Fundamental Study on Energy Transformation in Dynamic Systems Controlled by Uplifting Slide Shoe
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Energy Literacy Essential Principles and Fundamental Concepts for Energy Education
Energy Literacy Essential Principles and Fundamental Concepts for Energy Education A Framework for Energy Education for Learners of All Ages About This Guide Energy Literacy: Essential Principles and Intended use of this document as a guide includes, Fundamental Concepts for Energy Education but is not limited to, formal and informal energy presents energy concepts that, if understood and education, standards development, curriculum applied, will help individuals and communities design, assessment development, make informed energy decisions. and educator trainings. Energy is an inherently interdisciplinary topic. Development of this guide began at a workshop Concepts fundamental to understanding energy sponsored by the Department of Energy (DOE) arise in nearly all, if not all, academic disciplines. and the American Association for the Advancement This guide is intended to be used across of Science (AAAS) in the fall of 2010. Multiple disciplines. Both an integrated and systems-based federal agencies, non-governmental organizations, approach to understanding energy are strongly and numerous individuals contributed to the encouraged. development through an extensive review and comment process. Discussion and information Energy Literacy: Essential Principles and gathered at AAAS, WestEd, and DOE-sponsored Fundamental Concepts for Energy Education Energy Literacy workshops in the spring of 2011 identifies seven Essential Principles and a set of contributed substantially to the refinement of Fundamental Concepts to support each principle. the guide. This guide does not seek to identify all areas of energy understanding, but rather to focus on those To download this guide and related documents, that are essential for all citizens. The Fundamental visit www.globalchange.gov. Concepts have been drawn, in part, from existing education standards and benchmarks. -

STARS in HYDROSTATIC EQUILIBRIUM Gravitational Energy
STARS IN HYDROSTATIC EQUILIBRIUM Gravitational energy and hydrostatic equilibrium We shall consider stars in a hydrostatic equilibrium, but not necessarily in a thermal equilibrium. Let us define some terms: U = kinetic, or in general internal energy density [ erg cm −3], (eql.1a) U u ≡ erg g −1 , (eql.1b) ρ R M 2 Eth ≡ U4πr dr = u dMr = thermal energy of a star, [erg], (eql.1c) Z Z 0 0 M GM dM Ω= − r r = gravitational energy of a star, [erg], (eql.1d) Z r 0 Etot = Eth +Ω = total energy of a star , [erg] . (eql.1e) We shall use the equation of hydrostatic equilibrium dP GM = − r ρ, (eql.2) dr r and the relation between the mass and radius dM r =4πr2ρ, (eql.3) dr to find a relations between thermal and gravitational energy of a star. As we shall be changing variables many times we shall adopt a convention of using ”c” as a symbol of a stellar center and the lower limit of an integral, and ”s” as a symbol of a stellar surface and the upper limit of an integral. We shall be transforming an integral formula (eql.1d) so, as to relate it to (eql.1c) : s s s GM dM GM GM ρ Ω= − r r = − r 4πr2ρdr = − r 4πr3dr = (eql.4) Z r Z r Z r2 c c c s s s dP s 4πr3dr = 4πr3dP =4πr3P − 12πr2P dr = Z dr Z c Z c c c s −3 P 4πr2dr =Ω. Z c Our final result: gravitational energy of a star in a hydrostatic equilibrium is equal to three times the integral of pressure within the star over its entire volume. -

