Research and Development of a Lowcost
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Download the User Manual and Keymander PC Software from Package Contents 1
TM Quick Start Guide KeyMander - Keyboard & Mouse Adapter for Game Consoles GE1337P PART NO. Q1257-d This Quick Start Guide is intended to cover basic setup and key functions to get you up and running quickly. For a complete explanation of features and full access to all KeyMander functions, please download the User Manual and KeyMander PC Software from www.IOGEAR.com/product/GE1337P Package Contents 1 1 x GE1337P KeyMander Controller Emulator 2 x USB A to USB Mini B Cables 1 x 3.5mm Data Cable (reserved for future use) 1 x Quick Start Guide 1 x Warranty Card System Requirements Hardware Game Consoles: • PlayStation® 4 • PlayStation® 3 • Xbox® One S • Xbox® One • Xbox® 360 Console Controller: • PlayStation® 4 Controller • PlayStation® 3 Dual Shock 3 Controller (REQUIRED)* • Xbox® 360 Wired Controller (REQUIRED)* • Xbox® One Controller with Micro USB cable (REQUIRED)* • USB keyboard & USB mouse** Computer with available USB 2.0 port OS • Windows Vista®, Windows® 7 and Windows® 8, Windows® 8.1 *Some aftermarket wired controllers do not function correctly with KeyMander. It is strongly recommended to use official PlayStation/Xbox wired controllers. **Compatible with select wireless keyboard/mouse devices. Overview 2 1. Gamepad port 1 2 3 2. Keyboard port 3. Mouse port 4. Turbo/Keyboard Mode LED Gamepad Keyboard Mouse Indicator: a. Lights solid ORANGE when Turbo Mode is ON b. Flashes ORANGE when Keyboard Mode is ON 5. Setting LED indicator: a. Lights solid BLUE when PC port is connected to a computer. b. Flashes (Fast) BLUE when uploading a profile from a computer to the KeyMander. -

English Sharkps3 Manual.Pdf
TM FRAGFX SHARK CLASSIC - WIRELESS CONTROLLER ENGLISH repaIR CONNECTION BETWEEN DONGLE AND MOUSE/CHUCK Should your dongle light up, but not connect to either mouse or chuck or both, the unit HAPPY FRAGGING! needs unpairing and pairing. This process should only have to be done once. Welcome and thank you for purchasing your new FragFX SHARK Classic for the Sony Playstation 3, PC and MAC. 1) unpair the mouse (switch OFF the Chuck): - Switch on the mouse The FragFX SHARK classic is specifically designed for the Sony PlayStation 3, PC / - Press R1, R2, mousewheel, start, G, A at the same time MAC and compatible with most games, however you may find it‘s best suited to shoo- - Switch the mouse off, and on again. The blue LED should now be blinking - The mouse is now unpaired, and ready to be paired again ting, action and sport games. To use your FragFX SHARK classic, you are expected to 2) pair the mouse have a working Sony PlayStation 3 console system. - (Switch on the mouse) - Insert the dongle into the PC or PS3 For more information visit our web site at www.splitfish.com. Please read the entire - Hold the mouse close (~10cm/~4inch) to the dongle, and press either F, R, A or instruction - you get most out of your FragFX SHARK classic. G button - The LED on the mouse should dim out and the green LED on the dongle should light Happy Fragging! - If not, repeat the procedure GET YOUR DONGLE READY 3) unpair the chuck (switch OFF the mouse): Select Platform Switch Position the Dongle - Switch on the chuck PS3 - ‘Gamepad mode’ for function as a game controller - Press F, L1, L2, select, FX, L3(press stick) at the same time - ‘Keyboard Mode’ for chat and browser only - Switch the chuck off, and on again. -

Video Game Control Dimensionality Analysis
http://www.diva-portal.org Postprint This is the accepted version of a paper presented at IE2014, 2-3 December 2014, Newcastle, Australia. Citation for the original published paper: Mustaquim, M., Nyström, T. (2014) Video Game Control Dimensionality Analysis. In: Blackmore, K., Nesbitt, K., and Smith, S.P. (ed.), Proceedings of the 2014 Conference on Interactive Entertainment (IE2014) New York: Association for Computing Machinery (ACM) http://dx.doi.org/10.1145/2677758.2677784 N.B. When citing this work, cite the original published paper. Permanent link to this version: http://urn.kb.se/resolve?urn=urn:nbn:se:uu:diva-234183 Video Game Control Dimensionality Analysis Moyen M. Mustaquim Tobias Nyström Uppsala University Uppsala University Uppsala, Sweden Uppsala, Sweden +46 (0) 70 333 51 46 +46 18 471 51 49 [email