A Novel Robust Mel-Energy Based Voice Activity Detector for Nonstationary Noise and Its Application for Speech Waveform Compression Syed, Q
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Media Gateway Mediant 8000™ Product Description Version
™ Media Gateway Mediant 8000™ Product Description Version 6.6 Document # LTRT-92323 Product Description Contents Contents 1 Introduction ....................................................................................................... 15 1.1 General Features ..................................................................................... 15 1.2 PSTN Signaling Features ........................................................................ 16 1.3 3GPP Functionality .................................................................................. 16 1.4 Cable Functionality (PacketCable 1.0) ................................................... 17 1.5 System Management Functionality ........................................................ 17 1.6 Hardware Platform Functionality ........................................................... 18 1.7 Performance Highlights .......................................................................... 19 2 Mediant 8000 Basic Feature Highlights ........................................................... 21 2.1 Voice Packet Processing ........................................................................ 21 2.1.1 Echo Cancelation ................................................................................... 21 2.1.2 Voice and Tone Signaling Discrimination ............................................... 22 2.1.3 Capacity and Voice Compression ........................................................... 22 2.1.4 Voice Activity Detection and Comfort Noise Generation ........................ -
Comparison of Voice Activity Detection Algorithms for Wireless
Proc. IEEE Canadian Conf. Electrical, Computer Engineering (St. John’s, NF), pp. 470-473, May 1997 COMPARISON OF VOICE ACTIVITY DETECTION ALGORITHMS FOR WIRELESS PERSONAL COMMUNICATIONS SYSTEMSy Khaled El-Maleh and Peter Kabal TSP Lab oratory, Dept. of Electrical Eng. McGill University Montreal, Queb ec, Canada H3A 2A7 email: fkhaled,[email protected] ABSTRACT (VBR) co ding has b een recently adopted for CDMA- based cellular and PCS systems to enhance capacity V oice activity detection (VAD) algorithms havebe- b y reducing interference. A V AD device is an indis- come an in tegral part of many of the recently stan- p ensable part of any VBR co dec as it controls b oth the dardized wireless cellular and P ersonal Communica- a verage bit rate, and the o v erall qualit y of the co der tions Systems (PCS). In this pap er, we presentacom- [3]. parative study of the p erformance of three recently pro- This pap er is organized in ve parts. Section 2 posed VAD algorithms under various acoustical back- starts with a general review of the basics of a V AD ground noise conditions. We also prop ose new ideas to design. It then describ es, in some detail, three selected enhance the p erformance of a VAD algorithm in wire- V AD designs for the this study. Section 3 rep orts the less PCS sp eech applications. results of a simulation study that has b een p erformed to study the p erformance of the three VADs under var- 1. INTRODUCTION ious background noise conditions. -

The Sound of Silence: How Traditional and Deep Learning Based Voice Activity Detection Influences Speech Quality Monitoring
The sound of silence: how traditional and deep learning based voice activity detection influences speech quality monitoring Rahul Jaiswal, Andrew Hines School of Computer Science, University College Dublin, Ireland [email protected], [email protected] Abstract. Real-time speech quality assessment is important for VoIP applications such as Google Hangouts, Microsoft Skype, and Apple Face- Time. Conventionally, subjective listening tests are used to quantify speech quality but are impractical for real-time monitoring scenarios. Objective speech quality assessment metrics can predict human judge- ment of perceived speech quality. Originally designed for narrow-band telephony applications, ITU-T P.563 is a single-ended or non-intrusive speech quality assessment that predicts speech quality without access to a reference signal. This paper investigates the suitability of P.563 in Voice over Internet Protocol (VoIP) scenarios and specifically the influ- ence of silences on the predicted speech quality. The performance of P.563 was evaluated using TCD-VoIP dataset, containing speech with degra- dations commonly experienced with VoIP. The predictive capability of P.563 was established by comparing with subjective listening test results. The effect of pre-processing the signal to remove silences using Voice Activity Detection (VAD) was evaluated for five acoustic feature-based VAD algorithms: energy, energy and spectral centroid, Mahalanobis dis- tance, weighted energy, weighted spectral centroid and four Deep learning model-based VAD algorithms: Deep Neural Network, Boosted Deep Neu- ral Network, Long Short-Term Memory and Adaptive context attention model. Analysis shows P.563 prediction accuracy improves for different speech conditions of VoIP when the silences were removed by a VAD. -
