MIDI Optical Path Differences and Phases
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

COORDINATES, TIME, and the SKY John Thorstensen
COORDINATES, TIME, AND THE SKY John Thorstensen Department of Physics and Astronomy Dartmouth College, Hanover, NH 03755 This subject is fundamental to anyone who looks at the heavens; it is aesthetically and mathematically beautiful, and rich in history. Yet I'm not aware of any text which treats time and the sky at a level appropriate for the audience I meet in the more technical introductory astronomy course. The treatments I've seen either tend to be very lengthy and quite technical, as in the classic texts on `spherical astronomy', or overly simplified. The aim of this brief monograph is to explain these topics in a manner which takes advantage of the mathematics accessible to a college freshman with a good background in science and math. This math, with a few well-chosen extensions, makes it possible to discuss these topics with a good degree of precision and rigor. Students at this level who study this text carefully, work examples, and think about the issues involved can expect to master the subject at a useful level. While the mathematics used here are not particularly advanced, I caution that the geometry is not always trivial to visualize, and the definitions do require some careful thought even for more advanced students. Coordinate Systems for Direction Think for the moment of the problem of describing the direction of a star in the sky. Any star is so far away that, no matter where on earth you view it from, it appears to be in almost exactly the same direction. This is not necessarily the case for an object in the solar system; the moon, for instance, is only 60 earth radii away, so its direction can vary by more than a degree as seen from different points on earth. -

Arxiv:Astro-Ph/0608273 V1 13 Aug 2006 Ln Oteotclpt Ea Ocuetemanuscript the Conclude IV
CORE Metadata, citation and similar papers at core.ac.uk Provided by CERN Document Server Spherical Trigonometry of the Projected Baseline Angle Richard J. Mathar∗ Leiden Observatory, P.O. Box 9513, 2300 RA Leiden, The Netherlands (Dated: August 15, 2006) The basic geometry of a stellar interferometer with two telescopes consists of a baseline vector and a direction to a star. Two derived vectors are the delay vector, and the projected baseline vector in the plane of the wavefronts of the stellar light. The manuscript deals with the trigonometry of projecting the baseline further outwards onto the celestial sphere. The position angle of the projected baseline is defined, measured in a plane tangential to the celestial sphere, tangent point at the position of the star. This angle represents two orthogonal directions on the sky, differential star positions which are aligned with or orthogonal to the gradient of the delay recorded in the u−v plane. The North Celestial Pole is chosen as the reference direction of the projected baseline angle, adapted to the common definition of the “parallactic” angle. PACS numbers: 95.10.Jk, 95.75.Kk Keywords: projected baseline; parallactic angle; position angle; celestial sphere; spherical astronomy; stellar interferometer I. SCOPE II. SITE GEOMETRY A. Telescope Positions The paper describes a standard to define the plane that 1. Spherical Approximation contains the baseline of a stellar interferometer and the star, and its intersection with the Celestial Sphere. This In a geocentric coordinate system, the Cartesian coor- intersection is a great circle, and its section between the dinates of the two telescopes of a stellar interferometer star and the point where the stretched baseline meets the are related to the geographic longitude λi, latitude Φi Celestial Sphere defines an oriented projected baseline. -

