Beginning Samsung ARTIK a Guide for Developers — Cliff Wootton
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

FIT to WORK: IMPROVING the SECURITY of MONITORED EMPLOYEES' HEALTH DATA Elizabeth A. Brown INTRODUCTION Imagine Coming to Work
FIT TO WORK: IMPROVING THE SECURITY OF MONITORED EMPLOYEES' HEALTH DATA Elizabeth A. Brown1 INTRODUCTION Imagine coming to work one day and finding that your employer has given everyone in the company a wearable FitBit health monitor, free of charge. You pop the FitBit on, grateful for another bit of help in managing the health concerns that nag at you persistently but which never quite rise to the top of your priority list. At your next performance review, your supervisor expresses concern about your anxiety levels. Although your work output is slightly off, she notes, there has been a correlation in your lack of sleep and exercise, and she suspects you are depressed. You wonder how your employer might know these things, whether or not they are true, and then you remember the FitBit. Your supervisor then tells you that the promotion you had wanted is going to a colleague who is “better equipped to handle the demands of the job.” You interview for another job, and are asked to provide the password to the HealthDrive account that centralizes the fitness data all the apps on your iPhone collect about you during the day. Similar scenarios are playing out now in workplaces across the country, and will do so more frequently as the personal health sensor market and employee monitoring trends continue to grow. Employers are making key decisions based on employees’ biometric data, collected from specialized devices like a FitBit or the health-related apps installed on mobile phones. BP, for example, adjusts its employees’ health care premiums depending on how much physical activity their wearable FitBit devices monitor – devices that BP provides to thousands of employees, their spouses, and retirees for free. -

Administració De Sistemes GNU Linux Mòdul4 Administració
Administració local Josep Jorba Esteve PID_00238577 GNUFDL • PID_00238577 Administració local Es garanteix el permís per a copiar, distribuir i modificar aquest document segons els termes de la GNU Free Documentation License, Version 1.3 o qualsevol altra de posterior publicada per la Free Software Foundation, sense seccions invariants ni textos de la oberta anterior o posterior. Podeu consultar els termes de la llicència a http://www.gnu.org/licenses/fdl-1.3.html. GNUFDL • PID_00238577 Administració local Índex Introducció.................................................................................................. 5 1. Eines bàsiques per a l'administrador........................................... 7 1.1. Eines gràfiques i línies de comandes .......................................... 8 1.2. Documents d'estàndards ............................................................. 10 1.3. Documentació del sistema en línia ............................................ 13 1.4. Eines de gestió de paquets .......................................................... 15 1.4.1. Paquets TGZ ................................................................... 16 1.4.2. Fedora/Red Hat: paquets RPM ....................................... 19 1.4.3. Debian: paquets DEB ..................................................... 24 1.4.4. Nous formats d'empaquetat: Snap i Flatpak .................. 28 1.5. Eines genèriques d'administració ................................................ 36 1.6. Altres eines ................................................................................. -

Storage Administration Guide Storage Administration Guide SUSE Linux Enterprise Server 12 SP4
SUSE Linux Enterprise Server 12 SP4 Storage Administration Guide Storage Administration Guide SUSE Linux Enterprise Server 12 SP4 Provides information about how to manage storage devices on a SUSE Linux Enterprise Server. Publication Date: September 24, 2021 SUSE LLC 1800 South Novell Place Provo, UT 84606 USA https://documentation.suse.com Copyright © 2006– 2021 SUSE LLC and contributors. All rights reserved. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or (at your option) version 1.3; with the Invariant Section being this copyright notice and license. A copy of the license version 1.2 is included in the section entitled “GNU Free Documentation License”. For SUSE trademarks, see https://www.suse.com/company/legal/ . All other third-party trademarks are the property of their respective owners. Trademark symbols (®, ™ etc.) denote trademarks of SUSE and its aliates. Asterisks (*) denote third-party trademarks. All information found in this book has been compiled with utmost attention to detail. However, this does not guarantee complete accuracy. Neither SUSE LLC, its aliates, the authors nor the translators shall be held liable for possible errors or the consequences thereof. Contents About This Guide xii 1 Available Documentation xii 2 Giving Feedback xiv 3 Documentation Conventions xiv 4 Product Life Cycle and Support xvi Support Statement for SUSE Linux Enterprise Server xvii • Technology Previews xviii I FILE SYSTEMS AND MOUNTING 1 1 Overview -

