Phantom Limbs, Neuroprosthetics, and the Developmental Origins of Embodiment Mark S
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Neural Dust: Ultrasonic Biological Interface
Neural Dust: Ultrasonic Biological Interface Dongjin (DJ) Seo Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2018-146 http://www2.eecs.berkeley.edu/Pubs/TechRpts/2018/EECS-2018-146.html December 1, 2018 Copyright © 2018, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Neural Dust: Ultrasonic Biological Interface by Dongjin Seo A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Engineering - Electrical Engineering and Computer Sciences in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Michel M. Maharbiz, Chair Professor Elad Alon Professor John Ngai Fall 2016 Neural Dust: Ultrasonic Biological Interface Copyright 2016 by Dongjin Seo 1 Abstract Neural Dust: Ultrasonic Biological Interface by Dongjin Seo Doctor of Philosophy in Engineering - Electrical Engineering and Computer Sciences University of California, Berkeley Professor Michel M. Maharbiz, Chair A seamless, high density, chronic interface to the nervous system is essential to enable clinically relevant applications such as electroceuticals or brain-machine interfaces (BMI). Currently, a major hurdle in neurotechnology is the lack of an implantable neural interface system that remains viable for a patient's lifetime due to the development of biological response near the implant. -

Perceiving Invisible Light Through a Somatosensory Cortical Prosthesis
ARTICLE Received 24 Aug 2012 | Accepted 15 Jan 2013 | Published 12 Feb 2013 DOI: 10.1038/ncomms2497 Perceiving invisible light through a somatosensory cortical prosthesis Eric E. Thomson1,2, Rafael Carra1,w & Miguel A.L. Nicolelis1,2,3,4,5 Sensory neuroprostheses show great potential for alleviating major sensory deficits. It is not known, however, whether such devices can augment the subject’s normal perceptual range. Here we show that adult rats can learn to perceive otherwise invisible infrared light through a neuroprosthesis that couples the output of a head-mounted infrared sensor to their soma- tosensory cortex (S1) via intracortical microstimulation. Rats readily learn to use this new information source, and generate active exploratory strategies to discriminate among infrared signals in their environment. S1 neurons in these infrared-perceiving rats respond to both whisker deflection and intracortical microstimulation, suggesting that the infrared repre- sentation does not displace the original tactile representation. Hence, sensory cortical prostheses, in addition to restoring normal neurological functions, may serve to expand natural perceptual capabilities in mammals. 1 Department of Neurobiology, Duke University, Box 3209, 311 Research Drive, Bryan Research, Durham, North Carolina 27710, USA. 2 Edmond and Lily Safra International Institute for Neuroscience of Natal (ELS-IINN), Natal 01257050, Brazil. 3 Department of Biomedical Engineering, Duke University, Durham, North Carolina 27710, USA. 4 Department of Psychology and Neuroscience, Duke University, Durham, North Carolina 27710, USA. 5 Center for Neuroengineering, Duke University, Durham, North Carolina 27710, USA. w Present address: University of Sao Paulo School of Medicine, Sao Paulo 01246-000, Brazil. Correspondence and requests for materials should be addressed to M.A.L.N. -