Instrument Manual
MODS Instrument Manual Document Number: OSU-MODS-2011-003 Version: 1.2.4 Date: 2012 February 7 Prepared by: R.W. Pogge, The Ohio State University MODS Instrument Manual Distribution List Recipient Institution/Company Number of Copies Richard Pogge The Ohio State University 1 (file) Chris Kochanek The Ohio State University 1 (PDF) Mark Wagner LBTO 1 (PDF) Dave Thompson LBTO 1 (PDF) Olga Kuhn LBTO 1 (PDF) Document Change Record Version Date Changes Remarks 0.1 2011-09-01 Outline and block draft 1.0 2011-12 Too many to count... First release for comments 1.1 2012-01 Numerous comments… First-round comments 1.2 2012-02-07 LBTO comments First Partner Release 2 MODS Instrument Manual OSU-MODS-2011-003 Version 1.2 Contents 1 Introduction .................................................................................................................. 6 1.1 Scope .......................................................................................................................... 6 1.2 Citing and Acknowledging MODS ............................................................................ 6 1.3 Online Materials ......................................................................................................... 6 1.4 Acronyms and Abbreviations ..................................................................................... 7 2 Instrument Characteristics .......................................................................................... 8 2.1 Instrument Configurations ....................................................................................... -
II: "Representations of Celestial Coordinates in FITS"
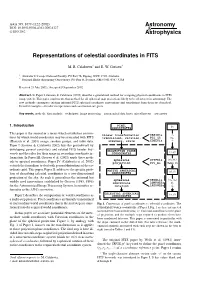
A&A 395, 1077–1122 (2002) Astronomy DOI: 10.1051/0004-6361:20021327 & c ESO 2002 Astrophysics Representations of celestial coordinates in FITS M. R. Calabretta1 and E. W. Greisen2 1 Australia Telescope National Facility, PO Box 76, Epping, NSW 1710, Australia 2 National Radio Astronomy Observatory, PO Box O, Socorro, NM 87801-0387, USA Received 24 July 2002 / Accepted 9 September 2002 Abstract. In Paper I, Greisen & Calabretta (2002) describe a generalized method for assigning physical coordinates to FITS image pixels. This paper implements this method for all spherical map projections likely to be of interest in astronomy. The new methods encompass existing informal FITS spherical coordinate conventions and translations from them are described. Detailed examples of header interpretation and construction are given. Key words. methods: data analysis – techniques: image processing – astronomical data bases: miscellaneous – astrometry 1. Introduction PIXEL p COORDINATES j This paper is the second in a series which establishes conven- linear transformation: CRPIXja r j tions by which world coordinates may be associated with FITS translation, rotation, PCi_ja mij (Hanisch et al. 2001) image, random groups, and table data. skewness, scale CDELTia si Paper I (Greisen & Calabretta 2002) lays the groundwork by developing general constructs and related FITS header key- PROJECTION PLANE x words and the rules for their usage in recording coordinate in- COORDINATES ( ,y) formation. In Paper III, Greisen et al. (2002) apply these meth- spherical CTYPEia (φ0,θ0) ods to spectral coordinates. Paper IV (Calabretta et al. 2002) projection PVi_ma Table 13 extends the formalism to deal with general distortions of the co- ordinate grid. -

19690018939.Pdf
General Disclaimer One or more of the Following Statements may affect this Document This document has been reproduced from the best copy furnished by the organizational source. It is being released in the interest of making available as much information as possible. This document may contain data, which exceeds the sheet parameters. It was furnished in this condition by the organizational source and is the best copy available. This document may contain tone-on-tone or color graphs, charts and/or pictures, which have been reproduced in black and white. This document is paginated as submitted by the original source. Portions of this document are not fully legible due to the historical nature of some of the material. However, it is the best reproduction available from the original submission. Produced by the NASA Center for Aerospace Information (CASI) SELENOCENTRIC AND LUNAR TOPOCENTRIC SPHERICAL COORDINATES B. KOLACZEK 6 LACCESS, M NUMD)RI 0 WApas) 'COD[" 'A ," (NA • CRORTMXORADNUMMER) 3 ICATWOOFty) 4 4N, Ai V14. 0 Smithsonian Astrophysical Observatory SPECIAL REPORT 286 1 Research in Space Sciei.ce SAO Special Report No. 286 r SELENOCENTRIC AND LUNAR TOPOCENTRIC COORDINATES OF DIFFERENT SPHERICAL SYSTEMS B. Kolaczek September 20, 1968 Smithsonian Institution Astrophysical Observatory Cambridge, Massachusetts 02138 PRECEDING PAGE BLANK NOT FIL WO, TABLE OF CONTENTS Section Pale ABSTRACT ............................... vii 1 INTRODUCTION ............................ 1 2 SELENOEQUATORIA& COORDINATE SYSTEM ....... 5 2.1 Definition; Transformation of Mean Geoequatorial into Mean Selenoequatorial Coordinates ....... 5 2.2 Transformation of Geo-apparent Geoequatorial into Seleno-apparent Selenoequatorial Coordinates ... 10 2.3 Calculation of the Mean Selenoequatorial Coordinates .... .. ... .... .. .. .... .. 12 2.4 Transformation of Mean into Seleno-apparent Selenoequatorial Coordinates . -