Design and Implementation on DSP of the ETSI GSM Adaptive Multi-Rate Vocoder
Design and Implementation on DSP of the ETSI GSM Adaptive Multi-Rate Vocoder by Javier Martínez Morales Supervisor: Joan Serrat Fernández Contents Chapter 1 - Introduction...................................................................................................................................5 1.1 Foreword..................................................................................................................................................5 1.2 Project objectives and methodology........................................................................................................6 1.3 Memory structure.....................................................................................................................................8 Chapter 2 - GSM Adaptive Multi-Rate Vocoder..........................................................................................10 2.1 Origins and present situation..................................................................................................................10 2.2 Adaptive Multi-Rate (AMR) coding: general description.....................................................................11 2.3 GSM AMR speech encoder...................................................................................................................13 2.3.1 Principles.......................................................................................................................................13 2.3.2 Pre-processing...............................................................................................................................18 -

Efficient Voice Activity Detection Algorithms Using Long-Term Speech
Speech Communication 42 (2004) 271–287 www.elsevier.com/locate/specom Efficient voice activity detection algorithms using long-term speech information Javier Ramırez *, Jose C. Segura 1, Carmen Benıtez, Angel de la Torre, Antonio Rubio 2 Dpto. Electronica y Tecnologıa de Computadores, Universidad de Granada, Campus Universitario Fuentenueva, 18071 Granada, Spain Received 5 May 2003; received in revised form 8 October 2003; accepted 8 October 2003 Abstract Currently, there are technology barriers inhibiting speech processing systems working under extreme noisy condi- tions. The emerging applications of speech technology, especially in the fields of wireless communications, digital hearing aids or speech recognition, are examples of such systems and often require a noise reduction technique operating in combination with a precise voice activity detector (VAD). This paper presents a new VAD algorithm for improving speech detection robustness in noisy environments and the performance of speech recognition systems. The algorithm measures the long-term spectral divergence (LTSD) between speech and noise and formulates the speech/ non-speech decision rule by comparing the long-term spectral envelope to the average noise spectrum, thus yielding a high discriminating decision rule and minimizing the average number of decision errors. The decision threshold is adapted to the measured noise energy while a controlled hang-over is activated only when the observed signal-to-noise ratio is low. It is shown by conducting an analysis of the speech/non-speech LTSD distributions that using long-term information about speech signals is beneficial for VAD. The proposed algorithm is compared to the most commonly used VADs in the field, in terms of speech/non-speech discrimination and in terms of recognition performance when the VAD is used for an automatic speech recognition system. -
AMR Speech Codec, Wideband; General Description (3GPP TS 26.171 Version 5.0.0 Release 5)
ETSI TS 126 171 V5.0.0 (2001-03) Technical Specification Universal Mobile Telecommunications System (UMTS); AMR speech codec, wideband; General description (3GPP TS 26.171 version 5.0.0 Release 5) 3 GPP TS 26.171 version 5.0.0 Release 5 1 ETSI TS 126 171 V5.0.0 (2001-03) Reference DTS/TSGS-0426171v500 Keywords UMTS ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice Individual copies of the present document can be downloaded from: http://www.etsi.org The present document may be made available in more than one electronic version or in print. In any case of existing or perceived difference in contents between such versions, the reference version is the Portable Document Format (PDF). In case of dispute, the reference shall be the printing on ETSI printers of the PDF version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://portal.etsi.org/tb/status/status.asp If you find errors in the present document, send your comment to: [email protected] Copyright Notification No part may be reproduced except as authorized by written permission. The copyright and the foregoing restriction extend to reproduction in all media. -