Optogenetics Controlling Neurons with Photons
Valerie C. Coffey Optogenetics Controlling Neurons with Photons An advancing field of neuroscience uses light to understand how the brain works and to create new tools to treat disease. Wireless optogenetics tools like these tiny implants in live mice are enabling scientists to map the stimulation of certain neurons of the brain to specific responses. J. Rogers/Northwestern Univ. 24 OPTICS & PHOTONICS NEWS APRIL 2018 APRIL 2018 OPTICS & PHOTONICS NEWS 25 In just over a decade, the discovery of numerous opsins with different specializations has allowed scientists and engineers to make rapid progress in mapping brain activity. wo thousand years ago, ancient Egyptians halorhodopsin can silence the neurons in the hypo- knew that the electrical shocks of torpedo thalamus, inducing sleep in living mice. fish, applied to the body, could offer pain In just over a decade, the discovery of numerous relief. Two hundred years ago, physicians opsins with different specializations has allowed scien- understood that electrical stimulation of a tists and engineers to make rapid progress in mapping Tfrog’s spine could control muscle contraction. Today, brain activity, motivated by the hope of solving intrac- electrical therapy underlies many treatments, from table neurological conditions. And it doesn’t hurt that pacemakers to pain control. investment in neuroscience research has grown at the But neuroscience has long awaited a more precise same time. tool for controlling specific types of neurons. Electrical In 2013, the Obama administration announced a stimulation (e-stim) approaches stimulate a large area collaborative public-private effort, the Brain Research without precise spatial control, and can’t distinguish through Advancing Innovative Neurotechnologies between different cell types. -
Computational Neuroscience Meets Optogenetics: Unlocking the Brain’S Secrets
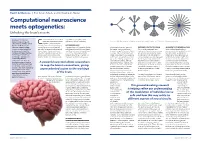
Health & Medicine ︱ Prof Simon Schultz and Dr Konstantin Nikolic Computational neuroscience meets optogenetics: Unlocking the brain’s secrets Working at the interface omposed of billions of specialised responsible for perception, action Simplified models allow researchers to study how the geometry of a neuron’s “dendritic tree” affects its ability to process information. between engineering and nerve cells (called neurons) wired and memory. But this is changing. neuroscience, Professor Simon C together in complex, intricate Schultz and Dr Konstantin webs, the brain is inherently challenging LET THERE BE LIGHT Nikolic at Imperial College to study. Neurons communicate with A powerful new tool (invented by Boyden of Neurotechnology and Director of SHEDDING LIGHT ON THE BRAIN AN INSIGHT INTO NEURONAL GAIN London are developing tools each other by transmitting electrical and and Deisseroth just a little over a decade the Imperial Centre of Excellence in Their innovative approach uses Using two biophysical models of to help us understand the chemical signals along neural circuits: ago) allows researchers to map the brain’s Neurotechnology, Dr Konstantin Nikolic, sophisticated two-photon microscopy, neurons, genetically-modified to include intricate workings of the brain. signals that vary both in space and time. connections, giving unprecedented Associate Professor in the Department optogenetics and electrophysiology two distinct light-sensitive proteins Combining a revolutionary Until now, technical limitations in the access to the workings of the brain. Its of Electrical and Electronic Engineering, to measure (and disturb) patterns of (called opsins): channelrhodopsin-2 technology – optogenetics available research methods to study the impressive resolution enables precise and Dr Sarah Jarvis are taking a unique neuronal activity in vivo (in living tissue). -

Mousecircuits.Org: an Online Repository to Guide the Circuit Era of Disordered Affect
bioRxiv preprint doi: https://doi.org/10.1101/2020.02.16.951608; this version posted February 17, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY-NC-ND 4.0 International license. MouseCircuits.org: An online repository to guide the circuit era of disordered affect Kristin R. Anderson ID 1,2 and Dani Dumitriu ID 1,2 1Columbia University, Departments of Pediatrics and Psychiatry, New York State Psychiatric Institute, 1051 Riverside Drive, New York, NY 10032 2Columbia University, Zuckerman Institute, 3227 Broadway, New York, NY 10027 Affective disorders rank amongst the most disruptive and tem and the gut microbiome (2,3). However, the mysteries of prevalent psychiatric diseases, resulting in enormous societal the brain, a structure with idiosyncratic and interconnected and economic burden, and immeasurable personal costs. Novel architecture, are unlikely to be revealed solely on the basis of therapies are urgently needed but have remained elusive. The this type of sledgehammer approach. era of circuit-mapping in rodent models of disordered affect, ushered in by recent technological advancements allowing for Enter the era of circuit dissection. In the last precise and specific neural control, has reenergized the hope for decade, groundbreaking technological advances have al- precision psychiatry. Here, we present a novel whole-brain cu- lowed neuroscientists to take control of neural firing with mulative network and critically access the progress made to- impressive precision and specificity (Figure 1) (4–7). -