protected] [email protected] ABSTRACT notice that very few studies have concretely examined the effect In this paper we have studied the video games control of game controllers on game enjoyment [25]. A successfully dimensionality and its effects on the traditional way of designed controller can contribute in identifying different player interpreting difficulty and familiarity in games. This paper experiences by defining various types of games that have been presents the findings in which we have studied the Xbox 360 effortlessly played with a controller because of the controller’s console’s games control dimensionality. Multivariate statistical design [18]. One example is the Microsoft Xbox controller that operations were performed on the collected data from 83 different became a favorite among players when playing “first person- games of Xbox 360. -
Manual English.Pdf
Chapter 1 TABLE OF CONTENTS GETTING STARTED Chapter 1: Getting Started ...................................................................1 Operating Systems Chapter 2: Interactions & Classes ........................................................6 Chapter 3: School Supplies ...................................................................9 Windows XP Chapter 4: Bullworth Society .............................................................12 Windows Vista Chapter 5: Credits ..............................................................................16 Minimum System Requirements Memory: 1 GB RAM 4.7 GB of hard drive disc space Processor: Intel Pentium 4 (3+ GHZ) AMD Athlon 3000+ Video card: DirectX 9.0c Shader 3.0 supported Nvidia 6800 or 7300 or better ATI Radeon X1300 or better Sound card: DX9-compatible Installation You must have Administrator privileges to install and play Bully: Scholarship Edition. If you are unsure about how to achieve this, please consult your Windows system manual. Insert the Bully: Scholarship Edition DVD into your DVD-ROM Drive. If AutoPlay is enabled, the Launch Menu will appear otherwise use Explorer to browse the disc, and launch. ABOUT THIS BOOK Select the INSTALL option to run the installer. Since publishing the first edition there have been some exciting new Agree to the license Agreement. developments. This second edition has been updated to reflect those changes. You will also find some additional material has been added. Choose the install location: Entire chapters have been rewritten and some have simply been by default we use “C:\Program Files\Rockstar Games\Bully Scholarship deleted to streamline your learning experience. Enjoy! Edition” BULLY: SCHOLARSHIP EDITION CHAPTER 1: GETTING STARTED 1 Chapter 1 Installation continued CONTROLS Once Installation has finished, you will be returned to the Launch Menu. Controls: Standard If you do not have DirectX 9.0c installed on your PC, then we suggest Show Secondary Tasks Arrow Left launching DIRECTX INSTALL from the Launch Menu. -

The Trackball Controller: Improving the Analog Stick
The Trackball Controller: Improving the Analog Stick Daniel Natapov I. Scott MacKenzie Department of Computer Science and Engineering York University, Toronto, Canada {dnatapov, mack}@cse.yorku.ca ABSTRACT number of inputs was sufficient. Despite many future additions Two groups of participants (novice and advanced) completed a and improvements, the D-Pad persists on all standard controllers study comparing a prototype game controller to a standard game for all consoles introduced after the NES. controller for point-select tasks. The prototype game controller Shortcomings of the D-Pad became apparent with the introduction replaces the right analog stick of a standard game controller (used of 3D games. The Sony PlayStation and the Sega Saturn, for pointing and camera control) with a trackball. We used Fitts’ introduced in 1995, supported 3D environments and third-person law as per ISO 9241-9 to evaluate the pointing performance of perspectives. The controllers for those consoles, which used D- both controllers. In the novice group, the trackball controller’s Pads, were not well suited for 3D, since navigation was difficult. throughput was 2.69 bps – 60.1% higher than the 1.68 bps The main issue was that game characters could only move in eight observed for the standard controller. In the advanced group the directions using the D-Pad. To overcome this, some games, such trackball controller’s throughput was 3.19 bps – 58.7% higher than the 2.01 bps observed for the standard controller. Although as Resident Evil, used the forward and back directions of the D- the trackball controller performed better in terms of throughput, Pad to move the character, and the left and right directions for pointer path was more direct with the standard controller. -