Positional Astronomy
Positional Astronomy by Fiona Vincent Fiona Vincent Positional Astronomy A Collection of Lectures on Positional Astronomy for an undergraduate course at the. University of St. Andrews. Scotland in 1998 Positional Astronomy By Fiona Vincent Copyright : Fiona Vincent 1998. Revised and updated on 2003. Converted to .pdf by Alfonso Pastor on 2005 and revised on 2015 1 Copyright : Fiona Vincent 1998 Comments, complaints or queries? Please e-mail: Fiona Vincent at : [email protected] For a short Professional Curriculum of Fiona Vincent see the last page of this eBook Originally created by Fiona Vincent on March 1998. Revised and updated November 2003. Adapted to .pdf format by Alfonso Pastor on 2005. And revised on January 2015 Note: On the .pdf version, in the Chapter’s Index as well as in the references to other sources, the links to the original pages are active. Clicking on the links, in some .pdf readers with Internet connection, the original pages can be accessed whatever the University of St. Andrews keep them active and stored in their resources. If any flaw in the text of the pdf version is suspected, the original page can be accessed to compare it with the .pdf version. Some words in the original Fiona Vincent’s text are not recognized by the dictionaries of the modern Word-processors as the word “centre” , which was widely used in old English writings, is nowadays being replaced by the “Americanism” term “center” , but it has been conserved as in the original text in aims to be respectful with Fiona Vincent’s writing. -