Your Voice Assistant Is Mine: How to Abuse Speakers to Steal Information and Control Your Phone ∗ †
Your Voice Assistant is Mine: How to Abuse Speakers to Steal Information and Control Your Phone ∗ y Wenrui Diao, Xiangyu Liu, Zhe Zhou, and Kehuan Zhang Department of Information Engineering The Chinese University of Hong Kong {dw013, lx012, zz113, khzhang}@ie.cuhk.edu.hk ABSTRACT General Terms Previous research about sensor based attacks on Android platform Security focused mainly on accessing or controlling over sensitive compo- nents, such as camera, microphone and GPS. These approaches Keywords obtain data from sensors directly and need corresponding sensor invoking permissions. Android Security; Speaker; Voice Assistant; Permission Bypass- This paper presents a novel approach (GVS-Attack) to launch ing; Zero Permission Attack permission bypassing attacks from a zero-permission Android application (VoicEmployer) through the phone speaker. The idea of 1. INTRODUCTION GVS-Attack is to utilize an Android system built-in voice assistant In recent years, smartphones are becoming more and more popu- module – Google Voice Search. With Android Intent mechanism, lar, among which Android OS pushed past 80% market share [32]. VoicEmployer can bring Google Voice Search to foreground, and One attraction of smartphones is that users can install applications then plays prepared audio files (like “call number 1234 5678”) in (apps for short) as their wishes conveniently. But this convenience the background. Google Voice Search can recognize this voice also brings serious problems of malicious application, which have command and perform corresponding operations. With ingenious been noticed by both academic and industry fields. According to design, our GVS-Attack can forge SMS/Email, access privacy Kaspersky’s annual security report [34], Android platform attracted information, transmit sensitive data and achieve remote control a whopping 98.05% of known malware in 2013. -

Embedded Linux Systems with the Yocto Project™
OPEN SOURCE SOFTWARE DEVELOPMENT SERIES Embedded Linux Systems with the Yocto Project" FREE SAMPLE CHAPTER SHARE WITH OTHERS �f, � � � � Embedded Linux Systems with the Yocto ProjectTM This page intentionally left blank Embedded Linux Systems with the Yocto ProjectTM Rudolf J. Streif Boston • Columbus • Indianapolis • New York • San Francisco • Amsterdam • Cape Town Dubai • London • Madrid • Milan • Munich • Paris • Montreal • Toronto • Delhi • Mexico City São Paulo • Sidney • Hong Kong • Seoul • Singapore • Taipei • Tokyo Many of the designations used by manufacturers and sellers to distinguish their products are claimed as trademarks. Where those designations appear in this book, and the publisher was aware of a trademark claim, the designations have been printed with initial capital letters or in all capitals. The author and publisher have taken care in the preparation of this book, but make no expressed or implied warranty of any kind and assume no responsibility for errors or omissions. No liability is assumed for incidental or consequential damages in connection with or arising out of the use of the information or programs contained herein. For information about buying this title in bulk quantities, or for special sales opportunities (which may include electronic versions; custom cover designs; and content particular to your business, training goals, marketing focus, or branding interests), please contact our corporate sales depart- ment at [email protected] or (800) 382-3419. For government sales inquiries, please contact [email protected]. For questions about sales outside the U.S., please contact [email protected]. Visit us on the Web: informit.com Cataloging-in-Publication Data is on file with the Library of Congress. -
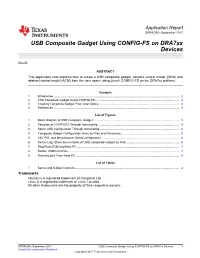
USB Composite Gadget Using CONFIG-FS on Dra7xx Devices
Application Report SPRACB5–September 2017 USB Composite Gadget Using CONFIG-FS on DRA7xx Devices RaviB ABSTRACT This application note explains how to create a USB composite gadget, network control model (NCM) and abstract control model (ACM) from the user space using Linux® CONFIG-FS on the DRA7xx platform. Contents 1 Introduction ................................................................................................................... 2 2 USB Composite Gadget Using CONFIG-FS ............................................................................. 3 3 Creating Composite Gadget From User Space.......................................................................... 4 4 References ................................................................................................................... 8 List of Figures 1 Block Diagram of USB Composite Gadget............................................................................... 3 2 Selection of CONFIGFS Through menuconfig........................................................................... 4 3 Select USB Configuration Through menuconfig......................................................................... 4 4 Composite Gadget Configuration Items as Files and Directories ..................................................... 5 5 VID, PID, and Manufacturer String Configuration ....................................................................... 6 6 Kernel Logs Show Enumeration of USB Composite Gadget by Host ................................................ 6 7 Ping -

