Multivariate Geometric Skew-Normal Distribution
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Use of Proc Iml to Calculate L-Moments for the Univariate Distributional Shape Parameters Skewness and Kurtosis
Statistics 573 USE OF PROC IML TO CALCULATE L-MOMENTS FOR THE UNIVARIATE DISTRIBUTIONAL SHAPE PARAMETERS SKEWNESS AND KURTOSIS Michael A. Walega Berlex Laboratories, Wayne, New Jersey Introduction Exploratory data analysis statistics, such as those Gaussian. Bickel (1988) and Van Oer Laan and generated by the sp,ge procedure PROC Verdooren (1987) discuss the concept of robustness UNIVARIATE (1990), are useful tools to characterize and how it pertains to the assumption of normality. the underlying distribution of data prior to more rigorous statistical analyses. Assessment of the As discussed by Glass et al. (1972), incorrect distributional shape of data is usually accomplished conclusions may be reached when the normality by careful examination of the values of the third and assumption is not valid, especially when one-tail tests fourth central moments, skewness and kurtosis. are employed or the sample size or significance level However, when the sample size is small or the are very small. Hopkins and Weeks (1990) also underlying distribution is non-normal, the information discuss the effects of highly non-normal data on obtained from the sample skewness and kurtosis can hypothesis testing of variances. Thus, it is apparent be misleading. that examination of the skewness (departure from symmetry) and kurtosis (deviation from a normal One alternative to the central moment shape statistics curve) is an important component of exploratory data is the use of linear combinations of order statistics (L analyses. moments) to examine the distributional shape characteristics of data. L-moments have several Various methods to estimate skewness and kurtosis theoretical advantages over the central moment have been proposed (MacGillivray and Salanela, shape statistics: Characterization of a wider range of 1988). -

A Skew Extension of the T-Distribution, with Applications
J. R. Statist. Soc. B (2003) 65, Part 1, pp. 159–174 A skew extension of the t-distribution, with applications M. C. Jones The Open University, Milton Keynes, UK and M. J. Faddy University of Birmingham, UK [Received March 2000. Final revision July 2002] Summary. A tractable skew t-distribution on the real line is proposed.This includes as a special case the symmetric t-distribution, and otherwise provides skew extensions thereof.The distribu- tion is potentially useful both for modelling data and in robustness studies. Properties of the new distribution are presented. Likelihood inference for the parameters of this skew t-distribution is developed. Application is made to two data modelling examples. Keywords: Beta distribution; Likelihood inference; Robustness; Skewness; Student’s t-distribution 1. Introduction Student’s t-distribution occurs frequently in statistics. Its usual derivation and use is as the sam- pling distribution of certain test statistics under normality, but increasingly the t-distribution is being used in both frequentist and Bayesian statistics as a heavy-tailed alternative to the nor- mal distribution when robustness to possible outliers is a concern. See Lange et al. (1989) and Gelman et al. (1995) and references therein. It will often be useful to consider a further alternative to the normal or t-distribution which is both heavy tailed and skew. To this end, we propose a family of distributions which includes the symmetric t-distributions as special cases, and also includes extensions of the t-distribution, still taking values on the whole real line, with non-zero skewness. Let a>0 and b>0be parameters. -

A Study of Non-Central Skew T Distributions and Their Applications in Data Analysis and Change Point Detection
A STUDY OF NON-CENTRAL SKEW T DISTRIBUTIONS AND THEIR APPLICATIONS IN DATA ANALYSIS AND CHANGE POINT DETECTION Abeer M. Hasan A Dissertation Submitted to the Graduate College of Bowling Green State University in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY August 2013 Committee: Arjun K. Gupta, Co-advisor Wei Ning, Advisor Mark Earley, Graduate Faculty Representative Junfeng Shang. Copyright c August 2013 Abeer M. Hasan All rights reserved iii ABSTRACT Arjun K. Gupta, Co-advisor Wei Ning, Advisor Over the past three decades there has been a growing interest in searching for distribution families that are suitable to analyze skewed data with excess kurtosis. The search started by numerous papers on the skew normal distribution. Multivariate t distributions started to catch attention shortly after the development of the multivariate skew normal distribution. Many researchers proposed alternative methods to generalize the univariate t distribution to the multivariate case. Recently, skew t distribution started to become popular in research. Skew t distributions provide more flexibility and better ability to accommodate long-tailed data than skew normal distributions. In this dissertation, a new non-central skew t distribution is studied and its theoretical properties are explored. Applications of the proposed non-central skew t distribution in data analysis and model comparisons are studied. An extension of our distribution to the multivariate case is presented and properties of the multivariate non-central skew t distri- bution are discussed. We also discuss the distribution of quadratic forms of the non-central skew t distribution. In the last chapter, the change point problem of the non-central skew t distribution is discussed under different settings. -