An Embedded Real-Time Processing Platform for Optogenetic Neuroprosthetic Applications
IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, VOL. 26, NO. 1, JANUARY 2018 233 An Embedded Real-Time Processing Platform for Optogenetic Neuroprosthetic Applications Boyuan Yan and Sheila Nirenberg Abstract— Optogenetics offers a powerful new approach temporal resolution. Since these proteins require bright for controlling neural circuits. It has numerous applica- light [23], [24], standard high resolution devices such as LCD tions in both basic and clinical science. These applications monitors are ineffective. While laser or LED-based illumi- require stimulating devices with small processors that can perform real-time neural signal processing, deliver high- nation systems can meet the requirements of light intensity, intensity light with high spatial and temporal resolution, they are not readily suitable for providing spatially-patterned and do not consume a lot of power. In this paper, we stimuli. Digital light processing (DLP) projectors, however demonstrate the implementation of neuronal models in a can achieve this: the key component, a chip called Digital platform consisting of an embedded system module and Micromirror Device (DMD) [25], consists of an array of a portable digital light processing projector. As a replace- ment for damaged neural circuitry, the embedded module several hundred thousand micromirrors, which can change processes neural signals and then directs the projector to position at kHz frequencies. These offer the most flexibility in optogenetically activate a downstream neural pathway. We terms of the spatial and temporal modulation of the activating present a design in the context of stimulating circuits in the light. visual system, but the approach is feasible for a broad range In addition to an effective stimulator, the other essential of biomedical applications. -

Somatosensory Cortical Plasticity in Carpal Tunnel Syndrome Treated by Acupuncture
᭜ Human Brain Mapping 28:159–171(2007) ᭜ Somatosensory Cortical Plasticity in Carpal Tunnel Syndrome Treated by Acupuncture Vitaly Napadow,1,2* Jing Liu,1 Ming Li,1 Norman Kettner,2 Angela Ryan,3 Kenneth K. Kwong,1 Kathleen K.S. Hui,1 and Joseph F. Audette3 1Martinos Center for Biomedical Imaging, Department of Radiology, Massachusetts General Hospital, Charlestown, Massachusetts 2Department of Radiology, Logan College of Chiropractic, Chesterfield, Missouri 3Spaulding Rehabilitation Hospital, Boston, Massachusetts ᭜ ᭜ Abstract: Carpal tunnel syndrome (CTS) is a common entrapment neuropathy of the median nerve characterized by paresthesias and pain in the first through fourth digits. We hypothesize that aberrant afferent input from CTS will lead to maladaptive cortical plasticity, which may be corrected by appro- priate therapy. Functional MRI (fMRI) scanning and clinical testing was performed on CTS patients at baseline and after 5 weeks of acupuncture treatment. As a control, healthy adults were also tested 5 weeks apart. During fMRI, sensory stimulation was performed for median nerve innervated digit 2 (D2) and digit 3 (D3), and ulnar nerve innervated digit 5 (D5). Surface-based and region of interest (ROI)-based analyses demonstrated that while the extent of fMRI activity in contralateral Brodmann Area 1 (BA 1) and BA 4 was increased in CTS compared to healthy adults, after acupuncture there was a significant decrease in contralateral BA 1 (P Ͻ 0.005) and BA 4 (P Ͻ 0.05) activity during D3 sensory stimulation. Healthy adults demonstrated no significant test–retest differences for any digit tested. While D3/D2 separation was contracted or blurred in CTS patients compared to healthy adults, the D2 SI representation shifted laterally after acupuncture treatment, leading to increased D3/D2 separation. -