Voice Activity Detection in Non-Stationary Noise
Voice Activity Detection in Non-stationary Noise. Sunil Srinivasa Department of Electrical Engineering, IIT Madras A Summer Project under the guidance of Dr. N. Rama Murthy Scientist ‘E’, CAIR Objectives of the project. Learning various methods for VAD proposed in literature. Implementation of several VAD algorithms by using MATLAB™ – successful detection of start and end points in the noisy speech signal. Comparison of VAD algorithms – search for the best VAD algorithm. Study of some Speech Enhancing methods. Software coding of the techniques learnt to enhance speech. Introduction to VAD. What is VAD ? VAD stands for VOICE ACTIVITY DETECTOR. It carries out the process of distinguishing between conversational speech and silence(noise) i.e. It detects the beginning and ending of talk spurts. A VAD makes use of a set of rules incorporated in the Voice Activity Detection Algorithms. Advantages of VAD. Saves the processing time in canceling noise from speech. Helps to reduce Internet Traffic. Achieves Band Width reduction, as high- frequency noisy frames are discarded. Allows for multi-data transmission. Causes silence compression – very important for both fixed and mobile telecommunication systems. Few Applications of VAD. Required in some communication applications like : Speech Recognition Speech Coding Hands-Free Telephony Echo Cancellation. It is also required in Voice over IP systems for providing Toll Grade Voice Quality. It is an integral part of Transmission systems. Desirable aspects of VAD Algorithms. A good decision rule even at low SNR. Adaptability to non-stationary background noise. Low computational complexity. Toll Quality Voice Reproduction – very important for Voice over Packet Networks. Maximum saving in Band Width. -

AN4229 How to Implement a Vocoder Solution Using
AN4229 Application note How to implement a vocoder solution using STM32 microcontrollers Introduction This application note describes the vocal codecs (vocoder) available for STM32 32-bit ARM® Cortex® microcontrollers. The supported codecs are G.711, G.726, IMA-ADPCM and Speex. It comes with examples of implementation on STM32F4DISCOVERY (referred as DISCOVERY board hereafter), STM322xG-EVAL and STM324xG-EVAL (referred as EVAL boards hereafter). These examples are developed in such a way that they can be easily ported to any other STM32 microcontroller and board. The vocoder firmware package is provided upon request, for more details please contact your local ST sales representative. Table 1. Applicable products Type Applicable products Microcontrollers STM32 32-bit ARM Cortex MCU May 2014 DocID024112 Rev 1 1/26 www.st.com Contents AN4229 Contents 1 Vocoder overview and comparison . 5 1.1 G.711 . 5 1.2 G.726 . 5 1.3 IMA-ADPCM . 6 1.4 Speex . 6 1.5 Vocoder comparison . 7 1.6 Vocoder performance . 8 2 Package content and description . 10 2.1 Firmware description . 10 2.2 Audio API description . 13 2.3 Player and recorder processes . 15 2.3.1 Audio player . 15 2.3.2 Audio recorder . 16 2.4 Software . 16 3 How to use the demonstration . 17 3.1 Hardware configuration . 17 3.2 Firmware configuration . 17 3.3 Main application steps . 18 3.3.1 Player menu . 19 3.3.2 Recording format menu . 20 3.3.3 Recorder menu . 21 3.4 Simple examples . 21 4 Memory footprint . 22 5 FAQ . 23 6 References . -
Voip Gateway Solutions
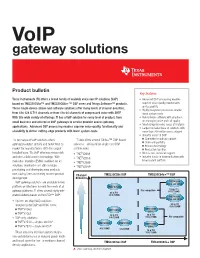
VoIP gateway solutions Product bulletin Key features Texas Instruments (TI) offers a broad family of scalable voice over IP solutions (VoIP) • Advanced DSP processing enables based on TMS320C55x™ and TMS320C64x+™ DSP cores and Telogy Software™ products. superior voice quality, functionality and scalability These single-device silicon and software solutions offer many levels of channel densities, • Highly integrated processors enable from 4 to 128 G.711 channels or from 4 to 64 channels of compressed voice with SRTP. lower system costs With this wide variety of offerings, TI has a VoIP solution for every level of product, from • Field-proven software with emphasis small business and enterprise VoIP gateways to service provider access gateway on managing voice and call quality • Most comprehensive range of features applications. Advanced DSP processing enables superior voice quality, functionality and • Largest installed base of solutions with scalability to deliver cutting-edge products with lower system costs. more than 700 million ports shipped • Industry leader in DSP TI’s full range of VoIP solutions offers TI also offers several C64x+™ DSP-based • Committed roadmap support • Code compatibility optimized solution density and faster time to solutions – all based on single-core DSP • Process technology market for manufacturers. With the largest architectures: • Production facilities installed base, TI’s VoIP offerings reduce risk • TNETV2664 • World-class technical support and offer a field-proven technology. With • TNETV2666 • Industry leader in indemnification with broad patent portfolio evaluation modules (EVMs) available for all • TNETV2686 solutions, developers are able to begin • TNETV2689 prototyping and developing new products now, saving time and money on new product Channel TMS320C55x DSP TMS320C64x+™ DSP development. -

