Performance of Single Board Computers for Vision Processing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Setting up Odroid C2 – Throughtput Testing
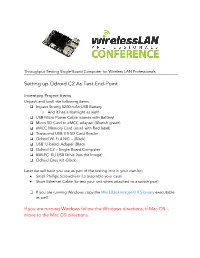
Throughput Testing Single-Board Computer for Wireless LAN Professionals Setting up Odroid C2 As Test End-Point Inventory Project Items Unpack and knoll the following items ❑ Impact Strong 5200 mAh USB Battery o And it has a flashlight as well! ❑ USB Micro Power Cable (comes with Battery) ❑ Micro SD Card to eMCC adapter (Blueish green) ❑ eMCC Memory Card (small with Red label) ❑ Transcend USB 3.0 SD Card Reader ❑ Odroid Wi-Fi 4 NIC – (Black) ❑ USB ‘U-bend’ Adaper (Black ❑ Odroid C2 – Single Board Computer ❑ #WLPC_EU USB Drive (has the Image) ❑ Odroid Case Kit (Black) Later we will have you use as part of the testing (not in your own kit) • Small Phillips Screwdriver (to assemble your case) • Short Ethernet Cable (to test your unit when attached to a switch port) ❑ If you are running Windows copy the Win32DiskImager-0.9.5-binary executable as well. If you are running Windows follow the Windows directions, if Mac OS – move to the Mac OS directions. Mac OS Version Configure Image ❑ Copy Image File from the #WLPC_EU USB drive (in the Odroid for #WLPC_EU folder) to your Desktop… the file name is DietPi_v133_OdroidC2-arm64- (WLAN_PRO) ❑ Open Image File – Boot Drive ❑ Should have a Folder Call “Boot” ❑ Find the dietpi.txt We are changing setting so your Odroid device can join a local SSID and download more files we’ll need. ❑ Under the Wi-Fi Details section change the Wi-Fi SSID to WLPC_EU-01 with a PSK of password. #Enter your Wifi details below, if applicable (Case Sensitive). Wifi_SSID=WLPC_EU-01 Wifi_KEY=password ❑ Under WiFi Hotspot Settings, -
Improving the Beaglebone Board with Embedded Ubuntu, Enhanced GPMC Driver and Python for Communication and Graphical Prototypes
Final Master Thesis Improving the BeagleBone board with embedded Ubuntu, enhanced GPMC driver and Python for communication and graphical prototypes By RUBÉN GONZÁLEZ MUÑOZ Directed by MANUEL M. DOMINGUEZ PUMAR FINAL MASTER THESIS 30 ECTS, JULY 2015, ELECTRICAL AND ELECTRONICS ENGINEERING Abstract Abstract BeagleBone is a low price, small size Linux embedded microcomputer with a full set of I/O pins and processing power for real-time applications, also expandable with cape pluggable boards. The current work has been focused on improving the performance of this board. In this case, the BeagleBone comes with a pre-installed Angstrom OS and with a cape board using a particular software “overlay” and applications. Due to a lack of support, this pre-installed OS has been replaced by Ubuntu. As a consequence, the cape software and applications need to be adapted. Another necessity that emerges from the stated changes is to improve the communications through a GPMC interface. The depicted driver has been built for the new system as well as synchronous variants, also developed and tested. Finally, a set of applications in Python using the cape functionalities has been developed. Some extra graphical features have been included as example. Contents Contents Abstract ..................................................................................................................................................................................... 5 List of figures ......................................................................................................................................................................... -

User Manual - S.USV Solutions Compatible with Raspberry Pi, up Board and Tinker Board Revision 2.2 | Date 07.06.2018
User Manual - S.USV solutions Compatible with Raspberry Pi, UP Board and Tinker Board Revision 2.2 | Date 07.06.2018 User Manual - S.USV solutions / Revision 2.0 Table of Contents 1 Functions .............................................................................................................................................. 3 2 Technical Specification ........................................................................................................................ 4 2.1 Overview ....................................................................................................................................... 5 2.2 Performance .................................................................................................................................. 6 2.3 Lighting Indicators ......................................................................................................................... 6 3 Installation Guide................................................................................................................................. 7 3.1 Hardware ...................................................................................................................................... 7 3.1.1 Commissioning S.USV ............................................................................................................ 7 3.1.2 Connecting the battery .......................................................................................................... 8 3.1.3 Connecting the external power supply ................................................................................. -

