019-2020 FIRST ® Tech Challenge Tournament Director Guide 2 | FIRST® Tech Challenge Tournament Director Guide Sponsor Thank You Thank you to our generous sponsors for your continued support of the FIRST® Tech Challenge! Revision 1: 07.2019 FIRST® Tech Challenge Tournament Director Guide | 3 Volunteer Thank You Thank you for taking the time to volunteer for a FIRST® Tech Challenge event. FIRST® and FIRST® Tech Challenge rely heavily on volunteers to ensure events run smoothly and are a fun experience for teams and their families, which could not happen without people like you. With over 5,500 teams competing yearly, your dedication and commitment are essential to the success of each event and the FIRST Tech Challenge program. Thank you for your time and effort in supporting the mission of FIRST! Revision History Revision Date Description 1 07/02/2019 Initial Release Contents Contents ............................................................................................................................................................ 3 Introduction ........................................................................................................................................................ 7 ® What is FIRST Tech Challenge? .................................................................................................................. 7 ® Gracious Professionalism ............................................................................................................................... -

Plano District Event First Robotics Competition …………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………
PLANO DISTRICT EVENT FIRST ROBOTICS COMPETITION ………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………….. March 6 – 8, 2020 | Plano Senior High School WELCOME SCHEDULE Prepare to protect FIRST City from an approaching FRIDAY MARCH 6 asteroid strike at our FIRST in Texas Plano District 5:00 PM Team Load-In Event! 30 Texas teams will compete in INFINITE Inspections RECHARGE as they strive to win a blue banner and earn 10:00 PM Pits Close a spot at our District Championship event in San SATURDAY MARCH 7 SUNDAY MARCH 8 Antonio! Thank you for your generous gift of time and 8:00 AM Doors Open 8:00 AM Doors Open guidance to the youth of today who are destined to be Inspections 9:00 AM Opening Ceremonies the leaders of tomorrow. This event would not be 8:45 AM Practice Rounds 9:30 AM Qualification Matches possible without the support from sponsors, mentors, 10:30 AM Opening Ceremonies 11:30 AM Alliance Selections coaches, volunteers, teachers and parents! 11:00 AM Qualification Matches 12:00 PM Lunch 12:00 PM Lunch 1:00 PM Playoff Matches Rachel Moore 1:00 PM Qualification Matches 4:15 PM Awards Ceremony North Area Program Delivery Partner 8:00 PM Pits Close 5:30 PM Pits Close FIRST in Texas TEAMS TEAM # TEAM NAME SCHOOL/ORGANIZATION TEAM # TEAM NAME SCHOOL/ORGANIZATION 118 Robonauts Clear Creek H S 6655 Texas Robotics Sam Houston H S 148 Robowranglers Greenville H S 6672 Fusion Corps Cistercian Preparatory School 1745 The P-51 Mustangs Pearce H S 6751 RoboFlash Sunset H S 3282 Dallas Robo -
Game Manual Part 1 Remote Events
FIRST® GAME CHANGERSSM powered by Star Wars: Force for Change 2020-2021 FIRST ® Tech Challenge Game Manual Part 1 Remote Events FIRST® Tech Challenge Game Manual Part 1 – Remote Events | 2 Sponsor Thank You Thank you to our generous sponsors for your continued support of the FIRST® Tech Challenge! Sponsors Revision 1: 7/16/2020 FIRST® Tech Challenge Game Manual Part 1 – Remote Events | 3 Revision History Revision Date Description 1 7/16/2020 Initial Release Contents Contents ............................................................................................................................................................ 3 1.0 Introduction .................................................................................................................................................. 5 1.1 What is FIRST® Tech Challenge? ............................................................................................................ 5 1.2 FIRST Core Values .................................................................................................................................. 5 2.0 Gracious Professionalism® .......................................................................................................................... 5 3.0 The Competition – Definitions and Rules ..................................................................................................... 6 3.1 Overview .................................................................................................................................................