In the Case of Local Fastcgi Processes on the Web Server) Or TCP Connection (For Remote Fastcgi Processes in a Server Farm)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Analysis of Server-Smartphone Application Communication Patterns
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Aaltodoc Publication Archive Aalto University School of Science Degree Programme in Computer Science and Engineering Péter Somogyi Analysis of server-smartphone application communication patterns Master’s Thesis Budapest, June 15, 2014 Supervisors: Professor Jukka Nurminen, Aalto University Professor Tamás Kozsik, Eötvös Loránd University Instructor: Máté Szalay-Bekő, M.Sc. Ph.D. Aalto University School of Science ABSTRACT OF THE Degree programme in Computer Science and MASTER’S THESIS Engineering Author: Péter Somogyi Title: Analysis of server-smartphone application communication patterns Number of pages: 83 Date: June 15, 2014 Language: English Professorship: Data Communication Code: T-110 Software Supervisor: Professor Jukka Nurminen, Aalto University Professor Tamás Kozsik, Eötvös Loránd University Instructor: Máté Szalay-Bekő, M.Sc. Ph.D. Abstract: The spread of smartphone devices, Internet of Things technologies and the popularity of web-services require real-time and always on applications. The aim of this thesis is to identify a suitable communication technology for server and smartphone communication which fulfills the main requirements for transferring real- time data to the handheld devices. For the analysis I selected 3 popular communication technologies that can be used on mobile devices as well as from commonly used browsers. These are client polling, long polling and HTML5 WebSocket. For the assessment I developed an Android application that receives real-time sensor data from a WildFly application server using the aforementioned technologies. Industry specific requirements were selected in order to verify the usability of this communication forms. The first one covers the message size which is relevant because most smartphone users have limited data plan. -

TMS Xdata Documentation
Overview TMS XData is a Delphi framework that allows you to create HTTP/HTTPS servers that expose data through REST/JSON. It is highly integrated into TMS Aurelius in a way that creating XData services based on applications with existing Aurelius mappings are just a matter of a few lines of code. XData defines URL conventions for adressing resources, and it specifies the JSON format of message payloads. It is heavily based on the OData standard. Such conventions, with the benefit of existing Aurelius mapping, allow building a full REST/JSON server with minimum writing of code. TMS XData uses TMS Sparkle as its core communication library. TMS XData product page: https://www.tmssoftware.com/site/xdata.asp TMS Software site: https://www.tmssoftware.com TMS XData is a full-featured Delphi framework that allows you to create REST/JSON servers, using server-side actions named service operations, and optionally exposing TMS Aurelius entities through REST endpoints. Consider that you have an Aurelius class mapped as follows: [Entity, Automapping] TCustomer = class strict private FId: integer; FName: string; FTitle: string; FBirthday: TDateTime; FCountry: TCountry; public property Id: Integer read FId write FId; property Name: string read FName write FName; property Title: string read FTitle write FTitle; property Birthday: TDateTime read FDateTime write FDateTime; property Country: TCountry read FCountry write FCountry; end; With a few lines of code you can create an XData server to expose these objects. You can retrieve an existing TCustomer -

Implementation of Embedded Web Server Based on ARM11 and Linux Using Raspberry PI
International Journal of Recent Technology and Engineering (IJRTE) ISSN: 2277-3878, Volume-3 Issue-3, July 2014 Implementation of Embedded Web Server Based on ARM11 and Linux using Raspberry PI Girish Birajdar Abstract— As ARM processor based web servers not uses III. HARDWARE USED computer directly, it helps a lot in reduction of cost. In this We will use different hardware to implement this embedded project our aim is to implement an Embedded Web Server (EWS) based on ARM11 processor and Linux operating system using web server, which are described in this section. Raspberry Pi. it will provide a powerful networking solution with 1. Raspberry Pi : The Raspberry Pi is low cost ARM wide range of application areas over internet. We will run web based palm-size computer. The Raspberry Pi has server on an embedded system having limited resources to serve microprocessor ARM1176JZF-S which is a member of embedded web page to a web browser. ARM11 family and has ARMv6 architecture. It is build Index Terms— Embedded Web Server, Raspberry Pi, ARM, around a BCM2835 broadcom processor. ARM processor Ethernet etc. operates at 700 MHz & it has 512 MB RAM. It consumes 5V electricity at 1A current due to which power I. INTRODUCTION consumption of raspberry pi is less. It has many peripherals such as USB port, 10/100 ethernet, GPIO, HDMI & With evolution of World-Wide Web (WWW), its composite video outputs and SD card slot.SD card slot is application areas are increasing day by day. Web access used to connect the SD card which consist of raspberry linux functionality can be embedded in a low cost device which operating system. -

