Lectures on Moving Frames
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Hierarchy of Proof Rules for Checking Differential Invariance of Algebraic Sets Khalil Ghorbal∗ Andrew Sogokon∗ Andre´ Platzer∗ November 2014 CMU-CS-14-140
A Hierarchy of Proof Rules for Checking Differential Invariance of Algebraic Sets Khalil Ghorbal∗ Andrew Sogokon∗ Andre´ Platzer∗ November 2014 CMU-CS-14-140 Publisher: School of Computer Science Carnegie Mellon University Pittsburgh, PA, 15213 To appear [14] in the Proceedings of the 16th International Conference on Verification, Model Checking, and Abstract Interpretation (VMCAI 2015), 12-14 January 2015, Mumbai, India. This material is based upon work supported by the National Science Foundation (NSF) under NSF CA- REER Award CNS-1054246, NSF EXPEDITION CNS-0926181, NSF CNS-0931985, by DARPA under agreement number FA8750-12-2-029, as well as the Engineering and Physical Sciences Research Council (UK) under grant EP/I010335/1. The views and conclusions contained in this document are those of the authors and should not be inter- preted as representing the official policies, either expressed or implied, of any sponsoring institution or government. Keywords: algebraic invariant, deductive power, hierarchy, proof rules, differential equation, abstraction, continuous dynamics, formal verification, hybrid system Abstract This paper presents a theoretical and experimental comparison of sound proof rules for proving invariance of algebraic sets, that is, sets satisfying polynomial equalities, under the flow of poly- nomial ordinary differential equations. Problems of this nature arise in formal verification of con- tinuous and hybrid dynamical systems, where there is an increasing need for methods to expedite formal proofs. We study the trade-off between proof rule generality and practical performance and evaluate our theoretical observations on a set of heterogeneous benchmarks. The relationship between increased deductive power and running time performance of the proof rules is far from obvious; we discuss and illustrate certain classes of problems where this relationship is interesting. -

Moving Parseval Frames for Vector Bundles
Houston Journal of Mathematics c 2014 University of Houston Volume 40, No. 3, 2014 MOVING PARSEVAL FRAMES FOR VECTOR BUNDLES D. FREEMAN, D. POORE, A. R. WEI, AND M. WYSE Communicated by Vern I. Paulsen Abstract. Parseval frames can be thought of as redundant or linearly de- pendent coordinate systems for Hilbert spaces, and have important appli- cations in such areas as signal processing, data compression, and sampling theory. We extend the notion of a Parseval frame for a fixed Hilbert space to that of a moving Parseval frame for a vector bundle over a manifold. Many vector bundles do not have a moving basis, but in contrast to this every vector bundle over a paracompact manifold has a moving Parseval frame. We prove that a sequence of sections of a vector bundle is a moving Parseval frame if and only if the sections are the orthogonal projection of a moving orthonormal basis for a larger vector bundle. In the case that our vector bundle is the tangent bundle of a Riemannian manifold, we prove that a sequence of vector fields is a Parseval frame for the tangent bundle of a Riemannian manifold if and only if the vector fields are the orthogonal projection of a moving orthonormal basis for the tangent bundle of a larger Riemannian manifold. 1. Introduction Frames for Hilbert spaces are essentially redundant coordinate systems. That is, every vector can be represented as a series of scaled frame vectors, but the series is not unique. Though this redundancy is not necessary in a coordinate system, it can actually be very useful. -
Chapter 2: Minkowski Spacetime
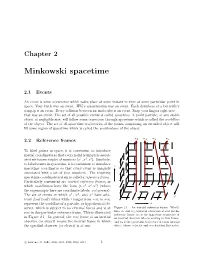
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -
The Light Cone and the Conformal Sphere: Differential Invariants And
Light cone and conformal sphere The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Theresa C. Anderson April, 2010 Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere Motivation: The recent concept of the group-based moving frame as an equivariant map, introduced by Fels and Olver, has been a useful aid in the quest for differential invariants. The moving frame is used to construct the Maurer-Cartan matrix K; which according to a theorem of Hubert, contains all generators for the differential invariants of a curve. Here we employ the normalization technique of Fels and Olver to construct group-based moving frames for the light cone and the conformal 2-sphere, and we use the moving frame to find the differential invariants. Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Euclidean space admits a natural action from the Euclidean group, the group of rigid transformations (rotations and translations). Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). -