Performance Analysis and Optimization Opportunities for NVIDIA Automotive Gpus
Performance Analysis and Optimization Opportunities for NVIDIA Automotive GPUs Hamid Tabani∗, Fabio Mazzocchetti∗y, Pedro Benedicte∗y, Jaume Abella∗ and Francisco J. Cazorla∗ ∗ Barcelona Supercomputing Center y Universitat Politecnica` de Catalunya Abstract—Advanced Driver Assistance Systems (ADAS) and products such as Renesas R-Car H3 [1], NVIDIA Jetson Autonomous Driving (AD) bring unprecedented performance TX2 [20] and NVIDIA Jetson Xavier [35], [27] have already requirements for automotive systems. Graphic Processing Unit reached the market building upon GPU technology inherited (GPU) based platforms have been deployed with the aim of meeting these requirements, being NVIDIA Jetson TX2 and from the high-performance domain. Automotive GPUs have its high-performance successor, NVIDIA AGX Xavier, relevant inherited designs devised for the high-performance domain representatives. However, to what extent high-performance GPU with the aim of reducing costs in the design, verification and configurations are appropriate for ADAS and AD workloads validation process for chip manufacturers. remains as an open question. Unfortunately, reusability of high-performance hardware This paper analyzes this concern and provides valuable does not consider GPUs efficiency in the automotive domain insights on this question by modeling two recent automotive NVIDIA GPU-based platforms, namely TX2 and AGX Xavier. In and, to the best of our knowledge, the design space for GPUs, particular, our work assesses their microarchitectural parameters where resources are sized with the aim of optimizing specific against relevant benchmarks, identifying GPU setups delivering goals such as performance, has not been yet thoroughly increased performance within a similar cost envelope, or decreas- performed for the automotive domain. ing hardware costs while preserving original performance levels. -

Suzanne's Microcluster Slides
csinparallel.org Microclusters for teaching PDC Suzanne J. Matthews (West Point) 1 csinparallel.org What is a Microcluster? • A personal, highly portable Beowulf cluster • Enables highly interactive and tactile experiential learning • Notable early examples: – Ultimate Linux Lunch Box (Ron Minnich and Mitch Williams, Sandia National Labs) – LittleFe (Charlie Peck, Earlham College) – Microwulf (Joel Adams, Calvin College) 2 csinparallel.org Single Board Computers (SBCs) 3 csinparallel.org Student Pi (West Point) Suzanne J. Matthews Raspberry Pi nodes - Prototype: Raspberry Pi B nodes - Initial: Raspberry Pi B+ nodes - Current: Raspberry Pi 2 nodes - 900 Mhz quad-core CPU, 1 GB of RAM, HDMI, USB, 10/100 Ethernet - Raspbian Linux June 2014 - ~$40 p/node - Materials: - http://suzannejmatthews.com/private/cluster.html October 2014 May 2016 4 csinparallel.org Student Parallella (West Point) Suzanne J. Matthews Parallella nodes - dual-core ARM A9 CPU, 16-core Epiphany co-processor, 1 GB of RAM, μHDMI, μUSB, Gigabit Ethernet - Linaro Linux - ~$145 p/node - Materials: - http://suzannejmatthews.com/private/cluster.html - http://suzannejmatthews.github.io/ October 2014 April 2016 January 2015 5 csinparallel.org Half ShoeBox Clusters (Centre College) David Toth Cubieboard/ODROID nodes (2-node clusters) - Prototype: Cubieboard2: dual-core ARM Cortex A7, 1 GB of RAM, HDMI, USB, 10/100 Ethernet - Latest: ODROID C2: 2Ghz quad-core A53, 2 GB of RAM, HDMI, USB, Gigabit Ethernet, - Android/Ubuntu Linux - ~ $150-$200 p/cluster - Materials: Early 2014 - http://web.centre.edu/david.toth/portablecluster/index.html -
A Highly Modular Router Microarchitecture for Networks-On-Chip
A Highly Modular Router Microarchitecture for Networks-on-Chip Item Type text; Electronic Dissertation Authors Wu, Wo-Tak Publisher The University of Arizona. Rights Copyright © is held by the author. Digital access to this material is made possible by the University Libraries, University of Arizona. Further transmission, reproduction, presentation (such as public display or performance) of protected items is prohibited except with permission of the author. Download date 01/10/2021 08:12:16 Link to Item http://hdl.handle.net/10150/631277 A HIGHLY MODULAR ROUTER MICROARCHITECTURE FOR NETWORKS-ON-CHIP by Wo-Tak Wu Copyright c Wo-Tak Wu 2019 A Dissertation Submitted to the Faculty of the DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING In Partial Fulfillment of the Requirements For the Degree of DOCTOR OF PHILOSOPHY In the Graduate College THE UNIVERSITY OF ARIZONA 2019 THE UNIVERSITY OF ARIZONA GRADUATE COLLEGE As members of the Dissertation Committee, we certify that we have read the dissertation prepared by Wo-Tak Wu, titled A HIGHLY MODULAR ROUTER MICROARCHITECTURE FOR NETWORKS-ON-CHIP and recommend that it be accepted as fulfilling the dissertation requirement for the Degree of Doctor of Philosophy. Dr. Linda Powers --~-__:::::____ ---?---- _________ Date: August 7, 2018 Dr. Roman Lysecky Final approval and acceptance of this dissertation is contingent upon the candidate's submission of the final copies of the dissertation to the Graduate College. I hereby certify that I have read this dissertation prepared under my direction and recommend that it be accepted as fulfilling the dissertation requirement. _____(/2 __·...... ~"--------\;-~=--------- · __ Date: August 7, 2018 Dissertation Director: Dr. -