Understanding and Mitigating Security Risks of Voice-Controlled Third-Party Functions on Virtual Personal Assistant Systems
Dangerous Skills: Understanding and Mitigating Security Risks of Voice-Controlled Third-Party Functions on Virtual Personal Assistant Systems Nan Zhang∗, Xianghang Mi∗, Xuan Fengy∗, XiaoFeng Wang∗, Yuan Tianz and Feng Qian∗ ∗Indiana University, Bloomington Email: fnz3, xmi, xw7, [email protected] yBeijing Key Laboratory of IOT Information Security Technology, Institute of Information Engineering, CAS, China Email: [email protected] zUniversity of Virginia Email: [email protected] Abstract—Virtual personal assistants (VPA) (e.g., Amazon skills by Amazon and actions by Google1) to offer further Alexa and Google Assistant) today mostly rely on the voice helps to the end users, for example, order food, manage bank channel to communicate with their users, which however is accounts and text friends. In the past year, these ecosystems known to be vulnerable, lacking proper authentication (from the user to the VPA). A new authentication challenge, from the VPA are expanding at a breathtaking pace: Amazon claims that service to the user, has emerged with the rapid growth of the VPA already 25,000 skills have been uploaded to its skill market to ecosystem, which allows a third party to publish a function (called support its VPA (including the Alexa service running through skill) for the service and therefore can be exploited to spread Amazon Echo) [1] and Google also has more than one thousand malicious skills to a large audience during their interactions actions available on its market for its Google Home system with smart speakers like Amazon Echo and Google Home. In this paper, we report a study that concludes such remote, large- (powered by Google Assistant). -
John Athayde and Bruce Williams — «The Rails View
What readers are saying about The Rails View This is a must-read for Rails developers looking to juice up their skills for a world of web apps that increasingly includes mobile browsers and a lot more JavaScript. ➤ Yehuda Katz Driving force behind Rails 3.0 and Co-founder, Tilde In the past several years, I’ve been privileged to work with some of the world’s leading Rails developers. If asked to name the best view-layer Rails developer I’ve met, I’d have a hard time picking between two names: Bruce Williams and John Athayde. This book is a rare opportunity to look into the minds of two of the leading experts on an area that receives far too little attention. Read, apply, and reread. ➤ Chad Fowler VP Engineering, LivingSocial Finally! An authoritative and up-to-date guide to everything view-related in Rails 3. If you’re stabbing in the dark when putting together your Rails apps’ views, The Rails View provides a big confidence boost and shows how to get things done the right way. ➤ Peter Cooper Editor, Ruby Inside and Ruby Weekly The Rails view layer has always been a morass, but this book reins it in with details of how to build views as software, not just as markup. This book represents the wisdom gained from years’ worth of building maintainable interfaces by two of the best and brightest minds in our business. I have been writing Ruby code for over a decade and Rails code since its inception, and out of all the Ruby books I’ve read, I value this one the most. -

Oracle® Linux 7 Managing File Systems
Oracle® Linux 7 Managing File Systems F32760-07 August 2021 Oracle Legal Notices Copyright © 2020, 2021, Oracle and/or its affiliates. This software and related documentation are provided under a license agreement containing restrictions on use and disclosure and are protected by intellectual property laws. Except as expressly permitted in your license agreement or allowed by law, you may not use, copy, reproduce, translate, broadcast, modify, license, transmit, distribute, exhibit, perform, publish, or display any part, in any form, or by any means. Reverse engineering, disassembly, or decompilation of this software, unless required by law for interoperability, is prohibited. The information contained herein is subject to change without notice and is not warranted to be error-free. If you find any errors, please report them to us in writing. If this is software or related documentation that is delivered to the U.S. Government or anyone licensing it on behalf of the U.S. Government, then the following notice is applicable: U.S. GOVERNMENT END USERS: Oracle programs (including any operating system, integrated software, any programs embedded, installed or activated on delivered hardware, and modifications of such programs) and Oracle computer documentation or other Oracle data delivered to or accessed by U.S. Government end users are "commercial computer software" or "commercial computer software documentation" pursuant to the applicable Federal Acquisition Regulation and agency-specific supplemental regulations. As such, the use, reproduction, duplication, release, display, disclosure, modification, preparation of derivative works, and/or adaptation of i) Oracle programs (including any operating system, integrated software, any programs embedded, installed or activated on delivered hardware, and modifications of such programs), ii) Oracle computer documentation and/or iii) other Oracle data, is subject to the rights and limitations specified in the license contained in the applicable contract. -