The Apparent Diurnal Motions
CHAPTER 7 The Apparent Diurnal Motions 1 HE immediately observed aspect of the celestial sphere is distinguished by its characteristic dependence on geographic location and its rapid variation due to the diurnal motions of the celestial bodies. At any instant, the geometric directions of the bodies from the center of the Earth, and the angular displacements from these directions caused by aberration, parallax, and refraction determine the directly observed positions on the celestial sphere. The coordinates of these positions, in terms of which the local aspect of the sphere is represented by means of the relations in Chapter 3, depend upon the positions of the reference circles on the sphere at the time. The reference circles are not displaced by parallax, and are independent of aberration and refraction; but the equator and the ecliptic slowly vary their positions on the sphere because of precession and nutation, while the circles of the horizon system are in rapid motion because of the rotation of the Earth. The apparent motions of the celestial bodies are principally due to the apparent diurnal rotation of the celestial sphere. In the case of the Sun, Moon, and planets, however, an appreciable part of the apparent motion is the result of the actual motion of the body in space relative to the Earth. Furthermore, the observed diurnal motions are affected by the variations which take place in the departure of the apparent position from the geometric position during the diurnal circuit. The apparent diurnal motions of the celestial bodies are each the resultant of (a) the apparent geometric rotation of the celestial sphere, (b) whatever proper motion on the sphere the individual body may have, and (c) the continually changing apparent displacement due to atmospheric refraction, diurnal aberration, and in the case of nearby objects, especially the Moon, geocentric parallax because of the changing position of the observer in space during the rotational circuit. -
Standards of Fundamental Astronomy; SOFA Astrometry Tools
International Astronomical Union Standards Of Fundamental Astronomy SOFA Astrometry Tools Software version 18 Document revision 1.11 Version for Fortran programming language http://www.iausofa.org 2021 April 19 MEMBERS OF THE IAU SOFA BOARD (2021) John Bangert United States Naval Observatory (retired) Steven Bell Her Majesty’s Nautical Almanac Office Nicole Capitaine Paris Observatory Maria Davis United States Naval Observatory (IERS) Micka¨el Gastineau Paris Observatory, IMCCE Catherine Hohenkerk Her Majesty’s Nautical Almanac Office (chair, retired) Li Jinling Shanghai Astronomical Observatory Zinovy Malkin Pulkovo Observatory, St Petersburg Jeffrey Percival University of Wisconsin Wendy Puatua United States Naval Observatory Scott Ransom National Radio Astronomy Observatory Nick Stamatakos United States Naval Observatory Patrick Wallace RAL Space (retired) Toni Wilmot Her Majesty’s Nautical Almanac Office (trainee) Past Members Wim Brouw University of Groningen Mark Calabretta Australia Telescope National Facility William Folkner Jet Propulsion Laboratory Anne-Marie Gontier Paris Observatory George Hobbs Australia Telescope National Facility George Kaplan United States Naval Observatory Brian Luzum United States Naval Observatory Dennis McCarthy United States Naval Observatory Skip Newhall Jet Propulsion Laboratory Jin Wen-Jing Shanghai Observatory © Copyright 2013-21 International Astronomical Union. All Rights Reserved. Reproduction, adaptation, or translation without prior written permission is prohibited, except as al- lowed under the -
Introduction to Spherical Astronomy TCAA Guide #10 Carl J
Introduction to Spherical Astronomy TCAA Guide #10 Carl J. Wenning Introduction to Spherical Astronomy Copyright © 2020 Twin City Amateur Astronomers All Rights Reserved 1 Introduction to Spherical Astronomy TCAA Guide #10 VERSION 1.3.2 NOVEMBER 26, 2020 ABOUT THIS GUIDE: This TCAA Guide #10 – Introduction to Spherical Astronomy – is the tenth TCAA guide written for amateur astronomers. It was started as a book chapter in the early 1990s and didn’t Come to fruition until 2020 as part of the COVID-19 pandemiC when the author had plenty of time on his hands to complete several of his personal bucket list items. TCAA Guide #10 is an introduCtion to the basic knowledge of positional astronomy with whiCh amateur astronomer should be familiar. While it is not a substitute for learning more extensively about the sCienCe of astronomy, this Guide provides the basic information one needs to bridge the gap from neophyte to an observer vested with the knowledge of what it takes to view the heavens using basic equipment properly. As such, this is not a reference work. It is not intended to be the answer to all questions that an amateur astronomer might have. It merely provides sufficient information to advance one in the field of amateur astronomy dealing the positions of things in the sky. Why write Introduction to Spherical Astronomy when there are so many appliCations available for Computers, Cell phones, and tablets that make calculations for observational astronomy in the blink of an eye? The purpose of this Guide is not to make spheriCal astronomers out of amateur astronomers; rather, it is designed to give amateurs a fuller understanding of the workings of eleCtroniC planetarium applications and devices like “goto” telescopes. -

Publications of the Astronomical Society of the Pacific 94:715-721, August 1982
Publications of the Astronomical Society of the Pacific 94:715-721, August 1982 THE IMPORTANCE OF ATMOSPHERIC DIFFERENTIAL REFRACTION IN SPECTROPHOTOMETRY ALEXEI V. FILIPPENKO Department of Astronomy, California Institute of Technology, 105-24, Pasadena, California 91125 Received 1982 March 15 The effects of atmospheric differential refraction on astronomical measurements are much more important than is gen- erally assumed. In particular, it is shown that relative line and continuum intensities in spectrophotometric work may be erroneous if this phenomenon is neglected. To help observers minimize these errors, the relation between object position and optimal slit or aperture orientation is derived, and practical tables and graphs are presented for use at the telescope. Key words: instrumentation—observing techniques—spectrophotometry I. Introduction Π. Atmospheric Differential Refraction Atmospheric differential refraction has long been A. Magnitude known to affect the results of a variety of measurement In this section atmospheric differential refraction as a techniques in astronomy. For example, astrometric function of wavelength is calculated for the conditions work requires observations at small zenith angles and typical of major optical observatories. comparison of plates taken through similar fil- At sea level {P = 760 mm Hg, Τ — 15 0C) the refrac- ter/emulsion combinations—otherwise considerable er- tive index of dry air is given by (Edlén 1953; Coleman, rors in the derived relative positions of objects may be Bozman, and Meggers 1960) made (van de Kamp 1967). On the other hand, solar as- 6 tronomers must often observe through the steady atmo- ("(λ^,τβο - 1)10 = 64.328 sphere shortly after sunrise, and they consequently en- 29498.1 255.4 counter severe difficulties since different regions of the + 146 - (1/λ)2 + 41 - (l/λ)2 ' disk appear along the same line of sight if viewed with a broad-band filter (Simon 1966). -