Symmetry Transformation Groups and Differential Invariants — Eivind Schneider
FACULTY OF SCIENCE AND TECHNOLOGY Department of Mathematics and Statistics Symmetry transformation groups and differential invariants — Eivind Schneider MAT-3900 Master’s Thesis in Mathematics November 2014 Abstract There exists a local classification of finite-dimensional Lie algebras of vector fields on C2. We lift the Lie algebras from this classification to the bundle C2 × C and compute differential invariants of these lifts. Acknowledgements I am very grateful to Boris Kruglikov for coming up with an interesting assignment and for guiding me through the work on it. I also extend my sincere gratitude to Valentin Lychagin for his help through many insightful lectures and conversations. A heartfelt thanks to you both, for sharing your knowledge and for the inspiration you give me. I would like to thank Henrik Winther for many helpful discussions. Finally, I thank my family, and especially my wife, Susann, for their support and encouragement. ii Contents 1 Introduction 1 2 Preliminaries 3 2.1 Jet spaces and prolongation of vector fields . 3 2.2 Classification of Lie algebras of vector fields in one and two dimensions . 5 2.3 Lifts . 7 2.3.1 Cohomology . 8 2.3.2 Coordinate change . 9 2.4 Differential invariants . 9 2.4.1 Determining the number of differential invariants of order k ........................... 10 2.4.2 Invariant derivations . 11 2.4.3 Tresse derivatives . 12 2.4.4 The Lie-Tresse theorem . 13 3 Warm-up: Differential invariants of lifts of Lie algebras in D(C) 15 3.1 g1 = h@xi .............................. 15 3.2 g2 = h@x; x@xi .......................... -

The Invariant Variational Bicomplex
Contemporary Mathematics The Invariant Variational Bicomplex Irina A. Kogan and Peter J. Olver Abstract. We establish a group-invariant version of the variational bicom- plex that is based on a general moving frame construction. The main appli- cation is an explicit group-invariant formula for the Euler-Lagrange equations of an invariant variational problem. 1. Introduction. Most modern physical theories begin by postulating a symmetry group and then formulating ¯eld equations based on a group-invariant variational principle. As ¯rst recognized by Sophus Lie, [17], every invariant variational problem can be written in terms of the di®erential invariants of the symmetry group. The associated Euler-Lagrange equations inherit the symmetry group of the variational problem, and so can also be written in terms of the di®erential invariants. Surprisingly, to date no-one has found a general group-invariant formula that enables one to directly construct the Euler-Lagrange equations from the invariant form of the variational problem. Only a few speci¯c examples, including plane curves and space curves and surfaces in Euclidean geometry, are worked out in Gri±ths, [12], and in Anderson's notes, [3], on the variational bicomplex. In this note, we summarize our recent solution to this problem; full details can be found in [16]. Our principal result is that, in all cases, the Euler-Lagrange equations have the invariant form (1) A¤E(L) ¡ B¤H(L) = 0; where E(L) is an invariantized version of the usual Euler-Lagrange expression or e e \Eulerian", while H(L) is an invariantized Hamiltonian, which in the multivariate context is,ein fact, a tensor, [20], and A¤; B¤ certain invariant di®erential operators, which we name the Euleriane and Hamiltonian operators. -