Data Management for Portable Media Players
Data Management for Portable Media Players Table of Contents Introduction..............................................................................................2 The New Role of Database........................................................................3 Design Considerations.................................................................................3 Hardware Limitations...............................................................................3 Value of a Lightweight Relational Database.................................................4 Why Choose a Database...........................................................................5 An ITTIA Solution—ITTIA DB........................................................................6 Tailoring ITTIA DB for a Specific Device......................................................6 Tables and Indexes..................................................................................6 Transactions and Recovery.......................................................................7 Simplifying the Software Development Process............................................7 Flexible Deployment................................................................................7 Working with ITTIA Toward a Successful Deployment....................................8 Conclusion................................................................................................8 Copyright © 2009 ITTIA, L.L.C. Introduction Portable media players have evolved significantly in the decade that has -

A Sense of Time for Node.Js: Timeouts As a Cure for Event Handler Poisoning
A Sense of Time for Node.js: Timeouts as a Cure for Event Handler Poisoning Anonymous Abstract—The software development community has begun to new Denial of Service attack that can be used against EDA- adopt the Event-Driven Architecture (EDA) to provide scalable based services. Our Event Handler Poisoning attack exploits web services. Though the Event-Driven Architecture can offer the most important limited resource in the EDA: the Event better scalability than the One Thread Per Client Architecture, Handlers themselves. its use exposes service providers to a Denial of Service attack that we call Event Handler Poisoning (EHP). The source of the EDA’s scalability is also its Achilles’ heel. Multiplexing unrelated work onto the same thread re- This work is the first to define EHP attacks. After examining EHP vulnerabilities in the popular Node.js EDA framework and duces overhead, but it also moves the burden of time sharing open-source npm modules, we explore various solutions to EHP- out of the thread library or operating system and into the safety. For a practical defense against EHP attacks, we propose application itself. Where OTPCA-based services can rely on Node.cure, which defends a large class of Node.js applications preemptive multitasking to ensure that resources are shared against all known EHP attacks by making timeouts a first-class fairly, using the EDA requires the service to enforce its own member of the JavaScript language and the Node.js framework. cooperative multitasking [89]. An EHP attack identifies a way to defeat the cooperative multitasking used by an EDA-based Our evaluation shows that Node.cure is effective, broadly applicable, and offers strong security guarantees. -

Overview Guide Release 21B F45060-01
Oracle Utilities Customer Care and Billing Cloud Service Overview Guide Release 21B F45060-01 August 2021 Oracle Utilities Customer Care and Billing Cloud Service Release 21B Overview Guide Copyright © 2012, 2021 Oracle and/or its affiliates. All rights reserved. This software and related documentation are provided under a license agreement containing restrictions on use and disclosure and are protected by intellectual property laws. Except as expressly permitted in your license agreement or allowed by law, you may not use, copy, reproduce, translate, broadcast, modify, license, transmit, distribute, exhibit, perform, publish, or display any part, in any form, or by any means. Reverse engineering, disassembly, or decompilation of this software, unless required by law for interoperability, is prohibited. The information contained herein is subject to change without notice and is not warranted to be error-free. If you find any errors, please report them to us in writing. If this is software or related documentation that is delivered to the U.S. Government or anyone licensing it on behalf of the U.S. Government, then the following notice is applicable: U.S. GOVERNMENT END USERS: Oracle programs (including any operating system, integrated software, any programs embedded, installed or activated on delivered hardware, and modifications of such programs) and Oracle computer documentation or other Oracle data delivered to or accessed by U.S. Government end users are "commercial computer software" or "commercial computer software documentation" -

Industrial Ethernet Quick and Simple Explanation of Key Terms
Industrial Ethernet Quick and simple explanation of key terms EN_Bro_Glossar_Netzwerktechnik_A6_Rev02.indd 1 26.05.14 15:26 Industrial Ethernet The use of industrial Ethernet communication offers many advantages and is becoming more common in the automation of production plants and machinery. Many new technical terms from the IT world are also being used in this context among industrial users. In this glossary, we have listed and explained the main techni- cal terms from the field of Industrial Ethernet – we make Ethernet easy. 2 PHOENIX CONTACT EN_Bro_Glossar_Netzwerktechnik_A6_Rev02.indd 2 26.05.14 15:26 Table of contents Glossary Pages 04 – 45 IEEE standards Pages 46 – 47 PHOENIX CONTACT 3 EN_Bro_Glossar_Netzwerktechnik_A6_Rev02.indd 3 26.05.14 15:26 Industrial Ethernet 10Base-T Standard for data transmission of 10 Mbps Ethernet using unshielded twisted pair cables (Category 3, 4 or 5). 100Base-FX Standard for data transmission of 100 Mbps Ethernet using fiber optic cables. 100Base-TX Standard for data transmission of 100 Mbps Ethernet using twisted pair cables (Category 5). Each connection is established via two wire pairs, one wire pair for “transmit data” and the other for “receive data”. 100Base-T Fast Ethernet; 100Base-T has been officially elevated to an IEEE standard as ITU 802.3u. This standard is essentially based on technologies for 10Base-T, the Ethernet version for twisted pair cables. There are several versions of 100Base-T, which differ with respect to the physical layer and therefore the transmission media: 100Base-TX, 100Base-T2, 100Base-T4, and 100Base-FX. With this method, the MAC level and therefore the conventional CSMA/CD access method are retained at a transmission speed of 100 Mbps. -