A Simple but Efficient Real-Time Voice Activity Detection Algorithm
17th European Signal Processing Conference (EUSIPCO 2009) Glasgow, Scotland, August 24-28, 2009 A SIMPLE BUT EFFICIENT REAL-TIME VOICE ACTIVITY DETECTION ALGORITHM M. H. Moattar and M. M. Homayounpour Laboratory for Intelligent Sound and Speech Processing (LISSP), Computer Engineering and Information Technology Dept., Amirkabir University of Technology, Tehran, Iran phone: +(0098) 2164542722, email: {moattar, homayoun}@aut.ac.ir ABSTRACT Among all features, the short-term energy and zero-crossing Voice Activity Detection (VAD) is a very important front end rate have been widely used because of their simplicity. processing in all Speech and Audio processing applications. However, they easily degrade by environmental noise. To The performance of most if not all speech/audio processing cope with this problem, various kinds of robust acoustic methods is crucially dependent on the performance of Voice features, such as autocorrelation function based features [3, Activity Detection. An ideal voice activity detector needs to 4], spectrum based features [5], the power in the band- be independent from application area and noise condition limited region [1, 6, 7], Mel-frequency cepstral coefficients and have the least parameter tuning in real applications. In [4], delta line spectral frequencies [6], and features based on this paper a nearly ideal VAD algorithm is proposed which higher order statistics [8] have been proposed for VAD. Ex- is both easy-to-implement and noise robust, comparing to periments show that using multiple features leads to more some previous methods. The proposed method uses short- robustness against different environments, while maintain- term features such as Spectral Flatness (SF) and Short-term ing complexity and effectiveness. -
Audiocodes Voip Processors (Chips) Solutions Guide Datasheets
AudioCodes VoIP Processor Solution Guide The Clear Sound of Quality Featuring Rich VoIP Processor Solutions from the world’s leading enabler of the new voice infrastructure AudioCodes Enabling Technology Products Solution Guide Application Solution VoIP Processor Number of Number of Product Description Remarks Page Product Number VoIP Channels Data Ports AC494 AC494 Hardware & Software Reference IP Phone solution IP Phone AC495 2 2 Design, Linux support, IP Phone 4 - 5 available VoIP Toolkit AC495L SIP demo application AC494E Hardware & Software Reference (Orchid) AC494E Design Gigabit Eth support, IP Phone solution IP Phone 2 2 10 - 11 IP Phone AC495E Linux support, IP Phone SIP available Toolkit demo application Hardware & Software Reference ATA/CPE AC494 Design, Linux support, ATA Gateway AC495 Up to 8 2 6 - 7 SIP demo application, FXS/FXO VoIP Toolkit AC496 support Production ready module, AC494 Optional production files available, Tulip ATA AC495 Up to 8 2 customization 7 Complete ATA SIP application, AC496 of the software FXS/FX0 support Hardware & Software Reference CPE Design, Linux support, ATA SIP AC483 Up to 4 - 14 VoIP Toolkit demo application, FXS/FXO support and CPE VoIP Gateway and CPE VoIP AC48x API Drivers AC48x Up to 4 - 13 VoIP DSP OS independent Analog Telephone Adapter (ATA) (ATA) Adapter Analog Telephone SMB VoIP Hardware & Software Reference Toolkit - AC494E + Design, Linux support, 16 port 4 - 16 2 Scalable solution 8 - 9 Gateway AC498 Gateway SIP demo application, FXS support Risk Free Asterisk AC494E + based IP- -

ETSI TR 101 329-6 V1.1.1 (2000-07) Technical Report
ETSI TR 101 329-6 V1.1.1 (2000-07) Technical Report Telecommunications and Internet Protocol Harmonization Over Networks (TIPHON); End to End Quality of Service in TIPHON Systems; Part 6: Actual measurements of network and terminal characteristics and performance parameters in TIPHON networks and their influence on voice quality 2 ETSI TR 101 329-6 V1.1.1 (2000-07) Reference DTR/TIPHON-05004 Keywords IP, network, performance, quality, terminal, voice ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.:+33492944200 Fax:+33493654716 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice Individual copies of the present document can be downloaded from: http://www.etsi.org The present document may be made available in more than one electronic version or in print. In any case of existing or perceived difference in contents between such versions, the reference version is the Portable Document Format (PDF). In case of dispute, the reference shall be the printing on ETSI printers of the PDF version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://www.etsi.org/tb/status/ If you find errors in the present document, send your comment to: [email protected] Copyright Notification No part may be reproduced except as authorized by written permission.