Product Guide Version 1.1
Product Guide Version 1.1 Contents 1. Introduction ........................................................................................................................................... 2 2. Controls and Indicators ......................................................................................................................... 4 3. Setup and Operation ............................................................................................................................. 6 4. Mad Catz L.Y.N.X.3 App for Windows and Android .......................................................................... 10 5. Product Questions ............................................................................................................................... 36 1 1. Introduction The L.Y.N.X.3 takes the award winning design and functionality of the L.Y.N.X.9 and delivers a product for the mobile masses. This is a controller, designed to live with you, and work on as many devices as possible, whether at home, or on-the-go. The product contains all the controls needed for a core gaming experience on mobile phone and tablets running Android. For mobile gaming, the removable phone clip is ideal for grabbing some game time wherever you are. Whether you are on Android, or PC, gamers also have the freedom to tweak the response profiles of the sticks and triggers to suit their game. This is achieved via our free apps for both Android and Windows. L.Y.N.X.3 is not just about gaming. We understand that a customer’s smart device has become the centre of their world in terms of accessing social media and music, films and TV. The controller has two modes of operation. One for Gaming, the other for Media. When in Media mode the user can access full mouse cursor control with the left stick, and a host of media and mouse buttons for quick, intuitive control of your Android set-top-box or Windows Media PC. As well as Android-based phones and tablets, this controller can also function as an additional controller on the M.O.J.O. -

Gaming Keypad Manual
Gaming Keypad Manual MANUAL V4.0 TABLE OF CONTENTS 1. INTRODUCTION…………………………………………………………….. 2 2. FEATURES / PACKAGE CONTENTS…………………..………. 3 3. DEVICE LAYOUT…………………………………….………………………. 4 4. ADJUST YOUR AZERON KEYPAD………………..….………… 5 5. INSTALLING SOFTWARE………………..……………………………. 6 6. HOW TO USE AZERON SOFTWARE…………………….…… 12 6.1. CALIBRATING THUMBSTICK………...…………..….. 12 6.2. INTERFACE OVERVIEW…………………………………… 12 6.3. BUTTON SETUP……………………………….………………. 13 6.3.1. Keyboard mode………………..………………… 14 6.3.2. Xinput button and Xinput trigger……. 14 6.3.3. Mouse mode……………..……………………….. 15 6.3.4. Joystick button………………..…………………. 15 6.3.5. Joystick D-pad mode……….………………… 16 6.3.6. Toggle analog stick mode…………………. 16 6.3.7. Macro……………………………….…………………. 17 6.3.8. No action mode………………..……………….. 18 6.4. THUMBSTICK SETUP………….……..……………………. 19 6.5 PROFILES…………………………………………………………… 22 6.6 SOFTWARE OPTIONS (ABOUT PAGE)……………. 24 7. HOW TO UPDATE FIRMWARE MANUALLY..………..……….. 27 8. TIPS AND TRICKS……………………………………………………………….. 29 Page | 1 GAMING KEYPAD | Manual INTRODUCTION The Azeron gaming keypad is a simple Plug-and-Play controller that sets up easily with our software. It can function as a joystick or as a keyboard or in hybrid mode. The keypad comes with 24 - 26 programmable buttons and an analog thumbstick for complete control and maneuverability over your game. Its ergonomic wrist pad, adjustable key towers and adjustable thumb module delivers a perfect fit for your arm and minimized fatigue over extended gameplay. Page | 2 GAMING KEYPAD | Manual 1. FEATURES 19 programmable buttons on towers 7 programmable thumb buttons A programmable analog thumbstick Adjustable button positions to fit your hand Stable metal base with antislip silicon pads Braided tower cables 2 meter (6.5 feet) braided USB cable Programmable Teensy++ 2.0 brain Easy accessible reset button PACKAGE CONTENTS Page | 3 GAMING KEYPAD | Manual 2. -
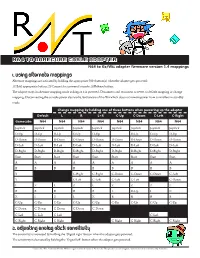
