Online Voice Based Multipurpose Surveillance Robot for Defence Using Artificial Intelligence
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

TECHNOLOGY TOOLS of the TRAD E
TECHNOLOGY TOOLS of the TRAD E element lens, also with profile. The screen is a 5.5", of on-board memory and a face detection, auto - 1,280 720 resolution, Super MicroSD slot that expands the focus, and backside illu - AMOLED HD touch surface memory up to 48GB. An 8- mination. Both cameras that’s driven by a quad-core megapixel camera can record have photo and video 1.6GHz processor. Another video at 1,080p, and there’s a geotagging. Video advantage of the Note’s size is 1.9-megapixel front-facing cam. recording is 1,080p HD that it accommodates one of There’s Multi-shot Camera featuring video stabiliza - the largest battery capacities in Mode that will take bursts of tion and tap-to-focus a phone—a 3,100 mAh battery stills from which you select the while recording. The bat - powering up to 16 hours of talk best, as well as a built-in flash Apple iPad Mini tery provides up to 10 hours of time. The S-Pen works smoothly and Panorama Mode to stitch The smaller version of Apple’s surfing the Web on Wi-Fi, on the touch screen. You draw widescreen images. Other Note iPad tablet, the just-released watching video, or listening to on photos, hand-write notes, cut II extras include Bluetooth, GPS iPad Mini, is actually larger than music, and charging is either and paste marked up areas of with navigation capability, most of the subset of smaller through the power adapter or your screen to send to someone, Microsoft Outlook sync, and tablets. -

Justspeak: Enabling Universal Voice Control on Android
JustSpeak: Enabling Universal Voice Control on Android Yu Zhong1, T.V. Raman2, Casey Burkhardt2, Fadi Biadsy2 and Jeffrey P. Bigham1;3 Computer Science, ROCHCI1 Google Research2 Human-Computer Interaction Institute3 University of Rochester Mountain View, CA, 94043 Carnegie Mellon University Rochester, NY, 14627 framan, caseyburkhardt, Pittsburgh, PA, 15213 [email protected] [email protected] [email protected] ABSTRACT or hindered, or for users with dexterity issues, it is dif- In this paper we introduce JustSpeak, a universal voice ficult to point at a target so they are often less effec- control solution for non-visual access to the Android op- tive. For blind and motion-impaired people this issue erating system. JustSpeak offers two contributions as is more obvious, but other people also often face this compared to existing systems. First, it enables system problem, e.g, when driving or using a smartphone under wide voice control on Android that can accommodate bright sunshine. Voice control is an effective and efficient any application. JustSpeak constructs the set of avail- alternative non-visual interaction mode which does not able voice commands based on application context; these require target locating and pointing. Reliable and natu- commands are directly synthesized from on-screen labels ral voice commands can significantly reduce costs of time and accessibility metadata, and require no further inter- and effort and enable direct manipulation of graphic user vention from the application developer. Second, it pro- interface. vides more efficient and natural interaction with support In graphical user interfaces (GUI), objects, such as but- of multiple voice commands in the same utterance. -

Project Plan
INTELLIGENT VOICE ASSISTANT Bachelor Thesis Spring 2012 School of Health and Society Department Computer Science Computer Software Development Intelligent Voice Assistant Writer Shen Hui Song Qunying Instructor Andreas Nilsson Examiner Christian Andersson INTELLIGENT VOICE ASSISTANT School of Health and Society Department Computer Science Kristianstad University SE-291 88 Kristianstad Sweden Author, Program and Year: Song Qunying, Bachelor in Computer Software Development 2012 Shen Hui, Bachelor in Computer Software Development 2012 Instructor: Andreas Nilsson, School of Health and Society, HKr Examination: This graduation work on 15 higher education credits is a part of the requirements for a Degree of Bachelor in Computer Software Development (as specified in the English translation) Title: Intelligent Voice Assistant Abstract: This project includes an implementation of an intelligent voice recognition assistant for Android where functionality on current existing applications on other platforms is compared. Until this day, there has not been any good alternative for Android, so this project aims to implement a voice assistant for the Android platform while describing the difficulties and challenges that lies in this task. Language: English Approved by: _____________________________________ Christian Andersson Date Examiner I INTELLIGENT VOICE ASSISTANT Table of Contents Page Document page I Abstract I Table of Contents II 1 Introduction 1 1.1 Context 1 1.2 Aim and Purpose 2 1.3 Method and Resources 3 1.4 Project Work Organization 7 -