Implantable Microelectrodes on Soft Substrate with Nanostructured Active Surface for Stimulation and Recording of Brain Activities Valentina Castagnola
Implantable microelectrodes on soft substrate with nanostructured active surface for stimulation and recording of brain activities Valentina Castagnola To cite this version: Valentina Castagnola. Implantable microelectrodes on soft substrate with nanostructured active sur- face for stimulation and recording of brain activities. Micro and nanotechnologies/Microelectronics. Universite Toulouse III Paul Sabatier, 2014. English. tel-01137352 HAL Id: tel-01137352 https://hal.archives-ouvertes.fr/tel-01137352 Submitted on 31 Mar 2015 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. THÈSETHÈSE En vue de l’obtention du DOCTORAT DE L’UNIVERSITÉ DE TOULOUSE Délivré par : l’Université Toulouse 3 Paul Sabatier (UT3 Paul Sabatier) Présentée et soutenue le 18/12/2014 par : Valentina CASTAGNOLA Implantable Microelectrodes on Soft Substrate with Nanostructured Active Surface for Stimulation and Recording of Brain Activities JURY M. Frédéric MORANCHO Professeur d’Université Président de jury M. Blaise YVERT Directeur de recherche Rapporteur Mme Yael HANEIN Professeur d’Université Rapporteur M. Pascal MAILLEY Directeur de recherche Examinateur M. Christian BERGAUD Directeur de recherche Directeur de thèse Mme Emeline DESCAMPS Chargée de Recherche Directeur de thèse École doctorale et spécialité : GEET : Micro et Nanosystèmes Unité de Recherche : Laboratoire d’Analyse et d’Architecture des Systèmes (UPR 8001) Directeur(s) de Thèse : M. -

Influence of Sensory and Proprioceptive Impairment on The
Anesthesiology 2004; 100:979–86 © 2004 American Society of Anesthesiologists, Inc. Lippincott Williams & Wilkins, Inc. Influence of Sensory and Proprioceptive Impairment on the Development of Phantom Limb Syndrome during Regional Anesthesia Xavier Paqueron, M.D.,* Morgan Leguen, M.D.,† Marc E. Gentili, M.D.,‡ Bruno Riou, M.D., Ph.D.,§ Pierre Coriat, M.D.,ʈ Jean Claude Willer, M.D., Ph.D.# Background: The relation between impairment of sensorimo- frequently report perception of position of the anesthe- tor function and occurrence of phantom limb syndrome (PLS) tized limb that does not match its real position, and this during regional anesthesia has not been described. This study assessed the temporal relation between PLS and the progres- illusory position moves and changes until the limb be- sion of sensorimotor impairment during placement of a bra- comes motionless. At this point, most patients report the Downloaded from http://pubs.asahq.org/anesthesiology/article-pdf/100/4/979/354665/0000542-200404000-00032.pdf by guest on 01 October 2021 chial plexus nerve block. final phantom position of their anesthetized limb in a Methods: Fifty-two patients had their arm randomly placed similar and stereotyped position. either alongside their body (group A) or in 90° abduction Several previous studies devoted to phantom limb syn- (group B) immediately after brachial plexus nerve block place- ment. Responses to pin prick, cold, heat, touch, propriocep- drome during regional anesthesia have reported that the tion, and voluntary movement were assessed every 5 min for 60 former is related to the functional alteration of large- min. Meanwhile, patients described their perceptions of the diameter sensory fibers and to the disappearance of size, shape, and position of their anesthetized limb. -

The Reality of Phantom Limbsl
The Reality of Phantom Limbsl Joel Katzz This paper ualuates the joint influence of peripheral neurophysiological factors and higher-order cognitive and ffictive processes in trigeing or madulating a variety of phantow limb uperiences, includ.ing pain. Part I outlines one way in whbh the sympathetic nervaw rystem may influence phantom limb pain- A model involving a sympathetic-efferent somatic-afferent cycle is presented to oeplain fluctuations in the intensity of sewations refer"d to the phantorn limb. In part 2, the model b stended to explain the puzzling futding that only after amputatinn are thaughts and feelings capable of evaking referred sensati.ons to the (phantom) limb. While phantom pains and other sensations frequently are tigered by though* and feelings, there is no evidence that the painful or painl.ess phantom limb is a symptom of a psychological disorder. In part 3, the concept of a pain "memory" is introduced and descibed with examples. The data show that pain expeienced pior to amputation rnay percist in the form of a memory refened to the phantom limb causing continued suffeing and distress. It is argued that two independent and potentially dissocinble memoty components underlie the unified expertence of a pain memory. This conceptualization is evaluated in the context of the suryical arena, raising the possibility that under ceriain conditions postoperative pain may, in part, reflect the persistent central neural memory trace Ieft by the surgical procedure. It is concluded that the experience of a phantom lirnb is determined by a comple,r interection of inputs fram the periphery and widespreael reginns af the brain subserving sensoty, cognitive, and afective processes. -