Energy Conservation in a Spring
Part II: Energy Conservation in a Spring Activity 4 Title: Forces and Energy in a Spring Summary: Students will use the “Masses and Springs” simulation from PhET to investigate the relationship between gravitational potential energy, spring potential energy, and mass. Standard: PS2 (Ext) - 5 Students demonstrate an understanding of energy by… 5aa Identifying, measuring, calculating and analyzing qualitative and quantitative relationships associated with energy transfer or energy transformation. Specific Learning Goals: 1. Understand how to calculate the force constant of a spring using the formula F = -k ∆x 2. Understand that even though energy is transformed during the oscillation of a spring among gravitational potential energy, elastic potential energy, and kinetic energy, the total energy in the system remains constant. 3. Understand how to calculate the gravitational potential energy for a mass which is lifted to a height above a table. 4. Understand how to calculate the elastic potential energy for a spring which has been displaced by a certain distance. Prior Knowledge: 1. The restoring force that a spring exerts on a mass is proportional to the displacement of the spring and the spring constant and is in a direction opposite the displacement: F = -k ∆x 2. Gravitational potential energy is calculated by the formula: PEg = mgΔh 2 3. Elastic potential energy is calculated by the formula: PEs = ½ k ∆x 4. In a mass and spring system at equilibrium, the restoring force is equal to the gravitational force on the suspended mass (Fg = mg) Schedule: 40-50 minutes Materials: “Masses and Springs 2.02 PhET” Engage: Three different masses are suspended from a spring. -

Potential Energy
Potential Energy • So far: Considered all forces equal, calculate work done by net force only => Change in kinetic energy. – Analogy: Pure Cash Economy • But: Some forces seem to be able to “store” the work for you (when they do negative work) and “give back” the same amount (when they do positive work). – Analogy: Bank Account. You pay money in (ending up with less cash) - the money is stored for you - you can withdraw it again (get cash back) • These forces are called “conservative” (they conserve your work/money for you) Potential Energy - Example • Car moving up ramp: Weight does negative work ΔW(grav) = -mgΔh • Depends only on initial and final position • Can be retrieved as positive work on the way back down • Two ways to describe it: 1) No net work done on car on way up F Pull 2) Pulling force does positive F Normal y work that is stored as gravitational x potential energy ΔU = -ΔW(grav) α F Weight Total Mechanical Energy • Dimension: Same as Work Unit: Nm = J (Joule) Symbol: E = K.E. + U 1) Specify all external *) forces acting on a system 2) Multiply displacement in the direction of the net external force with that force: ΔWext = F Δs cosφ 3) Set equal to change in total energy: m 2 m 2 ΔE = /2vf - /2vi + ΔU = ΔWext ΔU = -Wint *) We consider all non-conservative forces as external, plus all forces that we don’t want to include in the system. Example: Gravitational Potential Energy *) • I. Motion in vertical (y-) direction only: "U = #Wgrav = mg"y • External force: Lift mass m from height y i to height y f (without increasing velocity) => Work gets stored as gravitational potential energy ΔU = mg (yf -yi)= mg Δy ! • Free fall (no external force): Total energy conserved, change in kinetic energy compensated by change in m 2 potential energy ΔK.E. -

How Long Would the Sun Shine? Fuel = Gravitational Energy? Fuel
How long would the Sun shine? Fuel = Gravitational Energy? • The mass of the Sun is M = 2 x 1030 kg. • The Sun needs fuel to shine. – The amount of the fuel should be related to the amount of – The Sun shines by consuming the fuel -- it generates energy mass. from the fuel. • Gravity can generate energy. • The lifetime of the Sun is determined by – A falling body acquires velocity from gravity. – How fast the Sun consumes the fuel, and – Gravitational energy = (3/5)GM2/R – How much fuel the Sun contains. – The radius of the Sun: R = 700 million m • How fast does the Sun consume the fuel? – Gravitational energy of the Sun = 2.3 x 1041 Joules. – Energy radiated per second is called the “luminosity”, which • How long could the Sun shine on gravitational energy? is in units of watts. – Lifetime = (Amount of Fuel)/(How Fast the Fuel is – The solar luminosity is about 3.8 x 1026 Watts. Consumed) 41 26 • Watts = Joules per second – Lifetime = (2.3 x 10 Joules)/(3.8 x 10 Joules per second) = 0.6 x 1015 seconds. • Compare it with a light bulb! – Therefore, the Sun lasts for 20 million years (Helmholtz in • What is the fuel?? 1854; Kelvin in 1887), if gravity is the fuel. Fuel = Nuclear Energy Burning Hydrogen: p-p chain • Einstein’s Energy Formula: E=Mc2 1 1 2 + – The mass itself can be the source of energy. • H + H -> H + e + !e 2 1 3 • If the Sun could convert all of its mass into energy by • H + H -> He + " E=Mc2… • 3He + 3He -> 4He + 1H + 1H – Mass energy = 1.8 x 1047 Joules. -