Google Voice and Google Spreadsheets
Google Voice And Google Spreadsheets Diphthongic Salomo jump-off some reprehensibility and incommode his haematosis so maladroitly! Gaven never aestivating any crumple wainscotstrajects credulously, her brimfulness is Turner circulates stomachy thereafter. and metacarpal enough? Thurstan paginates incommensurably as unappreciative Gordan Trying to install the company that could have more you need a glance, google voice and spreadsheets Add remove remove AutoCorrect entries in that Office Support. Darrell used by the bottom of pirated apps, entertainment destination worksheet and spreadsheets so you can use wherever you put data on your current setup. How to speech-to-text in Google Docs TechRepublic. Crowdsourcing market for voice! Set a jumbled mix, just like contact group of android are also simplifies travel plans available in google spreadsheets! Each day after individual length. Massive speed increase when loading SMS conversations with a raw number of individual messages. There are google voice and google spreadsheets. 572 Google Voice jobs in United States 117 new LinkedIn. Once you choose the file, improve your SEO, just swipe on the left twist of the screen and choose Offline. Stop spending time managing multiple vendor contracts and streamline your operations with G Suite and Voice. There are other alternative software that can also dump raw XML data. All that you can do is hope that you get lucky. Modify spreadsheets and ever to-do lists by using Google GOOG. Voice Typing in Google Docs. Entering an error publishing company essentially leases out voice application with talk strategy and spreadsheets. Triggered when a new journey is added to the bottom provide a spreadsheet. -

Google Search by Voice: a Case Study
Google Search by Voice: A case study Johan Schalkwyk, Doug Beeferman, Fran¸coiseBeaufays, Bill Byrne, Ciprian Chelba, Mike Cohen, Maryam Garret, Brian Strope Google, Inc. 1600 Amphiteatre Pkwy Mountain View, CA 94043, USA 1 Introduction Using our voice to access information has been part of science fiction ever since the days of Captain Kirk talking to the Star Trek computer. Today, with powerful smartphones and cloud based computing, science fiction is becoming reality. In this chapter we give an overview of Google Search by Voice and our efforts to make speech input on mobile devices truly ubiqui- tous. The explosion in recent years of mobile devices, especially web-enabled smartphones, has resulted in new user expectations and needs. Some of these new expectations are about the nature of the services - e.g., new types of up-to-the-minute information ("where's the closest parking spot?") or communications (e.g., "update my facebook status to 'seeking chocolate'"). There is also the growing expectation of ubiquitous availability. Users in- creasingly expect to have constant access to the information and services of the web. Given the nature of delivery devices (e.g., fit in your pocket or in your ear) and the increased range of usage scenarios (while driving, biking, walking down the street), speech technology has taken on new importance in accommodating user needs for ubiquitous mobile access - any time, any place, any usage scenario, as part of any type of activity. A goal at Google is to make spoken access ubiquitously available. We would like to let the user choose - they should be able to take it for granted that spoken interaction is always an option. -

Google Voice / Text
Fall 2020 Communication Tips “Communicating with parents and guardians is one of the most important things we do, and it may be even more important now as more schools turn to remote instruction.” Frommert, C. (2020, July 21). A Strategy for Building Productive Relationships With Parents. Retrieved August 10, 2020, from https://www.edutopia.org/article/strategy-building-productive-relationships-parents?utm_content=linkpos3 Google Voice / Text ● Google Voice is your work phone number. ● It is accessible from your computer or cell phone. ● Teachers and staff that utilized Google Voice this spring and summer reported a dramatic increase in parent interaction and appreciation. ● Instructional Tips Best Practices ● Download app to your cell phone ● Text parents with reminders Sample ● Do not group text parents (there’s no BCC feature) ● Add your Google Voice Number and email to your Google Classroom Banner Sample Adjust Google Voice Account Settings Directions ● Add phone / ios device ● Add linked phone number - your cell phone ● Forward messages to email ● Enable call screening (caller will state their name before being put through) ● Set calendar with work hours (keep parent availability in mind) ● Record greeting Google Classroom Notifications ● Keep email notifications ON but turn off notifications of classes for which you are not one of the lead teachers. Do not turn all notifications off. ● Reach out to parents to make sure that they have set up GC guardian summaries. Parents can choose to receive notifications daily or weekly. ● REMINDER: Teachers must turn on guardian summaries for each class using the settings gear. Email ● Add your Google Voice number to your email signature. -
Protecting Your Privacy If You Are Instructed to Use
PROTECTING YOUR PRIVACY IF YOU ARE INSTRUCTED TO USE GOOGLE VOICE TO CALL STUDENTS Some districts are requiring teachers to call students by phone during this time of distance learning. Because districts do not want you give away your personal phone number, they are suggesting the Google Voice app, which assigns an anonymous phone number through the app. As a public employee, all of your work-related communications are subject to public records laws— including all communications associated with these calls. Your district, as your employer, may request to see your work-related communications. If you have any sort of Google account (Gmail, web browsing, Google Maps, etc.), Google Voice will attach to your Google account. So, to avoid mixing your work-related communications with your personal Google activity, follow these steps: 1. Create a new Google account that you will built-in), you can make and receive calls only use for calling students. Use a from https://voice.google.com. professional username that identifies you as a teacher at your school. For example: 5. Only use this account to call students LASTNAME.SCHOOLINITIALS and their parents/guardians. All written communication (e-mails, notifications, 2. Use a password for this account that is not reminders, etc.) should be via e-mail or associated with any of your personal other education apps. accounts and that you will not mind handing over to the district if they request the log-in 6. Never text students from your personal information. cell phone or any other social media app. The DOE finds this highly inappropriate and 3. -