Differential Invariant Algebras
Differential Invariant Algebras Peter J. Olver† School of Mathematics University of Minnesota Minneapolis, MN 55455 [email protected] http://www.math.umn.edu/∼olver Abstract. The equivariant method of moving frames provides a systematic, algorith- mic procedure for determining and analyzing the structure of algebras of differential in- variants for both finite-dimensional Lie groups and infinite-dimensional Lie pseudo-groups. This paper surveys recent developments, including a few surprises and several open ques- tions. 1. Introduction. Differential invariants are the fundamental building blocks for constructing invariant differential equations and invariant variational problems, as well as determining their ex- plicit solutions and conservation laws. The equivalence, symmetry and rigidity properties of submanifolds are all governed by their differential invariants. Additional applications abound in differential geometry and relativity, classical invariant theory, computer vision, integrable systems, geometric flows, calculus of variations, geometric numerical integration, and a host of other fields of both pure and applied mathematics. † Supported in part by NSF Grant DMS 11–08894. November 16, 2018 1 Therefore, the underlying structure of the algebras‡ of differential invariants for a broad range of transformation groups becomes a topic of great importance. Until recently, though, beyond the relatively easy case of curves, i.e., functions of a single independent variable, and a few explicit calculations for individual higher dimensional examples, -
The Structure of Differential Invariant Algebras of Lie Groups and Lie
The Structure of Di®erential Invariant Algebras of Lie Groups and Lie Pseudo{Groups Peter J. Olver University of Minnesota http://www.math.umn.edu/ » olver =) Juha Pohjanpelto Jeongoo Cheh à 0 Sur la th¶eorie, si importante sans doute, mais pour nous si obscure, des ¿groupes de Lie in¯nis, nous ne savons rien que ce qui trouve dans les m¶emoires de Cartan, premiere exploration a travers une jungle presque imp¶en¶etrable; mais celle-ci menace de se refermer sur les sentiers d¶eja trac¶es, si l'on ne procede bient^ot a un indispensable travail de d¶efrichement. | Andr¶e Weil, 1947 à 1 Pseudo-groups in Action ² Lie | Medolaghi | Vessiot ² Cartan : : : Guillemin, Sternberg ² Kuranishi, Spencer, Goldschmidt, Kumpera, : : : ² Relativity ² Noether's Second Theorem ² Gauge theory and ¯eld theories Maxwell, Yang{Mills, conformal, string, : : : ² Fluid Mechanics, Metereology Euler, Navier{Stokes, boundary layer, quasi-geostropic , : : : ² Linear and linearizable PDEs ² Solitons (in 2 + 1 dimensions) K{P, Davey-Stewartson, : : : ² Image processing ² Numerical methods | geometric integration ² Kac{Moody symmetry algebras ² Lie groups! à 2 What's New? Direct constructive algorithms for: ² Invariant Maurer{Cartan forms ² Structure equations ² Moving frames ² Di®erential invariants ² Invariant di®erential operators ² Constructive Basis Theorem ² Syzygies and recurrence formulae ² GrÄobner basis constructions ² Further applications =) Symmetry groups of di®erential equations =) Vessiot group splitting =) Gauge theories =) Calculus of variations à 3 Di®erential Invariants G | transformation group acting on p-dimensional submani- folds N = fu = f(x)g ½ M G(n) | prolonged action on the submanifold jet space Jn = Jn(M; p) Di®erential invariant I : Jn ! R I(g(n) ¢ (x; u(n))) = I(x; u(n)) =) curvature, torsion, : : : Invariant di®erential operators: D1; : : : ; Dp =) arc length derivative ? ? I(G) | the algebra of di®erential invariants ? ? à 4 The Basis Theorem Theorem. -

Moving Frames
Moving Frames Peter J. Olver University of Minnesota http://www.math.umn.edu/ ∼ olver Benasque, September 2009 History of Moving Frames Classical contributions: M. Bartels (∼1800), J. Serret, J. Fr´enet, G. Darboux, ´ E. Cotton, El´ ie Cartan Modern developments: (1970’s) S.S. Chern, M. Green, P. Griffiths, G. Jensen, T. Ivey, J. Landsberg, . The equivariant approach: (1997 – ) PJO, M. Fels, G. Mar´ı–Beffa, I. Kogan, J. Cheh, J. Pohjanpelto, P. Kim, M. Boutin, D. Lewis, E. Mansfield, E. Hubert, E. Shemyakova, O. Morozov, R. McLenaghan, R. Smirnov, J. Yue, A. Nikitin, J. Patera, P. Vassiliou, . Moving Frame — Space Curves t b tangent normal binormal dz d2z n t = n = b = t × n ds ds2 s — arc length Fr´enet–Serret equations dt dn db = κ n = − κ t + τ b = − τ n ds ds ds κ — curvature τ — torsion Moving Frame — Space Curves t b tangent normal binormal dz d2z n t = n = b = t × n ds ds2 s — arc length z Fr´enet–Serret equations dt dn db = κ n = − κ t + τ b = − τ n ds ds ds κ — curvature τ — torsion “I did not quite understand how he [Cartan] does this in general, though in the examples he gives the procedure is clear.” “Nevertheless, I must admit I found the book, like most of Cartan’s papers, hard reading.” — Hermann Weyl “Cartan on groups and differential geometry” Bull. Amer. Math. Soc. 44 (1938) 598–601 Applications of Moving Frames • Differential geometry • Equivalence • Symmetry • Differential invariants • Rigidity • Identities and syzygies • Joint invariants and semi-differential invariants • Invariant differential forms and tensors • Integral invariants • Classical invariant theory • Computer vision ◦ object recognition ◦ symmetry detection • Invariant variational problems • Invariant numerical methods • Mechanics, including DNA • Poisson geometry & solitons • Killing tensors in relativity • Invariants of Lie algebras in quantum mechanics • Control theory • Lie pseudo-groups The Basic Equivalence Problem M — smooth m-dimensional manifold. -