ECE 5070: Neuroengineering and Neuroprosthetics
ECE 5070: Neuroengineering and Neuroprosthetics Course Description An overview of the broad field of Neuroengineering for graduate and senior undergraduate students with engineering or neuroscience backgrounds. Focusing on neural interfaces and prostheses, this course covers from basic neurophysiology and computational neuronal models to advanced neural interfaces and prostheses currently being actively developed in the field. Transcript Abbreviation: Neur Eng & Prosth Grading Plan: Letter Grade Course Deliveries: Classroom Course Levels: Undergrad, Graduate Student Ranks: Junior, Senior, Masters, Doctoral Course Offerings: Autumn Flex Scheduled Course: Never Course Frequency: Even Years Course Length: 14 Week Credits: 3.0 Repeatable: No Time Distribution: 3.0 hr Lec Expected out-of-class hours per week: 6.0 Graded Component: Lecture Credit by Examination: No Admission Condition: No Off Campus: Never Campus Locations: Columbus Prerequisites and Co-requisites: Prereq: 3050 or BME 3703; or Neurosc 3010; or Grad standing in Engineering or Neurosc. Exclusions: Not open to students with credit for 5194.03 or Neurosc 5070. Cross-Listings: Cross-listed in Neurosc. Course Rationale: Introduce students a vibrant, interdisciplinary field which integrates engineering and neuroscience principles for treating neurological disorders. The course is required for this unit's degrees, majors, and/or minors: No The course is a GEC: No The course is an elective (for this or other units) or is a service course for other units: Yes Subject/CIP Code: 14.1001 Subsidy Level: Doctoral Course Programs Abbreviation Description CpE Computer Engineering EE Electrical Engineering Course Goals Master principles of neural interfaces. Be competent with computational neural models. Be competent with design of common neuroprostheses. -

New Technologies for Human Robot Interaction and Neuroprosthetics
University of Plymouth PEARL https://pearl.plymouth.ac.uk Faculty of Science and Engineering School of Engineering, Computing and Mathematics 2017-07-01 Human-Robot Interaction and Neuroprosthetics: A review of new technologies Cangelosi, A http://hdl.handle.net/10026.1/9872 10.1109/MCE.2016.2614423 IEEE Consumer Electronics Magazine All content in PEARL is protected by copyright law. Author manuscripts are made available in accordance with publisher policies. Please cite only the published version using the details provided on the item record or document. In the absence of an open licence (e.g. Creative Commons), permissions for further reuse of content should be sought from the publisher or author. CEMAG-OA-0004-Mar-2016.R3 1 New Technologies for Human Robot Interaction and Neuroprosthetics Angelo Cangelosi, Sara Invitto Abstract—New technologies in the field of neuroprosthetics and These developments in neuroprosthetics are closely linked to robotics are leading to the development of innovative commercial the recent significant investment and progress in research on products based on user-centered, functional processes of cognitive neural networks and deep learning approaches to robotics and neuroscience and perceptron studies. The aim of this review is to autonomous systems [2][3]. Specifically, one key area of analyze this innovative path through the description of some of the development has been that of cognitive robots for human-robot latest neuroprosthetics and human-robot interaction applications, in particular the Brain Computer Interface linked to haptic interaction and assistive robotics. This concerns the design of systems, interactive robotics and autonomous systems. These robot companions for the elderly, social robots for children with issues will be addressed by analyzing developmental robotics and disabilities such as Autism Spectrum Disorders, and robot examples of neurorobotics research.