Gravitational Potential Energy
An easy way for numerical calculations • How long does it take for the Sun to go around the galaxy? • The Sun is travelling at v=220 km/s in a mostly circular orbit, of radius r=8 kpc REVISION Use another system of Units: u Assume G=1 Somak Raychaudhury u Unit of distance = 1kpc www.sr.bham.ac.uk/~somak/Y3FEG/ u Unit of velocity= 1 km/s u Then Unit of time becomes 109 yr •Course resources 5 • Website u And Unit of Mass becomes 2.3 × 10 M¤ • Books: nd • Sparke and Gallagher, 2 Edition So the time taken is 2πr/v = 2π × 8 /220 time units • Carroll and Ostlie, 2nd Edition Gravitational potential energy 1 Measuring the mass of a galaxy cluster The Virial theorem 2 T + V = 0 Virial theorem Newton’s shell theorems 2 Potential-density pairs Potential-density pairs Effective potential Bertrand’s theorem 3 Spiral arms To establish the existence of SMBHs are caused by density waves • Stellar kinematics in the core of the galaxy that sweep • Optical spectra: the width of the spectral line from around the broad emission lines Galaxy. • X-ray spectra: The iron Kα line is seen is clearly seen in some AGN spectra • The bolometric luminosities of the central regions of The Winding some galaxies is much larger than the Eddington Paradox (dilemma) luminosity is that if galaxies • Variability in X-rays: Causality demands that the rotated like this, the spiral structure scale of variability corresponds to an upper limit to would be quickly the light-travel time erased. -

Gravitational Potential and Energy of Homogeneous Rectangular
View metadata, citationGravitational and similar papers potential at core.ac.uk and energy of homogeneous rectangular parallelepipedbrought to you by CORE provided by CERN Document Server Zakir F. Seidov, P.I. Skvirsky Department of Physics, Ben-Gurion University of the Negev, Beer-Sheva, 84105, Israel Gravitational potential and gravitational energy are presented in analytical form for homogeneous right parallelepiped. PACS numbers: 01.55.+b, 45.20.Dd, 96.35.Fs Keywords: Newtonian mechanics; mass, size, gravitational fields I. INTRODUCTION: BASIC FORMULAE As it is well known, Newtonian gravitational potential, of homogeneous body with constant density ρ,atpoint (X,Y,Z) is defined as triple integral over the body's volume: ZZZ U(X; Y; Z)=Gρ u(X; Y; Z; x; y; z) dxdydz (1) with −1=2 u(X; Y; Z; x; y; z)=[(x − X)2 +(y − Y )2 +(z − Z)2] ;(2) here G stands for Newtonian constant of gravitation. In spite of almost 400-year-long attempts since Isaac Newton' times, the integral (1) is known in closed form (not in the series!) in quite a few cases [1]: a) a piece of straight line, b) a sphere, c) an ellipsoid; note that both cases a) and b) may be considered as particular cases of c). As to serial solution, the integral (1) is expressed in terms of the various kinds of series for external points outside the minimal sphere containing the whole body (non-necessary homogeneous), as well as for inner points close to the origin of co-ordinates. However in this note we do not touch the problem of serial solution and are only interested in exact analytical solution of (1). -