Bulletin De La S
BULLETIN DE LA S. M. F. GLORIA MARÍ BEFFA The theory of differential invariants and KDV hamiltonian evolutions Bulletin de la S. M. F., tome 127, no 3 (1999), p. 363-391 <http://www.numdam.org/item?id=BSMF_1999__127_3_363_0> © Bulletin de la S. M. F., 1999, tous droits réservés. L’accès aux archives de la revue « Bulletin de la S. M. F. » (http: //smf.emath.fr/Publications/Bulletin/Presentation.html) implique l’accord avec les conditions générales d’utilisation (http://www.numdam.org/ conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit contenir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ Bull. Soc. math. France, 127, 1999, p. 363-391. THE THEORY OF DIFFERENTIAL INVARIANTS AND KDV HAMILTONIAN EVOLUTIONS BY GLORIA MARI BEFFA (*) ABSTRACT. — In this paper I prove that the second KdV Hamiltonian evolution associated to SL(n, R) can be view as the most general evolution of projective curves, invariant under the SL(n,R)-projective action on RP"'"1, provided that certain integrability conditions are satisfied. This way, I establish a very close relationship between the theory of geometrical invariance, and KdV Hamiltonian evolutions. This relationship was conjectured in [4]. RESUME. — LA THEORIE DES INVARIANTS DIFFERENTIELS ET LES EVOLUTIONS HAMILTONIENNES DE KDV. — Dans cet article, je prouve que la seconde evolution hamiltonienne de KdV, associee au groupe SL(n,R), peut etre consideree comme 1'evolution la plus generale des courbes projectives qui sont invariantes par Faction projective de SL(n, R) sur RP71"1, si une certaine condition d'integrabilite est satisfaite. -

Point Classification of 2Nd Order Odes: Tresse Classification
Point classification of 2nd order ODEs: Tresse classification revisited and beyond Boris Kruglikov Abstract In 1896 Tresse gave a complete description of relative differential in- variants for the pseudogroup action of point transformations on the 2nd order ODEs. The purpose of this paper is to review, in light of modern geometric approach to PDEs, this classification and also discuss the role of absolute invariants and the equivalence problem.1 Introduction Second order scalar ordinary differential equations have been the classical tar- get of investigations and source of inspiration for complicated physical models. Under contact transformations all these equations are locally equivalent, but to find such a transformation for a pair of ODEs is the same hard problem as to find a general solution, which as we know from Ricatti equations is not always possible. Most integration methods for second order ODEs are related to another pseudogroup action – point transformations, which do not act transitively on the space of all such equations. All linear 2nd order ODEs are point equivalent. S. Lie noticed that ODEs linearizable via point transformations have neces- sarily cubic nonlinearity in the first derivatives and described a general test to construct this linearization map [Lie2]. Later R. Liouville found precise condi- tions for linearization [Lio]. But it was A. Tresse who first wrote the complete set of differential invariants for general 2nd order ODEs. arXiv:0809.4653v1 [math.CA] 26 Sep 2008 The paper [Tr2] is a milestone in the geometric theory of differential equa- tions, but mostly one result (linearization of S.Lie-R.Liouville-A.Tresse) from the manuscript is used nowadays. -

Moving Frames Astérisque, Tome S131 (1985), P
Astérisque SHIING-SHEN CHERN Moving frames Astérisque, tome S131 (1985), p. 67-77 <http://www.numdam.org/item?id=AST_1985__S131__67_0> © Société mathématique de France, 1985, tous droits réservés. L’accès aux archives de la collection « Astérisque » (http://smf4.emath.fr/ Publications/Asterisque/) implique l’accord avec les conditions générales d’uti- lisation (http://www.numdam.org/conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit contenir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ Société Mathématique de France Astérisque, hors série, 1985, p. 67-77 MOVING FRAMES BY Shiing-shen CHERN1 Introduction The method of moving frames has a long history. It is at the heart of kinematics and its conscious application to differential geometry could be traced back at least to SERRET and FRENET2. In his famous "Leçons sur la théorie des surfaces," based on lectures at the Sorbonne 1882-1885, DAR- BOUX had the revolutionary idea using frames depending on two parameters and integrability conditions turn up. DARBOUX'S method was generalized to arbitrary Lie groups by Emile COTTON [14] for the search of differen tial invariants, whose work should be considered a forerunner of the general method of moving frames. CARTAN'S first paper on moving frames was published in 1910 [7]. He im mediately observed that DARBOUX'S partial derivatives should be combined into the "Maurer-Cartan forms" and DARBOUX'S integrability conditions are essentially the Maurer-Cartan equations. This extends the method to the case where the ambient space is acted on by any Lie group and, more generally, by an infinite pseudogroup in CARTAN'S sense, such as the pseu- dogroup of all complex analytic automorphisms in n variables.