Answers to Selected Exercises
Answers to selected exercises CHAPTER 1 3. (a) 300 GHz; (b) 21 cm. 5. E 3:98  10À19 J 2.48 eV. 7. Number of electrons at dynodes 1; 2; 3 ÁÁÁ 3; 9; 27; ÁÁÁ: 31; 32; 33 ÁÁÁand after 10 dynodes it is 310. Thus, Q 9:46  10À15 C. 8. (a) Æ1,000 counts; (b) 0.1%; p (c) a factor of 4 2 (to 0.05%). 9. F 3 206,265/128  1.0 1,611.45; F 11.725. Lens 8 the mirror 800. Doublingfocal length implies aberrations are 2 3 8 times smaller; earliest tele- scopes had longfocal lengths. 10. Readout noise dominates for 1 s; background limits S/N for 100 s. CHAPTER 2 1. Diraction-limited angular resolution corresponds to D 85 m: 206; 2651:22=D Angular resolution is 0.003 seconds ofp arc per micron of wavelength. Light- gathering power is only equivalent to 2  10-m 14.1 m telescope (not 85 m). Interferometry gives huge gain in resolution (85/10 8.5). 2. Using1.22 =D, then 0.0500 at 2 mm. Linear dimension (0.0500/206,26500 per rad)  (4.2 lt-yr  6  1012 miles per light-year): linear size 6.15 million miles. 516 Answers to selected exercises Baseline of 100 m 10 better resolution: linear size 615,000 miles or about 2.5 the distance to the Moon. 3. Seeing 0=r0: À6 00 (a) r0 (0.5  10 m/0.75 )206,265 0.14 m; 6=5 (b) r=r0 (2.2/0.5) 5.9, thus at 2.2 mm, r 0.83 m. -

Spherical Trigonometry of the Projected Baseline Angle
Spherical Trigonometry of the Projected Baseline Angle Richard J. Mathar∗ Leiden Observatory, Leiden University, P.O. Box 9513, 2300 RA Leiden, The Netherlands† (Dated: October 29, 2018) The basic geometry of a stellar interferometer with two telescopes consists of a baseline vector and a direction to a star. Two derived vectors are the delay vector, and the projected baseline vector in the plane of the wavefronts of the stellar light. The manuscript deals with the trigonometry of projecting the baseline further outwards onto the celestial sphere. The position angle of the projected baseline is defined, measured in a plane tangential to the celestial sphere, tangent point at the position of the star. This angle represents two orthogonal directions on the sky, differential star positions which are aligned with or orthogonal to the gradient of the delay recorded in the u−v plane. The North Celestial Pole is chosen as the reference direction of the projected baseline angle, adapted to the common definition of the “parallactic” angle. PACS numbers: 95.10.Jk, 95.75.Kk Keywords: projected baseline; parallactic angle; position angle; celestial sphere; spherical astronomy; stellar interferometer I. SCOPE II. SITE GEOMETRY A. Telescope Positions The paper describes a standard to define the plane that contains the baseline of a stellar interferometer and the 1. Spherical Approximation star, and its intersection with the Celestial Sphere. This intersection is a great circle, and its section between the In a geocentric coordinate system, the Cartesian coor- star and the point where the prolongated baseline meets dinates of the two telescopes of a stellar interferometer the Celestial Sphere defines an oriented projected base- are related to the geographic longitudes λi, latitudes φi line.