Microcomputers: NQS PUBLICATIONS Introduction to Features and Uses
of Commerce Computer Science National Bureau and Technology of Standards NBS Special Publication 500-110 Microcomputers: NQS PUBLICATIONS Introduction to Features and Uses QO IGf) .U57 500-110 NATIONAL BUREAU OF STANDARDS The National Bureau of Standards' was established by an act ot Congress on March 3, 1901. The Bureau's overall goal is to strengthen and advance the Nation's science and technology and facilitate their effective application for public benefit. To this end, the Bureau conducts research and provides; (1) a basis for the Nation's physical measurement system, (2) scientific and technological services for industry and government, (3) a technical basis for equity in trade, and (4) technical services to promote public safety. The Bureau's technical work is per- formed by the National Measurement Laboratory, the National Engineering Laboratory, and the Institute for Computer Sciences and Technology. THE NATIONAL MEASUREMENT LABORATORY provides the national system of physical and chemical and materials measurement; coordinates the system with measurement systems of other nations and furnishes essential services leading to accurate and uniform physical and chemical measurement throughout the Nation's scientific community, industry, and commerce; conducts materials research leading to improved methods of measurement, standards, and data on the properties of materials needed by industry, commerce, educational institutions, and Government; provides advisory and research services to other Government agencies; develops, produces, and -
Usb Laptop Console 2
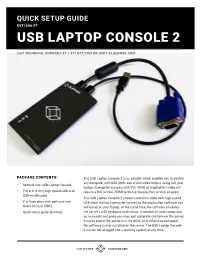
QUICK SETUP GUIDE KVT100A-FT USB LAPTOP CONSOLE 2 24/7 TECHNICAL SUPPORT AT 1.877.877.2269 OR VISIT BLACKBOX.COM PACKAGE CONTENTS: The USB Laptop Console 2 is an adapter which enables you to control any computer with USB ports and a VGA video output, using just your • Second-Gen USB Laptop Console laptop. (Computer systems with DVI, HDMI or DisplayPort video will • (1x) 6 ft.(1.8m) high speed USB-A to require a DVI to VGA, HDMI to VGA or DisplayPort to VGA adapter.) USB-miniB cable The USB Laptop Console 2 streams real-time video over high-speed • (1x) flash drive with software and USB, from the host computer (server) to the application software you Users Manual (PDF) will install on your laptop. At the same time, the software emulates • Quick setup guide (printed) the server’s USB keyboard and mouse. A window on your laptop acts as a console and gives you easy and complete control over the server. It works even if the server is in the BIOS, or is otherwise damaged. No software is ever installed on the server. The USB Laptop Console 2 can be hot-plugged into a working system at any time. 1.877.877.2269 BLACKBOX.COM NEED HELP? QUICK SETUP GUIDE LEAVE THE TECH TO US KVT100A-FT LIVE 24/7 TECHNICAL SUPPORT USB LAPTOP CONSOLE 2 1.877.877.2269 Software Installation: Before installing the software in a Windows or Apple computer, please ensure the USB Laptop Console 2 is DISCONNECTED. Cancel any “Add new hardware” dialog screens as these can interfere with the installation process. -
TIBCO Spotfire® Analyst Portable Software Release 10.4 2
TIBCO Spotfire® Analyst Portable Software Release 10.4 2 Important Information SOME TIBCO SOFTWARE EMBEDS OR BUNDLES OTHER TIBCO SOFTWARE. USE OF SUCH EMBEDDED OR BUNDLED TIBCO SOFTWARE IS SOLELY TO ENABLE THE FUNCTIONALITY (OR PROVIDE LIMITED ADD-ON FUNCTIONALITY) OF THE LICENSED TIBCO SOFTWARE. THE EMBEDDED OR BUNDLED SOFTWARE IS NOT LICENSED TO BE USED OR ACCESSED BY ANY OTHER TIBCO SOFTWARE OR FOR ANY OTHER PURPOSE. USE OF TIBCO SOFTWARE AND THIS DOCUMENT IS SUBJECT TO THE TERMS AND CONDITIONS OF A LICENSE AGREEMENT FOUND IN EITHER A SEPARATELY EXECUTED SOFTWARE LICENSE AGREEMENT, OR, IF THERE IS NO SUCH SEPARATE AGREEMENT, THE CLICKWRAP END USER LICENSE AGREEMENT WHICH IS DISPLAYED DURING DOWNLOAD OR INSTALLATION OF THE SOFTWARE (AND WHICH IS DUPLICATED IN THE LICENSE FILE) OR IF THERE IS NO SUCH SOFTWARE LICENSE AGREEMENT OR CLICKWRAP END USER LICENSE AGREEMENT, THE LICENSE(S) LOCATED IN THE “LICENSE” FILE(S) OF THE SOFTWARE. USE OF THIS DOCUMENT IS SUBJECT TO THOSE TERMS AND CONDITIONS, AND YOUR USE HEREOF SHALL CONSTITUTE ACCEPTANCE OF AND AN AGREEMENT TO BE BOUND BY THE SAME. ANY SOFTWARE ITEM IDENTIFIED AS THIRD PARTY LIBRARY IS AVAILABLE UNDER SEPARATE SOFTWARE LICENSE TERMS AND IS NOT PART OF A TIBCO PRODUCT. AS SUCH, THESE SOFTWARE ITEMS ARE NOT COVERED BY THE TERMS OF YOUR AGREEMENT WITH TIBCO, INCLUDING ANY TERMS CONCERNING SUPPORT, MAINTENANCE, WARRANTIES, AND INDEMNITIES. DOWNLOAD AND USE OF THESE ITEMS IS SOLELY AT YOUR OWN DISCRETION AND SUBJECT TO THE LICENSE TERMS APPLICABLE TO THEM. BY PROCEEDING TO DOWNLOAD, INSTALL OR USE ANY OF THESE ITEMS, YOU ACKNOWLEDGE THE FOREGOING DISTINCTIONS BETWEEN THESE ITEMS AND TIBCO PRODUCTS. -