Approaching Mean-Variance Efficiency for Large Portfolios
Approaching Mean-Variance Efficiency for Large Portfolios ∗ Mengmeng Ao† Yingying Li‡ Xinghua Zheng§ First Draft: October 6, 2014 This Draft: November 11, 2017 Abstract This paper studies the large dimensional Markowitz optimization problem. Given any risk constraint level, we introduce a new approach for estimating the optimal portfolio, which is developed through a novel unconstrained regression representation of the mean-variance optimization problem, combined with high-dimensional sparse regression methods. Our estimated portfolio, under a mild sparsity assumption, asymptotically achieves mean-variance efficiency and meanwhile effectively controls the risk. To the best of our knowledge, this is the first time that these two goals can be simultaneously achieved for large portfolios. The superior properties of our approach are demonstrated via comprehensive simulation and empirical studies. Keywords: Markowitz optimization; Large portfolio selection; Unconstrained regression, LASSO; Sharpe ratio ∗Research partially supported by the RGC grants GRF16305315, GRF 16502014 and GRF 16518716 of the HKSAR, and The Fundamental Research Funds for the Central Universities 20720171073. †Wang Yanan Institute for Studies in Economics & Department of Finance, School of Economics, Xiamen University, China. [email protected] ‡Hong Kong University of Science and Technology, HKSAR. [email protected] §Hong Kong University of Science and Technology, HKSAR. [email protected] 1 1 INTRODUCTION 1.1 Markowitz Optimization Enigma The groundbreaking mean-variance portfolio theory proposed by Markowitz (1952) contin- ues to play significant roles in research and practice. The optimal mean-variance portfolio has a simple explicit expression1 that only depends on two population characteristics, the mean and the covariance matrix of asset returns. Under the ideal situation when the underlying mean and covariance matrix are known, mean-variance investors can easily compute the optimal portfolio weights based on their preferred level of risk. -

A Family of Skew-Normal Distributions for Modeling Proportions and Rates with Zeros/Ones Excess
S S symmetry Article A Family of Skew-Normal Distributions for Modeling Proportions and Rates with Zeros/Ones Excess Guillermo Martínez-Flórez 1, Víctor Leiva 2,* , Emilio Gómez-Déniz 3 and Carolina Marchant 4 1 Departamento de Matemáticas y Estadística, Facultad de Ciencias Básicas, Universidad de Córdoba, Montería 14014, Colombia; [email protected] 2 Escuela de Ingeniería Industrial, Pontificia Universidad Católica de Valparaíso, 2362807 Valparaíso, Chile 3 Facultad de Economía, Empresa y Turismo, Universidad de Las Palmas de Gran Canaria and TIDES Institute, 35001 Canarias, Spain; [email protected] 4 Facultad de Ciencias Básicas, Universidad Católica del Maule, 3466706 Talca, Chile; [email protected] * Correspondence: [email protected] or [email protected] Received: 30 June 2020; Accepted: 19 August 2020; Published: 1 September 2020 Abstract: In this paper, we consider skew-normal distributions for constructing new a distribution which allows us to model proportions and rates with zero/one inflation as an alternative to the inflated beta distributions. The new distribution is a mixture between a Bernoulli distribution for explaining the zero/one excess and a censored skew-normal distribution for the continuous variable. The maximum likelihood method is used for parameter estimation. Observed and expected Fisher information matrices are derived to conduct likelihood-based inference in this new type skew-normal distribution. Given the flexibility of the new distributions, we are able to show, in real data scenarios, the good performance of our proposal. Keywords: beta distribution; centered skew-normal distribution; maximum-likelihood methods; Monte Carlo simulations; proportions; R software; rates; zero/one inflated data 1. -