DM3730, DM3725 Digital Media Processors Datasheet (Rev. D)
DM3730, DM3725 www.ti.com SPRS685D–AUGUST 2010–REVISED JULY 2011 DM3730, DM3725 Digital Media Processors Check for Samples: DM3730, DM3725 1 DM3730, DM3725 Digital Media Processors 1.1 Features 123456 • DM3730/25 Digital Media Processors: • Load-Store Architecture With – Compatible with OMAP™ 3 Architecture Non-Aligned Support – ARM® Microprocessor (MPU) Subsystem • 64 32-Bit General-Purpose Registers • Up to 1-GHz ARM® Cortex™-A8 Core • Instruction Packing Reduces Code Size Also supports 300, 600, and 800-MHz • All Instructions Conditional operation • Additional C64x+TM Enhancements • NEON™ SIMD Coprocessor – Protected Mode Operation – High Performance Image, Video, Audio – Expectations Support for Error (IVA2.2TM) Accelerator Subsystem Detection and Program Redirection • Up to 800-MHz TMS320C64x+TM DSP Core – Hardware Support for Modulo Loop Also supports 260, 520, and 660-MHz Operation operation – C64x+TM L1/L2 Memory Architecture • Enhanced Direct Memory Access (EDMA) • 32K-Byte L1P Program RAM/Cache Controller (128 Independent Channels) (Direct Mapped) • Video Hardware Accelerators • 80K-Byte L1D Data RAM/Cache (2-Way – POWERVR SGX™ Graphics Accelerator Set- Associative) (DM3730 only) • 64K-Byte L2 Unified Mapped RAM/Cache • Tile Based Architecture Delivering up to (4- Way Set-Associative) 20 MPoly/sec • 32K-Byte L2 Shared SRAM and 16K-Byte • Universal Scalable Shader Engine: L2 ROM Multi-threaded Engine Incorporating Pixel – C64x+TM Instruction Set Features and Vertex Shader Functionality • Byte-Addressable (8-/16-/32-/64-Bit Data) -

Passmark - Android Device List
PassMark - Android Device List https://www.androidbenchmark.net/device_list.php AndroidTM Benchmarks Performance Comparison of Android Devices Below is an alphabetical list of all Android device types that appear in the charts. Clicking on a specific device name will take you to the charts where it appears in and will highlight it for you. PassMark Rating CPUMark Rating PassMark Rank Android Device Type Samples (higher is better) (higher is better) (lower is better) 4G R17S 1,572 4,088 1253 1 A-gold BV9500Plus 5,052 13,068 375 1 A-gold BV9800 4,450 11,400 487 1 A-gold F1 4,237 10,869 531 7 A-gold S3_Pro 4,392 11,219 504 2 A-gold Z2_PRO 4,406 11,246 499 1 A1 Alpha 20+ 4,753 12,266 435 1 Acer A3-A40 1,982 5,269 1082 1 Acer AO722 519 1,272 1725 1 1 z 62 2020-10-14, 12:02 PassMark - Android Device List https://www.androidbenchmark.net/device_list.php PassMark Rating CPUMark Rating PassMark Rank Android Device Type Samples (higher is better) (higher is better) (lower is better) AGM A10 2,030 8,521 1066 1 ALCATEL A574BL 497 1,202 1736 1 AlcatelOneTouch Alcatel_5044R 438 1,129 1759 1 Alco CT9223W97 1,214 3,111 1384 1 ALLDOCUBE M8 2,730 7,274 882 5 ALLDOCUBE T701 1,092 4,554 1437 1 ALLDOCUBE U1006H 1,902 4,931 1125 1 ALLVIEW P7_PRO 1,691 4,543 1210 1 ALLVIEW X4_Soul 2,536 6,938 925 1 Alps Acer One 8 T4-82L 2,539 6,526 924 1 Alps Tablet18T 1,201 3,043 1394 1 Alps tb8788p1_64_bsp 2,343 5,784 983 2 Amazon KFKAWI 712 1,701 1589 4 Amazon KFMAWI 2,306 5,640 992 19 Amazon KFONWI 1,082 2,588 1442 3 Amlogic A95X-A3 1,228 3,182 1381 1 Amlogic ABOX A4 397 -