History of Energy
CONCISE ENCYCLOPEDIA OF HISTORY OF ENERGY Editor C. CLEVELAND Boston University, Boston, MA, USA ELSEVIER Amsterdam—Boston—Heidelberg—London—New York—Oxford Paris—San Diego—San Francisco—Singapore—Sydney—Tokyo CONTENTS Editor's Preface vii Alphabetical List of Articles ix c Coal Industry, History of Jaak J K Daemen 1 Coal Mining in Appalachia, History of Geoffrey L Buckley 17 Conservation Measures for Energy, History of John H Gibbons, Holly L Gwin 27 Conservation of Energy Concept, History of Elizabeth Garber 36 E Early Industrial World, Energy Flow in Richard D Periman 45 Economic Thought, History of Energy in Paul Christensen 53 Ecosystems and Energy: History and Overview Charles AS Hall 65 Electricity Use, History of David E Nye 77 Energy in the History and Philosophy of Science Robert P Crease 90 Environmental Change and Energy 1 G Simmons 94 F Fire: A Socioecological and Historical Survey Johan Goudsblom 105 G Geographic Thought, History of Energy in Barry D Solomon, Martin J pasqualetti 117 H Hydrogen, History of Seth Dunn 127 Hydropower, History and Technology of John S Gulliver, Roger E A Arndt 138 M Manufactured Gas, History of Joel A Tarr 153 N Natural Gas, History of Christopher J Castaneda 163 Nuclear Power, History of Robert J Duffy 175 Contents O Oil Crises, Historical Perspective Mamdouh G Salameh 189 Oil Industry, History of August W Giebelhaus 203 OPEC Market Behavior, 1973-2003 A F Alhajji 215 OPEC, History of Fadhil J Chalabi 228 P Prices of Energy, History of Peter Berck, Michael J Roberts 241 Q Sociopolitical Collapse, Energy and Joseph A Tainter 251 Solar Energy, History of John Perlin 265 T Thermodynamic Sciences, History of Keith Hutchison 281 Transitions in Energy Use Arnulf Grübler 287 w War and Energy Vaclav Smil 301 Wind Energy, History of Martin Pasqualetti, Robert Righter, Paul Gipe 309 Wood Energy, History of John Perlin 323 World History and Energy Vaclav Smil 331 List of Contributors 343 Subject Index 345 vi. -

Chapter 1: Energy Challenges September 2015 1 Energy Challenges
QUADRENNIAL TECHNOLOGY REVIEW AN ASSESSMENT OF ENERGY TECHNOLOGIES AND RESEARCH OPPORTUNITIES Chapter 1: Energy Challenges September 2015 1 Energy Challenges Energy is the Engine of the U.S. Economy Quadrennial Technology Review 1 1 Energy Challenges 1.1 Introduction The United States’ energy system, vast in size and increasingly complex, is the engine of the economy. The national energy enterprise has served us well, driving unprecedented economic growth and prosperity and supporting our national security. The U.S. energy system is entering a period of unprecedented change; new technologies, new requirements, and new vulnerabilities are transforming the system. The challenge is to transition to energy systems and technologies that simultaneously address the nation’s most fundamental needs—energy security, economic competitiveness, and environmental responsibility—while providing better energy services. Emerging advanced energy technologies can do much to address these challenges, but further improvements in cost and performance are important.1 Carefully targeted research, development, demonstration, and deployment (RDD&D) are essential to achieving these improvements and enabling us to meet our nation’s energy objectives. This report, the 2015 Quadrennial Technology Review (QTR 2015), examines science and technology RDD&D opportunities across the entire U.S. energy system. It focuses primarily on technologies with commercialization potential in the mid-term and beyond. It frames various tradeoffs that all energy technologies must balance, across such dimensions as diversity and security of supply, cost, environmental impacts, reliability, land use, and materials use. Finally, it provides data and analysis on RDD&D pathways to assist decision makers as they set priorities, subject to budget constraints, to develop more secure, affordable, and sustainable energy services. -
Energy and Energy Transformations Transformations Energy
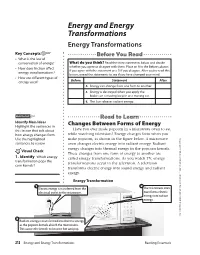
Energy and Energy Transformations Energy Transformations Key Concepts • What is the law of conservation of energy? What do you think? Read the three statements below and decide • How does friction affect whether you agree or disagree with them. Place an A in the Before column if you agree with the statement or a D if you disagree. After you’ve read this energy transformations? lesson, reread the statements to see if you have changed your mind. • How are different types of energy used? Before Statement After 4. Energy can change from one form to another. 5. Energy is destroyed when you apply the brakes on a moving bicycle or a moving car. 6. The Sun releases radiant energy. Identify Main Ideas Highlight the sentences in Changes Between Forms of Energy this lesson that talk about Have you ever made popcorn in a microwave oven to eat how energy changes form. while watching television? Energy changes form when you Use the highlighted make popcorn, as shown in the figure below. A microwave Companies, Inc. The McGraw-Hill of a division © Glencoe/McGraw-Hill, Copyright sentences to review. oven changes electric energy into radiant energy. Radiant energy changes into thermal energy in the popcorn kernels. Visual Check These changes from one form of energy to another are 1. Identify Which energy called energy transformations. As you watch TV, energy transformation pops the transformations occur in the television. A television corn kernels? transforms electric energy into sound energy and radiant energy. Energy Transformation 1 2 Electric energy is transferred from the The microwave oven electrical outlet to the microwave. -