Random Processes
Chapter 6 Random Processes Random Process • A random process is a time-varying function that assigns the outcome of a random experiment to each time instant: X(t). • For a fixed (sample path): a random process is a time varying function, e.g., a signal. – For fixed t: a random process is a random variable. • If one scans all possible outcomes of the underlying random experiment, we shall get an ensemble of signals. • Random Process can be continuous or discrete • Real random process also called stochastic process – Example: Noise source (Noise can often be modeled as a Gaussian random process. An Ensemble of Signals Remember: RV maps Events à Constants RP maps Events à f(t) RP: Discrete and Continuous The set of all possible sample functions {v(t, E i)} is called the ensemble and defines the random process v(t) that describes the noise source. Sample functions of a binary random process. RP Characterization • Random variables x 1 , x 2 , . , x n represent amplitudes of sample functions at t 5 t 1 , t 2 , . , t n . – A random process can, therefore, be viewed as a collection of an infinite number of random variables: RP Characterization – First Order • CDF • PDF • Mean • Mean-Square Statistics of a Random Process RP Characterization – Second Order • The first order does not provide sufficient information as to how rapidly the RP is changing as a function of timeà We use second order estimation RP Characterization – Second Order • The first order does not provide sufficient information as to how rapidly the RP is changing as a function -

“Mean”? a Review of Interpreting and Calculating Different Types of Means and Standard Deviations
pharmaceutics Review What Does It “Mean”? A Review of Interpreting and Calculating Different Types of Means and Standard Deviations Marilyn N. Martinez 1,* and Mary J. Bartholomew 2 1 Office of New Animal Drug Evaluation, Center for Veterinary Medicine, US FDA, Rockville, MD 20855, USA 2 Office of Surveillance and Compliance, Center for Veterinary Medicine, US FDA, Rockville, MD 20855, USA; [email protected] * Correspondence: [email protected]; Tel.: +1-240-3-402-0635 Academic Editors: Arlene McDowell and Neal Davies Received: 17 January 2017; Accepted: 5 April 2017; Published: 13 April 2017 Abstract: Typically, investigations are conducted with the goal of generating inferences about a population (humans or animal). Since it is not feasible to evaluate the entire population, the study is conducted using a randomly selected subset of that population. With the goal of using the results generated from that sample to provide inferences about the true population, it is important to consider the properties of the population distribution and how well they are represented by the sample (the subset of values). Consistent with that study objective, it is necessary to identify and use the most appropriate set of summary statistics to describe the study results. Inherent in that choice is the need to identify the specific question being asked and the assumptions associated with the data analysis. The estimate of a “mean” value is an example of a summary statistic that is sometimes reported without adequate consideration as to its implications or the underlying assumptions associated with the data being evaluated. When ignoring these critical considerations, the method of calculating the variance may be inconsistent with the type of mean being reported. -

Approximating the Distribution of the Product of Two Normally Distributed Random Variables
S S symmetry Article Approximating the Distribution of the Product of Two Normally Distributed Random Variables Antonio Seijas-Macías 1,2 , Amílcar Oliveira 2,3 , Teresa A. Oliveira 2,3 and Víctor Leiva 4,* 1 Departamento de Economía, Universidade da Coruña, 15071 A Coruña, Spain; [email protected] 2 CEAUL, Faculdade de Ciências, Universidade de Lisboa, 1649-014 Lisboa, Portugal; [email protected] (A.O.); [email protected] (T.A.O.) 3 Departamento de Ciências e Tecnologia, Universidade Aberta, 1269-001 Lisboa, Portugal 4 Escuela de Ingeniería Industrial, Pontificia Universidad Católica de Valparaíso, Valparaíso 2362807, Chile * Correspondence: [email protected] or [email protected] Received: 21 June 2020; Accepted: 18 July 2020; Published: 22 July 2020 Abstract: The distribution of the product of two normally distributed random variables has been an open problem from the early years in the XXth century. First approaches tried to determinate the mathematical and statistical properties of the distribution of such a product using different types of functions. Recently, an improvement in computational techniques has performed new approaches for calculating related integrals by using numerical integration. Another approach is to adopt any other distribution to approximate the probability density function of this product. The skew-normal distribution is a generalization of the normal distribution which considers skewness making it flexible. In this work, we approximate the distribution of the product of two normally distributed random variables using a type of skew-normal distribution. The influence of the parameters of the two normal distributions on the approximation is explored. When one of the normally distributed variables has an inverse coefficient of variation greater than one, our approximation performs better than when both normally distributed variables have inverse coefficients of variation less than one. -