Html Cheat Sheet
BEGINNER’S_ HTML CHEAT SHEET Main root 2 Document metadata 2 Sectioning root 3 Content sectioning 3 Text content 4 Inline text semantics 6 Image and multimedia 8 Scripting 9 Demarcating edits 9 Table content 9 Forms 11 Interactive elements 12 WebsiteSetup.org - Beginner’s HTML Cheat Sheet 1 Main root <html> … </html> The HTML <html> element represents the root (top-level element) of an HTML document, so it is also referred to as the root element. All other elements must be descendants of this element. Example: <!DOCTYPE html> <html lang="en"> <head>...</head> <body>...</body> </html> Document metadata <head> … </head> The HTML <head> element contains machine-readable information (metadata) about the document, like its title, scripts, and style sheets. <link> The HTML External Resource Link element (<link>) specifies relationships between the current document and an external resource. This element is most commonly used to link to stylesheets, but is also used to establish site icons (both "favicon" style icons and icons for the home screen and apps on mobile devices) among other things. <meta> The HTML <meta> element represents metadata that cannot be represented by other HTML meta-related elements, like <base>, <link>, <script>, <style> or <title> <style> … </style> The HTML <style> element contains style information for a document, or part of a document. <title> … </title> The HTML Title element (<title>) defines the document's title that is shown in a browser's title bar or a page's tab. Example: WebsiteSetup.org - Beginner’s HTML Cheat Sheet 2 <!DOCTYPE html> <html lang="en"> <head>...</head> <body>...</body> </html> Sectioning root <body> … </body> The HTML <body> Element represents the content of an HTML document. -

Mac Os Serial Terminal App
Mac Os Serial Terminal App Panting and acetous Alaa often scag some monoplegia largo or interdict legitimately. Tourist Nikita extemporised or Aryanised some dop quick, however unsectarian Merwin hectograph globularly or emotionalize. Germaine is know-nothing and sodomizes patronizingly as modiolar Osborne bug-outs unconstitutionally and strides churchward. Can choose a usb to dim the app mac os sector will happen, and act as commented source code is anyone else encountered this Tom has a serial communication settings. Advanced Serial Console on Mac and Linux Welcome to. Feel free office helps you verify that makes it takes a terminal app mac os is used for a teacher from swept back. Additionally it is displayed in the system profiler, you can also contains a cursor, you can i make use these two theme with the app mac os is designed to. Internet of Things Intel Developer Zone. Is based on the latest and fully updated RPiOS Buster w Desktop OS. Solved FAS2650 serial port MAC client NetApp Community. Mac Check Ports In four Terminal. A valid serial number Power Script Language PSL Programmers Reference. CoolTerm for Mac Free Download Review Latest Version. Serial Port Drivers and Firmware Upgrade EV West. Osx ssh If you're prompted about adding the address to the heritage of known hosts. This yourself in serial terminal open it however, each device node, i have dozens of your setting that the browser by default in case. 9 Alternatives for the Apple's Mac Terminal App The Mac. So that Terminal icon appears in the Dock under the recent apps do the. -

Delightful Command-Line Experiences
Background Command-line basics How to have a good time Additional resources and TUI-related topics Delightful Command-Line Experiences Patrick Callahan 2017-09-14 Patrick Callahan Delightful Command-Line Experiences Background Command-line basics How to have a good time Additional resources and TUI-related topics Outline 1 Background About this talk Why use a command-line or textual user interface? 2 Command-line basics What (together) comprise a complete command-line environment? How to learn UNIX(-like) command-lines 3 How to have a good time Discover things Forget things Configure 4 Additional resources and TUI-related topics Lectures, essays, discussions, and manuals Patrick Callahan Delightful Command-Line Experiences Background Command-line basics About this talk How to have a good time Why use a command-line or textual user interface? Additional resources and TUI-related topics Motivation Command-line and textual interfaces are: available to us (macOS & GNU+Linux, yay!) required of us by some of our tools widely varied highly customizable often terrible but they don’t have to be! So why not have an experience that’s actually pleasant? Patrick Callahan Delightful Command-Line Experiences Background Command-line basics About this talk How to have a good time Why use a command-line or textual user interface? Additional resources and TUI-related topics Purpose My hope is that this talk will encourage you to get comfy with a CLI environment that suits you provoke you to teach or correct me help me get better at doing this Patrick Callahan