Embedded ATMEL HTTP Server
Embedded ATMEL HTTP Server A Design Project Report Presented to the Engineering Division of the Graduate School of Cornell University in Partial Fulfillment of the Requirements for the Degree of Masters of Engineering (Electrical) by Tzeming Tan, Jeremy Project Advisor: Dr. Bruce R. Land Degree date: May 2004 Abstract Master of Electrical and Computer Engineering Program Cornell University Design Project Report Project Title: Embedded ATMEL HTTP Server Author: Tzeming Tan, Jeremy Abstract: The objective of this project was to design and build an embedded HTTP server using a microcontroller chip. The webserver required the implementation of the interface with Ethernet as well as several internet protocols such as TCP/IP and ARP. This embedded web server is able to serve small, static web pages as well as perform certain useful laboratory lab functions such as displaying the current temperature read by the microcontroller from a thermometer, on the webpage. While the capabilities of the embedded webserver are no where near that of a regular server computer, its small size and relatively low cost makes it more practical for some applications. The web server was built, tested to work, and a temperature reporting feature added to it. Report Approved by Project Advisor: ___________________________________ Date: __________ ii Executive Summary The internet is a versatile, convenient and efficient means of communication in the 21st century. Protocols such as TCP/IP, UDP, DHCP and ICMP form the backbone of internet communications a large bulk of which consists of Hyper Text Transfer Protocol (HTTP) traffic for the World Wide Web. A HTTP or web server is a server process running at a web site which sends out web pages in response to HTTP requests from remote browsers. -

Python Guide Documentation 0.0.1
Python Guide Documentation 0.0.1 Kenneth Reitz 2015 11 07 Contents 1 3 1.1......................................................3 1.2 Python..................................................5 1.3 Mac OS XPython.............................................5 1.4 WindowsPython.............................................6 1.5 LinuxPython...............................................8 2 9 2.1......................................................9 2.2...................................................... 15 2.3...................................................... 24 2.4...................................................... 25 2.5...................................................... 27 2.6 Logging.................................................. 31 2.7...................................................... 34 2.8...................................................... 37 3 / 39 3.1...................................................... 39 3.2 Web................................................... 40 3.3 HTML.................................................. 47 3.4...................................................... 48 3.5 GUI.................................................... 49 3.6...................................................... 51 3.7...................................................... 52 3.8...................................................... 53 3.9...................................................... 58 3.10...................................................... 59 3.11...................................................... 62