Convergence in Distribution Central Limit Theorem
Convergence in Distribution Central Limit Theorem Statistics 110 Summer 2006 Copyright °c 2006 by Mark E. Irwin Convergence in Distribution Theorem. Let X » Bin(n; p) and let ¸ = np, Then µ ¶ n e¡¸¸x lim P [X = x] = lim px(1 ¡ p)n¡x = n!1 n!1 x x! So when n gets large, we can approximate binomial probabilities with Poisson probabilities. Proof. µ ¶ µ ¶ µ ¶ µ ¶ n n ¸ x ¸ n¡x lim px(1 ¡ p)n¡x = lim 1 ¡ n!1 x n!1 x n n µ ¶ µ ¶ µ ¶ n! 1 ¸ ¡x ¸ n = ¸x 1 ¡ 1 ¡ x!(n ¡ x)! nx n n Convergence in Distribution 1 µ ¶ µ ¶ µ ¶ n! 1 ¸ ¡x ¸ n = ¸x 1 ¡ 1 ¡ x!(n ¡ x)! nx n n µ ¶ ¸x n! 1 ¸ n = lim 1 ¡ x! n!1 (n ¡ x)!(n ¡ ¸)x n | {z } | {z } !1 !e¡¸ e¡¸¸x = x! 2 Note that approximation works better when n is large and p is small as can been seen in the following plot. If p is relatively large, a di®erent approximation should be used. This is coming later. (Note in the plot, bars correspond to the true binomial probabilities and the red circles correspond to the Poisson approximation.) Convergence in Distribution 2 lambda = 1 n = 10 p = 0.1 lambda = 1 n = 50 p = 0.02 lambda = 1 n = 200 p = 0.005 p(x) p(x) p(x) 0.0 0.1 0.2 0.3 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0 1 2 3 4 0 1 2 3 4 0 1 2 3 4 x x x lambda = 5 n = 10 p = 0.5 lambda = 5 n = 50 p = 0.1 lambda = 5 n = 200 p = 0.025 p(x) p(x) p(x) 0.00 0.05 0.10 0.15 0.20 0.00 0.05 0.10 0.15 0.00 0.05 0.10 0.15 0 1 2 3 4 5 6 7 8 9 0 2 4 6 8 10 12 0 2 4 6 8 10 12 x x x Convergence in Distribution 3 Example: Let Y1;Y2;::: be iid Exp(1). -