A Low-Cost Deep Neural Network-Based Autonomous Car
DeepPicar: A Low-cost Deep Neural Network-based Autonomous Car Michael G. Bechtely, Elise McEllhineyy, Minje Kim?, Heechul Yuny y University of Kansas, USA. fmbechtel, elisemmc, [email protected] ? Indiana University, USA. [email protected] Abstract—We present DeepPicar, a low-cost deep neural net- task may be directly linked to the safety of the vehicle. This work based autonomous car platform. DeepPicar is a small scale requires a high computing capacity as well as the means to replication of a real self-driving car called DAVE-2 by NVIDIA. guaranteeing the timings. On the other hand, the computing DAVE-2 uses a deep convolutional neural network (CNN), which takes images from a front-facing camera as input and produces hardware platform must also satisfy cost, size, weight, and car steering angles as output. DeepPicar uses the same net- power constraints, which require a highly efficient computing work architecture—9 layers, 27 million connections and 250K platform. These two conflicting requirements complicate the parameters—and can drive itself in real-time using a web camera platform selection process as observed in [25]. and a Raspberry Pi 3 quad-core platform. Using DeepPicar, we To understand what kind of computing hardware is needed analyze the Pi 3’s computing capabilities to support end-to-end deep learning based real-time control of autonomous vehicles. for AI workloads, we need a testbed and realistic workloads. We also systematically compare other contemporary embedded While using a real car-based testbed would be most ideal, it computing platforms using the DeepPicar’s CNN-based real-time is not only highly expensive, but also poses serious safety control workload. -

Security Monitor for Mobile Devices: Design and Applications
UNIVERSITY OF CALIFORNIA, IRVINE Security Monitor for Mobile Devices: Design and Applications DISSERTATION submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSOPHY in Computer Science by Saeed Mirzamohammadi Dissertation Committee: Professor Ardalan Amiri Sani, UCI, Chair Professor Gene Tsudik, UCI Professor Sharad Mehrotra, UCI Doctor Sharad Agarwal, MSR 2020 Portion of Chapter 1 c 2018 ACM, reprinted, with permission, from [148] Portion of Chapter 1 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 1 c 2018 IEEE, reprinted, with permission, from [149] Portion of Chapter 1 c 2020 ACM, reprinted, with permission, from [151] Portion of Chapter 2 c 2018 ACM, reprinted, with permission, from [148] Portion of Chapter 2 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 3 c 2018 ACM, reprinted, with permission, from [148] Portion of Chapter 4 c 2018 IEEE, reprinted, with permission, from [149] Portion of Chapter 5 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 6 c 2020 ACM, reprinted, with permission, from [151] Portion of Chapter 7 c 2020 ACM, reprinted, with permission, from [151] Portion of Chapter 7 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 7 c 2018 IEEE, reprinted, with permission, from [149] Portion of Chapter 7 c 2018 ACM, reprinted, with permission, from [148] All other materials c 2020 Saeed Mirzamohammadi TABLE OF CONTENTS Page LIST OF FIGURES v LIST OF TABLES vii ACKNOWLEDGMENTS viii VITA ix ABSTRACT OF THE DISSERTATION xi 1 Introduction 1 1.1 Applications of the security monitor . -