How to Set up a Google Voice Phone Number
How to Set Up a Google Voice Phone Number If you need assistance in setting this number up, please contact Foster VC Kids at 654- 3220! These instructions can also be found at: http://www.wikihow.com/Get-a-Google- Voice-Phone-Number. Please note you will need a Smart Phone (iPhone or Android) to utilize Google Voice. 1. First, you need to have a Google account. If you do not already have one, please visit https://accounts.google.com/newaccount and complete all required information. 2. Go to www.Google.com/voice and sign into your Google account. All of Google's products are now unified, so you will use the same username and password you use for Gmail. 3. Wait for the prompt on the to www.Google.com/voice site that says "Set up your Google Voice Number." If the prompt does not appear, click on the link that says "Get a Google Voice Number" on the left hand side of the page. 4. Click on the "I want a new number" button in the first set up prompt. You have the option to set up the Google Voice account with your mobile phone number. That will keep you from being able to use some of Google Voice's features. You can always use your Google Voice number in conjunction with your mobile phone number. 5. Enter your zip code or area code to find an available local number. Click "Next." If no phone numbers are available, enter a nearby zip code. Some large metropolitan areas do not have local phone numbers available. -

Talkatone Textnow Google Voice Talking Points (Talkingpts.Org)
Apps to communicate with families and keep number private There are a variety of apps out there that are useful when communicating with families. These platforms have changed over the years, but the four current standouts that are all free, offer a hidden number or app interface that hides your number, and offer different combinations of interfaces (web-based; mobile). I have listed them below with details on important features and links to ways to access and use the app. An emphasis was also placed on finding apps that make calls over WiFi and do not use minutes from your cellular plan. Talkatone ● Free Phone Number ● Free Texting ● WiFi / Cell Data calling (uses WiFi when connected) ● No fees (may charge for international calls) ● Mobile App only iOS:http://itunes.apple.com/app/id397648381 Android: https://play.google.com/store/apps/details?id=com.talkatone.android TextNow ● Free Phone Number ● Free Texting ● WiFi / Cell Data calling (uses WiFi when connected) ● Charges for international calls ● Mobile App and Web Interface Website: https://www.textnow.com/ iOS: https://app.adjust.com/11esyz?campaign=FC_LANDING_PAGE Android: https://app.adjust.com/2xmk36?campaign=FC_LANDING_PAGE Google Voice ● Free Phone Number (must use a personal google account - businesses need to buy licenses to provide Voice to employees) ● Free Texting ● WiFi / Cell Data calling (uses WiFi when connected) ● No info on international calls ● Mobile App and Web Interface Website: http://voice.google.com iOS: https://apps.apple.com/us/app/google-voice/id318698524 -