1. Using Alternate Mappings 2. Adjusting Analog Stick Sensitivity
N64 to Gamecube cable adapter N64 to Gc/Wii adapter firmware version 1.4 mappings 1. Using alternate mappings Alternate mappings are activated by holding the appropriate N64 button(s) when the adapter gets powered: 1) Hold appropriate button, 2) Connect to a powered console, 3) Release button. The adapter stays in alternate mapping mode as long as it is powered. Disconnect and reconnect to revert to default mapping or change mapping. Disconnecting the console power also works, but beware of the Wii which does not remove power from controllers in standby mode. Change mapping by holding one of these buttons when powering up the adapter Default L R L+R C-Up C-Down C-Left C-Right Gamecube N64 N64 N64 N64 N64 N64 N64 N64 Joystick Joystick Joystick Joystick Joystick Joystick Joystick Joystick Joystick D-Up D-Up D-Up D-Up D-Up D-Up D-Up D-Up D-Down D-Down D-Down D-Down D-Down D-Down D-Down D-Down D-Down D-Left D-Left D-Left D-Left D-Left D-Left D-Left D-Left D-Left D-Right D-Right D-Right D-Right D-Right D-Right D-Right D-Right D-Right Start Start Start Start Start Start Start Start Start A A A A A A A A A B B B B B B B B B X C-Right C-Right C-Down C-Down C-Down C-Left Y C-Left C-Left C-Left C-Left C-Down L Z L Z L Z Z Z L R R R R R L D-Up L Z Z L Z L Z R R R R C-Up C-Up C-Up C-Up C-Up C-Up C-Up C-Up C-Up C-Down C-Down C-Down C-Down C-Down C-Left C-Left C-Left C-Left C-Right C-Right C-Right C-Right C-Right C-Right C-Right 2. -
Analog Input in Gaming
Analog input in gaming: Investigating the possibilities of new controller affordances in video games Pim Ostendorf Interaction Design One-Year Master Thesis Project I KD643A 15.0 credits May 23, 2018 Supervisor: Per Linde 1 Acknowledgements I would like to start by thanking my friend, Johanna Westerlund, for her dedication in creating the sprite art required to create the prototype on such a short notice. I don’t want to think about the abominations I would have drawn up if she had not been able to help me out. Furthermore, I want to thank my friends at Spelenshus Malmö, who were willing to take time out of their day to playtest and discuss the prototype I created. My thanks also goes out to my classmates for their time and input in the experiments and playtesting. Also, my thanks to my supervisor, Per Linde for his enthusiasm, passion and his inexplicable ability to make me say things that sound clever. Last but not least my thanks go out to David Cuartielles for his input and advice when I got stuck. I hope your keyboards will turn out amazing. 2 Abstract This report covers the eight week design project for the Thesis Project 1 and it looks at both the process and the results of this project. Through an iterative prototyping process a prototype was created to answer the research question: “What gameplay mechanics are required for a fighting style video game to allow for analog input in its character movements and do these mechanics allow for more natural controls and mastery?” Together with research into academic writing in the fields of neurology, embodied design and game design it was concluded that an analog control scheme, within the context of a video game that allows for that type of affordance, gives the user more natural control over the character they are playing. -

Mixed-Reality Instrument Design for the Twenty-First Century Musician
Mixed-Reality Instrument Design for the Twenty-First Century Musician As we approach our 18th year in the 21st century, our musical traditions and perspectives continue to evolve, far beyond the musical forms and functionalities explored by our forefathers. Computer-based technologies, specifically the virtual and mixed reality platforms that grow more ubiquitous with every passing day, have afforded digital luthiers a rich multi-modal playground within which to experiment and create. New sensor technologies have evolved, allowing human performative gesture—long the hallmark of physical musical instrumental performance practice—to engage purely digital instruments. I’m Rob Hamilton, and for this issue of IEEE Computing Now entitled “Virtual Musical Instruments Using Sensor Technologies,” editors Roger Dannenberg and Timothy Shih have asked me to share my experiences as a composer, researcher, and performer, designing and developing virtual and mixed reality musical instruments and