Cubieboard Cubieboard2 Cubietruck Beaglebone Black
Raspberry Pi (Model B rev.2) Cubieboard Cubieboard2 Cubietruck Beaglebone Black 1 Ghz (OC) ARM® Cortex-A6 1 Ghz ARM® Cortex-A8 1 Ghz ARM® Cortex-A7 Dual Core 1 Ghz ARM® Cortex-A7 Dual Core 1 Ghz ARM® Cortex-A8 CPU ARM1176JZF-F Allwinner A10 C8096CA Allwinner A20 Allwinner A20 AM335x GPU/FPU VideoCore IV Mali-400 (CedarX, OpenGL) Mali-400MP2 (CedarX, OpenGL) Mali-400MP2 (CedarX, OpenGL) SGX350 3D / NEON FPU accelerator RAM 512 MB 1 GB DDR3 2 GB 2 GB 512 MB DDR3 Storage micro SD/SDHC 4 GB NAND Flash, micro SD/SDHC, SATA 4 GB NAND Flash, micro SD/SDHC, SATA 4 GB NAND Flash, micro SD/SDHC, SATA 2.0 2GB eMMC Power micro USB (5V/1A) 3.5 W DC 5v/2A DC 5v/2A DC 5v/2.5A DC 5V/500mA Video RCA Composite Video, HDMI 1.4 HDMI HDMI HDMI/VGA microHDMI Audio 3.5 mm Headphone Jack 3.5 mm Headphone Jack / Line In 3.5 mm Headphone Jack 3.5 mm Headphone Jack, SPDIF Network 10/100 Mbps 10/100 Mbps 10/100 Mbps 10/100/1000 Mbps, Wifi, Bluetooth 10/100 Mbps 2x46 PIN GPIO I/O ports 26 PIN GPIO, 2x Ribon 2x48 PIN GPIO, 4PIN Serial, 1IR 2x48 PIN GPIO, 4PIN Serial, 1IR 1x 54 PIN GPIO (Arduino Shield Compatible) USB ports 2x USB 2.0 2x USB 2.0 2x USB 2.0, 1 mini USB OTG 2x USB 2.0, 1 mini USB OTG 1x USB 2.0 Linux (Raspbian, Debian, Fedora, Arch, Gentoo, Kali), Andoid, Angstrom, Ubuntu, Fedora, Gentoo. -

Procurement of Electric-Electronic
REQUEST FOR QUOTATION (RFQ) Procurement of Electric-Electronic Laboratory Equipment and Supplies for Adana and Mersin Innovation Centers Adana ve Mersin Yenilik Merkezleri için Elektrik-Elektronik Laboratuvarları Ekipman ve Sarf Malzemeleri Alım İhalesi Please enter Name, Address & Contact Details of your Firm DATE: February 10, 2020 Lütfen Firma Adı, Adresi ve İrtibat Bilgilerini buraya giriniz TARİH: 10 Şubat 2020 REFERENCE: UNDP-TUR-RFQ(MC1)-2020/07 Dear Sir / Madam: Sayın İlgili: We kindly request you to submit your Teklife Davet Ek 1’deki Teknik Şartnamede ve Ek quotation for “Procurement of Electric-Electronic 2’de yer alan Malzeme Listesi’nde detayları verilmiş Laboratory Equipment and Supplies for Adana and olan “Adana ve Mersin Yenilik Merkezleri için Mersin Innovation Centers”, as detailed in Technical Elektrik-Elektronik Laboratuvarları Ekipman ve Sarf Specifications and Supplies List provided as Annex Malzemeleri Alım İhalesi” için teklifinizi sunmanızı 1 and Annex 2 (respectively) of this RFQ. When rica ederiz. preparing your quotation, please be guided by the forms attached hereto as ANNEX 1, ANNEX 2 and Teklifinizi lütfen EK 1, EK 2 ve EK 3’de sunulmuş ANNEX 3. formların rehberliğinde hazırlayınız. Quotations shall be submitted on or before 27 Teklifler aşağıda belirtilen adrese, 27 Şubat 2020, February 2020, 14:00 hrs. Turkey Local Time, via Türkiye saati ile 14:00’a kadar elden, e-posta veya hand delivery, e-mail or courier mail to the address kargo yolu ile teslim edilmelidir: below: United Nations Development Programme Birleşmiş Milletler Kalkınma Programı (UNDP) (UNDP) Yıldız Kule, Yukarı Dikmen Mahallesi, Turan Güneş Yıldız Kule, Yukarı Dikmen Mahallesi, Turan Bulvarı, No:106, 06550, Çankaya, Ankara/Türkiye Güneş Bulvarı, No:106, 06550, Çankaya, İlgili Kişi: Ümit ALSAÇ Ankara/Turkey Satın Alma Yetkilisi, UNDP Attn: Mr.