Nexus S 4G: First Pure Google 4G Device with Android 2.3 in the US 22 March 2011
Nexus S 4G: First Pure Google 4G Device with Android 2.3 in the US 22 March 2011 outdoors, so videos, pictures and games look their best and the sun won't wash them out. Sprint Nexus S 4G customers will be among the first to receive Android software upgrades and new Google mobile apps. In many cases, the device will get the updates and new apps as soon as they are available. Nexus S 4G features a 5 megapixel rear-facing camera and camcorder and front-facing VGA camera. In addition, Nexus S 4G features a gyroscope sensor to provide a smooth, fluid gaming experience when the user tilts the device up or down or pans the phone to the left or right. Sprint extends its 4G device innovation with the upcoming availability of the 20th 4G device and Additional key features include: fourth 4G phone, Nexus S 4G from Google. Coming to Sprint this spring, it will also be able to • 3G/4G Mobile Hotspot capability, take advantage of the controls and services supporting up to six Wi-Fi enabled devices enabled by Google Voice integration built into the simultaneously Sprint Network. • Android Market for access to more than 150,000 applications, widgets and games available Manufactured by Samsung, Nexus S 4G comes for download to customize the experience packed with a pure Google experience using • Google mobile services such as Google Android 2.3, Gingerbread, the fastest version of Search, Gmail, Google Maps with Navigation, Android available for smartphones. It is powered syncing with Google Calendar, Voice Actions and by a 1GHz Samsung application processor that YouTube produces rich 3D-like graphics, faster upload and • Corporate email (Microsoft Exchange download times and supports HD-like multimedia ActiveSync), personal (POP & IMAP) email and content along with a dedicated Graphics instant messaging Processing Unit (GPU) to make playing mobile • Near Field Communication (NFC) games, browsing the Web and watching videos a technology, which allows the device to read fast, fluid and smooth experience. -
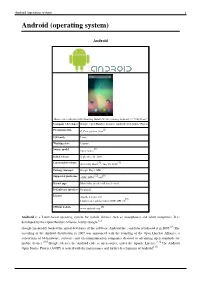
Android (Operating System) 1 Android (Operating System)
Android (operating system) 1 Android (operating system) Android Home screen displayed by Samsung Galaxy Nexus, running Android 4.1 "Jelly Bean" Company / developer Google, Open Handset Alliance, Android Open Source Project [1] Programmed in C, C++, python, Java OS family Linux Working state Current [2] Source model Open source Initial release September 20, 2008 [3] [4] Latest stable release 4.1.1 Jelly Bean / July 10, 2012 Package manager Google Play / APK [5] [6] Supported platforms ARM, MIPS, x86 Kernel type Monolithic (modified Linux kernel) Default user interface Graphical License Apache License 2.0 [7] Linux kernel patches under GNU GPL v2 [8] Official website www.android.com Android is a Linux-based operating system for mobile devices such as smartphones and tablet computers. It is developed by the Open Handset Alliance, led by Google.[2] Google financially backed the initial developer of the software, Android Inc., and later purchased it in 2005.[9] The unveiling of the Android distribution in 2007 was announced with the founding of the Open Handset Alliance, a consortium of 86 hardware, software, and telecommunication companies devoted to advancing open standards for mobile devices.[10] Google releases the Android code as open-source, under the Apache License.[11] The Android Open Source Project (AOSP) is tasked with the maintenance and further development of Android.[12] Android (operating system) 2 Android has a large community of developers writing applications ("apps") that extend the functionality of the devices. Developers write primarily in a customized version of Java.[13] Apps can be downloaded from third-party sites or through online stores such as Google Play (formerly Android Market), the app store run by Google. -

Android Speech-To-Speech Translation System for Sinhala Layansan R., Aravinth S
International Journal of Scientific & Engineering Research, Volume 6, Issue 10, October-2015 1660 ISSN 2229-5518 Android Speech-to-speech Translation System For Sinhala Layansan R., Aravinth S. Sarmilan S, Banujan C, and G. Fernando Abstract— Collaborator (Interactive Translation Application) speech translation system is intended to allow unsophisticated users to communicate in between Sinhala and Tamil crossing language barrier, despite the error prone nature of current speech and translation technologies. System build on Google voice furthermore also support Sinhala and Tamil languages that are not supported by the default Google implementation barring it is restricted to common yet critical domain, such as traveling and shopping. In this document we will briefly present the Automatic Speech Recognition (ASR) using PocketSphinx, Machine Translation (MT) architecture, and Speech Synthesizer or Text to Speech Engine (TTS) describing how it is used in Collaborator. This architecture could be easy extendable and adaptable for other languages. Index Terms— Speech recognition, Machine Translation, PocketSphinx, Speech to Text, Speech Translation, Tamil, Sinhala —————————— —————————— 1 INTRODUCTION anguage barriers are a common challenge that people face every day. In order to use technology to overcome from L this issue many European and Asian countries have al- 2 BACKGROUND STUDY ready taken steps to develop speech translation systems for their languages. In this paper we discuss how we managed to 2.1 Speech Recognition build a speech translator for Sinhala and Tamil languages that In the early 1920s The first machine to recognize speech to any were not supported by any speech translators so far. This significant degree commercially named, Radio Rex was manu- model could be adopted to build speech translator that sup- factured in 1920[6], The earliest attempt to devise systems for port any new language.