immersive experiences. My own practice of building virtual instruments began in an unlikely musical place—namely within the scope of video game design and development. Experienced gamers, much like trained musicians, exhibit characteristics of virtuosic control over multi-modal gaming systems. This ability, coupled with the dynamic creative possibilities and inherent collaborative nature of gaming platforms, led me to begin experimenting with hacking game modifications (or mods) to couple player control over avatar and gaming systems with real-time synthesis and sound-controlling engines. Some of these works blur the lines between game and musical system, while others, like Carillon— created with artist and designer Chris Platz—leverage gaming technologies, VR Head-Mounted Displays, and hand-tracking sensors to create something that we’d more clearly identify as a virtual reality instrument or VMI. -
Universal Game Controller
Universal Game Controller By Evan Lee Neil Singh Charles Van Fossan Final Report for ECE 445, Senior Design Spring 2017 TA: Eric Clark May 2017 Group 48 Abstract For any avid gamer, having multiple systems are a must, but the expense of having multiple controllers for each might create upkeep costs and clutter issues. Our Universal Gaming Controller addresses this problem by connecting to a Bluetooth console dongle that is able to connect to different types of consoles. By having a single controller that could work on multiple systems, the cost of being able to utilize the console the way it is supposed to be greatly diminishes. Our controllers should not exceed the cost of a normal commercial controller and the various dongles should be as inexpensive as possible so that buying new dongles does not have a large financial impact on the consumer. This way, consumers do not need to worry as much about the cost of getting the maximum amount of controllers for their consoles. 2 Contents 1 Introduction ................................................................................................................................................ 4 1.1 Objective ............................................................................................................................................. 4 1.2 Our Solution ........................................................................................................................................ 4 1.2 High Level Requirements .................................................................................................................. -

Gamepad Control for Industrial Robots New Ideas for the Improvement of Existing Control Devices
Gamepad Control for Industrial Robots New Ideas for the Improvement of Existing Control Devices Maximilian Wagner1, Dennis Avdic2 and Peter Heß2 1Nuremberg Campus of Technology, Nuremberg Institute of Technology, Further¨ Straße 246b, 90429 Nuremberg, Germany 2Department of Mechanical Engineering and Building Services Engineering, Nuremberg Institute of Technology, Keßlerplatz 12, 90489 Nuremberg, Germany Keywords: Gamepad, Industrial Robots, Robot Control Devices, Usability. Abstract: In the scope of this work, a frequently used gaming device—the gamepad—is investigated as a control device for industrial robots in order to extract new ideas for the improvement of existing control devices. Thus, an approach for the integration of a gamepad control in a common industrial robot system is developed and implemented. The usability of the gamepad control is improved by adding a smartphone to the gamepad, which serves as a display to show information to the user. Finally, the developed gamepad control is compared with the operation via conventional control device. 1 INTRODUCTION control is presented in Section 4. Only initial trends are pointed out because of a currently low number of The sales of industrial robots reached the highest level test candidates. Finally, Section 5 concludes the paper ever recorded in 2015 (IFR, International Federation with a short summary and an outlook to future work. of Robotics, 2015). At the same time, modern prod- ucts offer a lot of variety and diversity. Thus, small and varying batch sizes are in the focus. In doing so, 2 RELATED WORK a high flexibility becomes more important for indus- trial robot systems. This requires a quick and easy programming of the robots in order to lower the costs.