Basic Statistics and Monte-Carlo Method -2
Applied Statistical Mechanics Lecture Note - 10 Basic Statistics and Monte-Carlo Method -2 고려대학교 화공생명공학과 강정원 Table of Contents 1. General Monte Carlo Method 2. Variance Reduction Techniques 3. Metropolis Monte Carlo Simulation 1.1 Introduction Monte Carlo Method Any method that uses random numbers Random sampling the population Application • Science and engineering • Management and finance For given subject, various techniques and error analysis will be presented Subject : evaluation of definite integral b I = ρ(x)dx a 1.1 Introduction Monte Carlo method can be used to compute integral of any dimension d (d-fold integrals) Error comparison of d-fold integrals Simpson’s rule,… E ∝ N −1/ d − Monte Carlo method E ∝ N 1/ 2 purely statistical, not rely on the dimension ! Monte Carlo method WINS, when d >> 3 1.2 Hit-or-Miss Method Evaluation of a definite integral b I = ρ(x)dx a h X X X ≥ ρ X h (x) for any x X Probability that a random point reside inside X O the area O O I N' O O r = ≈ O O (b − a)h N a b N : Total number of points N’ : points that reside inside the region N' I ≈ (b − a)h N 1.2 Hit-or-Miss Method Start Set N : large integer N’ = 0 h X X X X X Choose a point x in [a,b] = − + X Loop x (b a)u1 a O N times O O y = hu O O Choose a point y in [0,h] 2 O O a b if [x,y] reside inside then N’ = N’+1 I = (b-a) h (N’/N) End 1.2 Hit-or-Miss Method Error Analysis of the Hit-or-Miss Method It is important to know how accurate the result of simulations are The rule of 3σ’s Identifying Random Variable N = 1 X X n N n=1 From -
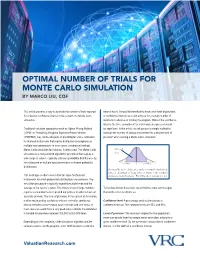
Monte Carlo Simulation by Marco Liu, Cqf
OPTIMAL NUMBER OF TRIALS FOR MONTE CARLO SIMULATION BY MARCO LIU, CQF This article presents a way to estimate the number of trials required several hours. It would be beneficial to know what level of precision, for a desired confidence interval in the context of a Monte Carlo or confidence interval, we could achieve for a certain number of simulation. iterations in advance of running the program. Without the confidence interval, the time commitment for a trial-and-error process would Traditional valuation approaches such as Option Pricing Method be significant. In this article, we will present a simple method to (“OPM”) or Probability-Weighted Expected Return Method estimate the number of simulations needed for a desired level of (“PWERM”) may not be adequate in providing fair value estimation precision when running a Monte Carlo simulation. for financial instruments that require distribution assumptions on multiple input parameters. In such cases, a numerical method, Monte Carlo simulation for instance, is often used. The Monte Carlo 95% of simulation is a computerized algorithmic procedure that outputs a area wide range of values – typically unknown probability distribution – by simulating one or multiple input parameters via known probability distributions. Statistically, 95% of the area under a normal distribution curve is described as being plus or minus 1.96 standard This technique is often used to find fair value for financial deviations from the mean. For 90%, the z-statistic is 1.64. instruments for which probabilistic distributions are unknown. The simulation procedure is typically repeated multiple times and the average of the results is taken. -

Copulaesque Versions of the Skew-Normal Andskew-Student
S S symmetry Article Copulaesque Versions of the Skew-Normal and Skew-Student Distributions Christopher Adcock Sheffield University Management School, University College Dublin, Sheffield S10 1FL, UK; c.j.adcock@sheffield.ac.uk Abstract: A recent paper presents an extension of the skew-normal distribution which is a copula. Under this model, the standardized marginal distributions are standard normal. The copula itself depends on the familiar skewing construction based on the normal distribution function. This paper is concerned with two topics. First, the paper presents a number of extensions of the skew-normal copula. Notably these include a case in which the standardized marginal distributions are Student’s t, with different degrees of freedom allowed for each margin. In this case the skewing function need not be the distribution function for Student’s t, but can depend on certain of the special functions. Secondly, several multivariate versions of the skew-normal copula model are presented. The paper contains several illustrative examples. Keywords: copula; multivariate distributions; skew-normal distributions; skew-Student distributions JEL Classification: C18; G01; G10; G12 Citation: Adcock, C.J. Copulaesque 1. Introduction Versions of the Skew-Normal and The recent paper by [1] presents an extension of the skew-normal distribution which Skew-Student Distributions. has subsequently been referred to as a copula. Under this model, the standardized marginal Symmetry 2021, 13, 815. https:// distributions are standard normal and some of the conditional distributions are skew- doi.org/10.3390/sym13050815 normal.The skew-normal distribution itself was introduced in two landmark papers [2] and [3]. These papers have led to a very substantial research effort by numerous authors Academic Editor: Nicola Maria over the last thirty five years.