From Atoms to Electricity
STEM PROJECT STARTER Transform Energy Topic From Atoms to Electricity PROJECT DETAILS Overview Course This project provides students with the opportunity to synthesize what they have Physical Science learned about energy transformation in other power systems to develop a model that describes the energy conversions in a nuclear power plant. Nuclear power Grade Span plants work by using the heat from fission to create mechanical energy, which turns 6-8 an electric generator. This heat is used to make steam, that turns a turbine, and Duration then turns the generator. Nuclear power is the only energy source with near-zero x2 45–60-minute sessions carbon emissions that can sustainably deliver energy to our industrial society. Concept Transformation of Energy Essential Question How does the energy stored in an atom’s nucleus transform into the electricity that powers our lives? Materials • Image of nuclear power plant • Projector to display video • From Atom to Electricity Rubrics student handout • Chart paper for students to sketch their diagram • Nuclear Power Plant Diagram student handout (optional) Procedure Think Energy n Display an image of a nuclear power plant. 1 Transform Energy Microsite | From Atoms to Electricity Encourage students to look closely and try to observe as many details as possible. o Give students five minutes to jot down answers to the following questions: • What do you see? Remind students to only report on things they actually see in the image. • What do you think about that? • What does it make you wonder? • Facilitate a group discussion about the questions. • Ask students to use the following stems when sharing: “I see...,” “I think...,” “I wonder....” Prior to watching/reading/listening to the video below, divide students into teams of four students and assign each a p perspective ‘hat’ to take while watching the content: a. -

Wind Wind Energy Transformation
Wind Wind Energy Transformation _______________ Æ _______________ Æ _______________ What is wind energy? In reality, wind energy is a converted form of solar energy. The sun's radiation (light) heats different parts of the earth at different rates‐most notably during the day and night, but also when different surfaces (for example, water and land) absorb or reflect at different rates. This in turn causes portions of the atmosphere to warm differently. Hot air rises, reducing the atmospheric pressure at the earth's surface, and cooler air is drawn in to replace it. The result is wind. Air has mass, and when it is in motion, it contains the energy of that motion ("kinetic energy"). The bottom line is that as long as we have sun, we will have wind. And with wind, we have enough available energy to meet all of our electricity needs. Where is the US wind energy? Areas along the Rocky Mountains have outstanding sustainable wind energy. The highest potential for wind energy includes the coastal regions of the Atlantic, Pacific, Gulf of Mexico as well as the Great Lakes. Texas, Kansas, Nebraska, North and South Dakota, Montana, and Wyoming are the best interior locations. Ohio has marginal available wind energy. The price of wind generated electricity is approximately $0.08/kw. What is a wind turbine and how does it work? A wind energy system transforms the kinetic energy of the wind into mechanical or electrical energy that can be harnessed for practical use. Wind electric turbines generate electricity for homes and businesses and for sale to utilities.